一种钻杆自动定位及接头对准系统
文献发布时间:2023-06-19 12:08:44
技术领域
本发明涉及钻杆接头检测技术领域;尤其涉及一种钻杆自动定位及接头对准系统。
背景技术
铁钻工是自动化石油钻井生产中钻机的配套设备,广泛应用与海洋、陆地钻井、修井作业时上卸扣,是液压大钳的升级产品。目前国外的主要石油设备厂商已经开发出几代铁钻工产品,实现了电液自动控制;而国内对铁钻工的研制还处于起步阶段,控制方面基本采用液气控制。在铁钻工进行上卸扣作业时,需要人工判断钳体是否对准钻杆的接头部位。其智能化程度低,工人劳动强度大。若能通过引入视觉系统对钻杆的定位和上卸扣的对准进行更加智能化的控制,那么在一定程度上可以提高工人的工作效率,降低安全隐患,减少人力成本,进一步实现井口自动化操作。
发明内容
本发明的目的是提供了一种钻杆自动定位及接头对准系统。本发明针对现有技术铁钻工对钻杆的定位以及上卸扣对准问题,提出基于视觉的钻杆定位以及接头对准方法,为实现井口自动化操作做准备。
本发明是通过以下技术方案实现的:
本发明涉及一种钻杆自动定位及接头对准系统,包括:视觉传感器、超声波传感器及信号处理单元;
所述视觉传感器用于获取井口钻杆图像;所述视觉传感器经过A/D转换后,将数字图像实时的传入上位机进行图像处理;
所述超声波传感器用于获取钻杆的距离信息,经过图像处理得到钻杆的边缘、中心以及钻杆接头的特征量后,引导超声波探测器对钻杆距离进行测量,融合视觉信号与超声信号得到完整的钻杆位置信息与钻杆接头位置信息。
所述超声波传感器是在图像处理过后得到所需的特征量后,引导超声波探测器对距离进行测量,由发射和接收探头构成,根据声波反射的原理,检测由目标反射回的声波信号,经处理后得到钻杆的距离信息。
优选地,所述上位机图像处理为将视觉传感器获取的图像信息通过图像分割和边缘检测来确定钻杆位置和接头位置。
优选地,所述上位机图像处理的具体步骤为:
步骤1,图像预处理;
步骤2,图像分割,在图像灰度化后,根据图像中要提取的目标与背景区域在灰度特性上的差异,把图像视为具有不同灰度级的区域组合,通过选取阈值将钻杆从背景中分离出来;
步骤3,边缘检测,采用Canny算子进行边缘检测;
步骤4,采用Hough变换进行直线提取。
优选地,步骤1中,所述图像预处理具体为:
步骤1.1,采用直方图均衡化,增加像素灰度值的动态范围,对图像进行增强;
步骤1.2,采用中值滤波的方法,降低图像边界部分的模糊程度,滤除图像噪声。
优选地,步骤2中,所述选取阈值采用迭代法,具体步骤为:
步骤2.1,求取图像中的最大和最小灰度值S
T
步骤2.2,根据阈值T
步骤2.3,求出新的阈值:T
步骤2.4,如果T
本发明具有以下优点:
(1)本发明所述视觉传感器安装在末端执行器上,构成手眼视觉,超声波传感器的接收和发送探头也固定在末端执行器上,由视觉传感器获取待识别和定位物体的二维图像,并引导超声波传感器获取距离信息,从而实现了对目标物体的三维定位。
(2)本发明将图像信息与超声波采集到的距离信息传输到上位机,上位机经过数据处理后将控制信号发送给末端执行机构,最终使末端执行机构运动到理想的目标位置。与现有技术相比,本发明的对准方法采用了视觉的方式来进行钻杆位置以及上卸扣的对准,该对准方法较传统方法效率更高,且能实现对钻杆的自动定位,为进一步实现井口自动化操作做出了准备。
附图说明
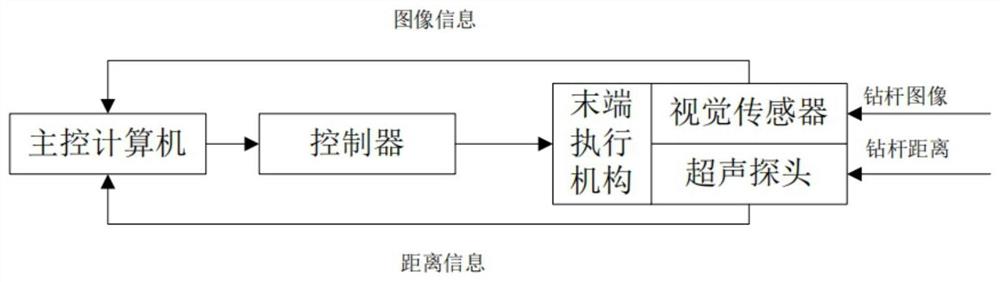
图1为钻杆自动定位及接头对准系统的结构图;
图2为本发明系统所涉及的图像处理模块流程图。
具体实施方式
下面结合具体实施例对本发明进行详细说明。应当指出的是,以下的实施实例只是对本发明的进一步说明,但本发明的保护范围并不限于以下实施例。
实施例
本实施例涉及一种钻杆自动定位及接头对准系统,如图1所示,包括:视觉传感器、超声波传感器及信号处理单元;
所述视觉传感器安装在末端执行器上,构成手眼视觉,超声波传感器的接收和发送探头也固定在末端执行器上,由视觉传感器获取待识别和定位物体的二维图像,并引导超声波传感器获取距离信息;从而实现了对目标物体的三维定位。再将图像信息与超声波采集到的距离信息传输到上位机,上位机经过数据处理后将控制信号发送给末端执行机构,最终使末端执行机构运动到理想的目标位置。
所述视觉传感器是对现场惊醒图像采集;通过采集钻杆图像,将图像传输到主控计算机中进行图像处理。
所述超声波传感器是将通过在图像处理过后得到所需的特征量后,引导超声波探测器对距离进行测量,根据声波反射的原理,检测由目标反射回的声波信号,经处理后得到钻杆的距离信息。
如图2所示,通过图像处理进行钻杆位置信息与接头位置信息的确定,具体步骤为:
步骤1、通过视觉传感器采集钻杆的图像信息并进行图像预处理。
所述钻杆图像预处理主要包括:图像增强和滤除噪声。
步骤1.1,采用直方图均衡化,增加像素灰度值的动态范围,对图像进行增强;
步骤1.2,采用中值滤波的方法,降低图像边界部分的模糊程度,滤除图像噪声。
步骤2、进行图像分割,在钻杆图像灰度化后,根据图像中要提取的钻杆与背景区域在灰度特性上的差异,把图像视为具有不同灰度级的区域组合,通过选取阈值将钻杆从背景中分离出来。采用迭代法求取最佳阈值的分割算法。
步骤2中所述的图像分割,具体步骤为:
步骤2.1、求取图像中的最大和最小灰度值S
T
步骤2.2、根据阈值T
其中S为灰度值,N为权重系数。
步骤2.3,求出新的阈值:T
步骤2.4,如果T
步骤3,采用Canny算子进行边缘检测;用高斯滤波器平滑图像,计算滤波后的图像梯度的幅值和方向。对梯度幅值应用非极大值抑制,把其他非局部极大值点置零得到细化的边缘。用双阈值算法检测和连接边缘。
步骤4、采用Hough变换进行直线提取。
本发明针对现有的铁钻工对钻杆的定位以及上卸扣对准问题,提出基于视觉的钻杆定位以及接头对准方法,为实现井口自动化操作做准备。本发明系统主要包括了视觉传感器和超声波传感器以及相应的信号处理单元。所述视觉传感器安装在末端执行器上,构成手眼视觉,超声波传感器的接收和发送探头也固定在末端执行器上,由视觉传感器获取待识别和定位物体的二维图像,并引导超声波传感器获取距离信息。从而实现了对目标物体的三维定位。再将图像信息与超声波采集到的距离信息传输到上位机,上位机经过数据处理后将控制信号发送给末端执行机构,最终使末端执行机构运动到理想的目标位置。与现有技术相比,本发明采用了视觉的方式来进行钻杆位置以及上卸扣的对准,该对准方法较传统方法效率更高,且能实现对钻杆的自动定位,为实现井口自动化操作做出了准备。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质。
- 一种钻杆自动定位及接头对准系统
- 一种自动焊接头的对准和引导系统及其方法