一种起重机制动距离测量装置
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及机械测量技术领域,特别涉及一种起重机制动距离的测量。
背景技术
下降制动距离是起重机起升机构制动性能的重要技术指标,若下降制动距离超过既定标准,则说明起重机的制动器制动能力不足,这就很可能导致在起重机吊运重物时发生“溜钩”的情况,这种情况会导致运送材料的损坏甚至对他人的生命安全造成威胁,故对起重机起升机构制动性能的检测是个很重要的环节。
现有技术公开了一种起重机起升机构下降制动距离的在线检测装置及方法,该装置包括起重机运行工况信号检测部分和测量记录部分,运行工况信号检测部分包括编码器、制动器失电检测单元、起升方向检测单元;测量记录部分包括控制器、信号接口单元、显示和操作单元和数据存储单元;编码器是增量编码器,或绝对值编码器。制动距离在线检测方法是测量记录部分实时监测起升机构下降制动过程,获得下降制动距离数据,计算下降制动距离。测量记录部分实时测量和记录每次制动距离测算结果,当制动距离接近或超过规定值时发出预警信号,提示制动性能劣化。但是该装置的结构复杂,安装过程较为繁琐,不利于实际操作,且所述装置无法给出起重机的具体制动距离数据。
发明内容
本发明的目的在于提供一种起重机制动距离测量装置,以解决一般起重机制动距离检测装置无法给出起重机具体制动距离的问题。
为解决上述技术问题,本发明提供一种起重机制动距离测量装置,包括:标记单元、图像采集单元、图像处理单元;所述标记单元设置于起重机卷筒的第一端面上;所述图像采集单元与起重机制动器启动单元通信连接,所述图像采集单元用于采集所述起重机制动过程中所述卷筒第一端面的实时图像,并将所述实时图像传输至所述图像处理单元;所述图像处理单元用于根据所述实时图像获取所述起重机的制动距离。
优选的,所述标记单元包括一系列形状各不相同的标记。
优选的,所述标记沿卷筒所述第一端面周向间隔设置。
优选的,还包括延时单元,所述延时单元分别与所述制动器启动单元以及所述制动器通信连接;所述延时单元用于延迟所述制动器接收到所述制动器启动单元的信号的时间。
优选的,所述延时单元的延时时长设置为所述图像采集单元的成像时间。
优选的,所述图像采集单元垂直设置在靠近所述卷筒第一端面处。
可选的,所述图像采集单元为一工业相机。
优选的,还包括显示单元,所述显示单元与所述图像处理单元通信连接;所述显示单元用于显示所述图像处理单元的处理结果。
为解决上述技术问题,本发明还提供一种起重机制动距离的测量方法,其特征在于,包括:
S1:将所述标记单元设置在所述卷筒的第一端面上;将所述图像采集单元垂直设置在靠近所述卷筒的第一端面处;
S2:在所述制动器启动单元与所述制动器之间设置所述延时单元;
S3:所述制动器启动单元发出制动信号,所述图像采集单元接收到所述制动信号后开始采集所述卷筒第一端面的实时图像;同时所述制动信号传输至延时单元,所述制动器在制动信号发出后经过一延时后开始制动;
S4:所述图像采集单元在连续采集到两张相同的图像时停止采集;
S5:所述图像采集单元将采集到的图像传输至所述图像处理单元,所述图像处理单元对图像进行处理并得到制动距离数据信号;
S6:所述图像处理单元将所述制动距离数据信号传输至所述显示单元,并通过所述显示单元显示出来。
优选的,所述图像采集单元采集的第一张图像成像时刻与所述制动器开始制动的时刻相同。
在本发明提供的一种起重机制动距离测量装置,通过图像采集单元以及图像处理单元对起重机卷筒在制动前后的位置变化进行记录分析,从而能够解决一般起重机制动距离检测装置无法给出起重机具体制动距离的问题。
附图说明
图1是本发明实施例提供的起重机制动距离测量装置的流程图;
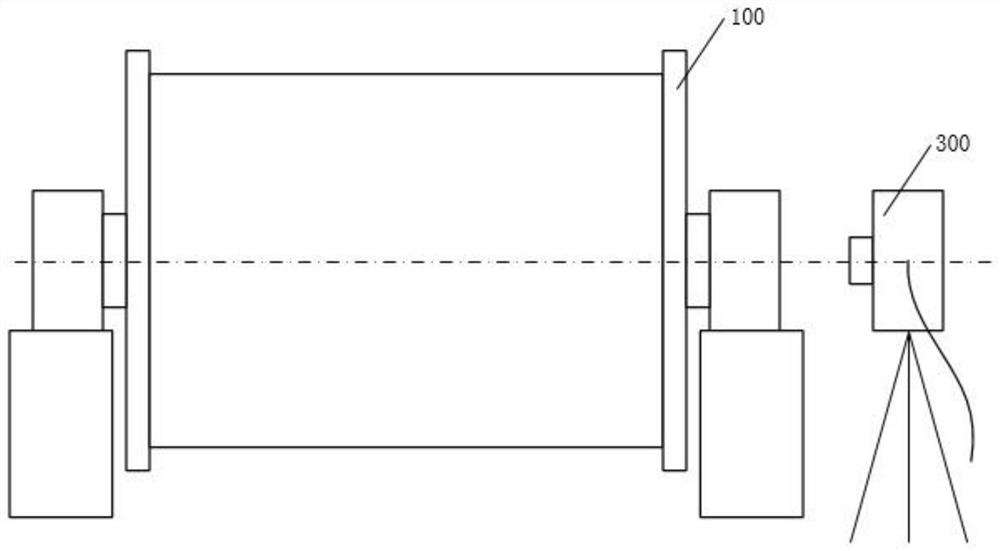
图2是本发明实施例提供的起重机制动距离测量装置的图像采集单元位置示意图;
图3是本发明实施例提供的起重机制动距离测量装置的标记单元位置示意图;
图4是本发明实施例提供的起重机制动距离测量装置的标记单元在刚开始制动时的位置;
图5是本发明实施例提供的起重机制动距离测量装置的标记单元在制动结束时的位置;
图6至图8是本发明实施例提供的起重机制动距离测量装置的图像处理单元处理图像数据的过程图;
图中,
100-卷筒;110-标记单元;200-制动器启动单元;210-制动器;220-延时单元;300-图像采集单元;310-图像处理单元;320-显示单元。
具体实施方式
以下结合附图和具体实施例对本发明提出的一种起重机制动距离测量装置作进一步详细说明。根据下面说明和权利要求书,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
起重机一般包括机架、机构以及控制系统,所述机构包括起升机构以及运行机构,所述控制系统包括制动器启动单元200,所述起升机构用于控制重物上升或者下降,所述起升机构包括一卷筒100。所述控制系统发出信号至所述机架以及机构来控制所述机架以及机构的工作状态,所述卷筒100绕其中心轴可旋转,所述卷筒旋转带动牵引绳,从而带动重物的运动。所述卷筒100上还设置有制动器210。当所述卷筒100处于旋转状态时,所述牵引绳带动重物上升或者下降,所述制动器启动单元200发出制动信号,所述制动器210接收到制动信号后所述卷筒100开始制动,所述卷筒100逐渐停止旋转,所述重物也停止上升或者下降,制动过程结束。制动中,所述卷筒100转过的角度一般小于360度。
现有技术公开了一种起重机起升机构下降制动距离的在线检测装置及方法,但该装置的结构复杂,安装过程较为繁琐,不利于实际操作,且所述装置无法给出起重机的具体制动距离数据,这就导致发明人无法根据制动距离来预测起重机的制动系统的详细状态。
基此,本发明的核心思想在于利用图像采集单元300对所述卷筒100在制动过程中转过的角度进行测量,通过图像处理单元310的分析计算得到起重机的制动距离,从而能够解决无法得出起重机具体制动距离的问题。
具体的,请参考图1,其为本发明实施例的示意图。如图1所示,一种起重机制动距离测量装置,其特征在于,包括标记单元110、图像采集单元300、图像处理单元310;所述标记单元110设置于起重机卷筒100的第一端面上;所述图像采集单元300与所述制动器启动单元200通信连接,所述图像采集单元300用于采集所述起重机制动过程中所述卷筒100第一端面的实时图像,并将所述实时图像传输至所述图像处理单元310;所述图像处理单元310用于根据所述实时图像获取所述起重机的制动距离。
所述卷筒100的端面一般并无明显的标记,所述图像处理单元310在对所述图像采集单元300采集的图像进行处理时,无法进行精准的特征捕捉,从而导致处理结果的误差增大。因此,发明人在所述卷筒100的第一端面设置了标记单元110(所述第一端面可选取所述卷筒的任一端面),所述标记单元110包括一系列形状各不相同的标记。当所述卷筒100转动时,所述标记单元110会随着所述卷筒100一起转动,且与所述卷筒100始终保持相对静止的状态。所述图像处理单元310可捕捉所述卷筒100端面图像上的所述标记的位置,通过制动前后所述标记单元110的位置变化计算得出所述卷筒100制动过程转过的角度,进一步得出起重机的制动距离。
优选的,所述标记单元110沿所述卷筒100的所述第一端面周向等间隔设置。使所述标记均匀分布在所述第一端面上,使所述卷筒100更加美观的同时,便于所述图像处理单元310得到多组数据并求得其平均值,减少测量误差。
进一步的,所述标记单元110的不同标记上还设置有一便于识别几何中心的图形,以便于所述图像处理单元将所述标记位置简化成一个点,从而减少测量误差。所述图形可以采取“一”字形、圆形或者长方形等。
为了保证所述图像采集单元300能准确地采集到所述卷筒100开始制动时的第一张图像,发明人还设置了一个延时单元220,所述延时单元220设置在所述制动器210以及所述制动器启动单元200之间,并与二者通信连接。在本发明提供的实施例中,所述图像采集单元300设置为一工业相机,所述工业相机在收到制动信号后开始进行图像采集,但是所述图像采集单元300在收到制动信号到第一张图像成像之间右一个延迟时间,所述制动器210在收到制动信号到进行制动的延迟时间要远远小于图像采集单元300成像的延迟时间,且基本可以忽略。如若不设置所述延时单元220,所述图像采集单元300采集的第一张图片为制动过程中的一张照片,而不是制动开始时的照片。这样会导致测量的制动距离小于实际的制动距离。为了准确的测量出制动距离,所述延时单元220的延时时长设置为所述图像采集单元300的成像时间。所述制动器启动单元200发出制动信号,经过延时单元220的延时后,在所述图像采集单元300成像时开始制动。从而保证了所述图像采集单元300成像时刻与所述制动器210制动时刻同步。
此外,为了使所述测量结果直观的显示出来,所述起重机制动距离测量装置还包括一显示单元320,所述显示单元320与所述图像处理单元310通信连接;所述显示单元320用于显示所述图像处理单元310的处理结果。
基此,利用本实施例提供的起重机制动距离测量装置的具体方法如下:
首先,将所述标记单元110设置在所述卷筒100的第一端面上,并将所述图像采集单元300垂直设置在靠近所述卷筒100的第一端面处,以保证所述图像采集单元300采集到的图像不会产生大小畸变,保证图像各位置的比例相同;
其次,在所述制动器启动单元200与所述制动器210之间设置所述延时单元220,保证所述图像采集单元300采集到的第一张图像记录的是制动开始时所述卷筒100的状态;
制动开始时,所述制动器启动单元200发出制动信号,所述图像采集单元300接收到所述制动信号后开始采集所述卷筒100第一端面的实时图像;同时所述制动信号传输至延时单元220,所述制动器210在制动信号发出后经过一延时后开始制动;
所述图像处理单元310接收所述图像采集单元300发送的图像数据,所述图像处理单元310首先比较所接收的图像数据与前一图像数据,若不一致,则所述图像采集单元300继续采集数据;若一致,则判定所述卷筒100停止运动,所述图像采集单元300停止采集数据。将最初的图像数据记为D
进一步的,所述图像处理单元310得出角度θ的算法为:
1’:对所述标记单元110的不同标记进行标号1,2,3······。
2’:处理所述图像数据D
3’:处理所述图像数据D
4’:将没有相同下标的数据剔除,将具有相同下标的n组数据放在一起,记为M
5’:从M
6’:对每一组数据M
7’:则θ=(θ
随后,测出所述卷筒100的牵引绳缠绕直径,将其记为D
最后,所述图像处理单元310将所述起重机制动距离信号传输至所述显示单元320,并通过所述显示单元320显示出来。
综上可见,在本发明提供的一种起重机制动距离测量装置,通过图像采集单元300以及图像处理单元310对起重机卷筒100在制动前后的位置变化进行记录分析,从而能够解决一般起重机制动距离检测装置无法给出起重机具体制动距离的问题。
上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
- 一种起重机制动距离测量装置
- 一种起重机械制动方法和起重机械制动装置