一种相互平衡的液压石油举升装备液压系统控制方法
文献发布时间:2023-06-19 12:24:27
技术领域
本发明属于油田石油举升设备技术领域,特别涉及一种相互平衡的液压石油举升装备液压系统。
背景技术
目前国内外使用的地面举升设备主要有三大类:①游梁式抽油机;②无游梁式抽油机;③多功能机。
1)常规游梁式抽油机由驴头、支架、游梁、连杆、曲柄、减速箱、电动机、电控柜、底座等部分组成,其工作原理是,电动机带动减速箱,减速箱带动曲柄连杆将旋转运动变成驴头悬点的往复运动,依靠光杆和抽油杆的传递,驱动井下抽油泵作固定周期的上下往复运动,把井下的油送到地面。其优点是:结构简单、可靠性高、操作简便,维修费用低;特别适用于全天候野外恶劣环境连续运转。其缺点是:平衡效果差、效率低;冲程小,动载大;运动形式单一,最大加点速度和最高速度大;如果冲程加大则体积和重量增加很大。
2)无游梁式抽油机主要包括:链条式抽油机、宽带型滚筒抽油机、曲柄连杆式抽油机。
链条式抽油机由电动机、减速箱、链条、往返架、平衡箱、滚筒、机架、底座、塔基等部分组成,其工作原理是,链传动在塔架内垂直布置,轨迹链条挂在上下链轮上,在下链轮的驱动下作长环形运动。其优点是:匀速运动、速度低、时间长,其振动载荷相对于游梁机低,符合皮带具有减震吸震功能,减少了振动载荷对抽油杆和泵的疲劳伤害,折叠式结构,易运输。
宽带型滚筒抽油机是将常规游梁式抽油机复杂的四连杆运动全部集中到高效传动系统上,其特点是:结构相对简单、安装方便,安全可靠,维护保养费用低。
曲柄连杆式抽油机其工作原理是:由电动机带动减速器,通过曲柄、连杆、横梁、绕在绳轮上的柔性件、悬绳器及光杆,带动抽油泵柱塞作上、下往复运动。其特点是:调节连杆与曲柄的连接位置,可在一定范围内调节冲程长度。调节可调螺杆,可以移动支架位置,以便对中井口或让开井口便于修井作业。
无游梁式抽油机因其结构复杂,存在体积、高度受限,维护保养费力,更换零部件较为费力等问题。
发明内容
本发明就是针对上述问题,提供一种液压系统控制方法,通过主机交替为两口井抽油杆提供向下的动力,达到节能的目的。
为了实现本发明的上述目的,本发明采用如下技术方案,本发明的控制系统包括:第一主机、第一位移传感器、第二位移传感器、第二主机、电气控制部分、第二压力传感器、液压控制部分、第一压力传感器,其特征在于:所述第一主机的上腔A1接口与液压控制部分的A1接口相连,第一主机的下腔A2接口与液压控制部分的A2接口相连;第二主机的上腔B1接口与液压控制部分的B1接口相连,第二主机的下腔B2接口与液压控制部分的B2接口相连;液压控制部分的A2与B2接口在内部相通;当液压控制部分通过A1接口向第一主机的上腔供油推动其下行,同时第一主机的下腔液压油通过液压控制部分的A2与B2连通接口,给第二主机的下腔供油推动其上行;当液压控制部分通过B1接口向第二主机的上腔供油推动其下行,同时第二主机的下腔液压油通过液压控制部分的A2与B2连通接口,给第一主机的下腔供油推动其上行。
第一位移传感器的W1信号发射端与电气控制部分的W1的PLC模拟量信号接收端相连,同时电气控制部分将处理完成的位移信号通过W1′传送给液压控制部分的W1′;第二位移传感器的W2信号发射端与电气控制部分的W2的PLC模拟量信号接收端相连,同时电气控制部分将处理完成的位移信号通过W2′传送给液压控制部分的W2′;当第一主机内部的活塞杆下移到第一位移传感器设定的位置时,第一位移传感器通过W1将位移信号传送给电气控制部分的PLC可编程控制器,运行预先设置好的程序,通过电气控制部分的W1′,将结果输出给液压控制部分的W1′,使第一主机停止下行,同时第二主机开始下行;同理,当第二主机内部的活塞杆下移到第二位移传感器设定的位置时,第二位移传感器通过W2将位移信号传送给电气控制部分的PLC可编程控制器,运行预先设置好的程序,通过电气控制部分的W2′,将结果输出给液压控制部分的W2′,使第二主机停止下行,同时第一主机开始下行;当第一主机与第二主机相连通的下腔液压油减少或增加时,两台主机的相对位移发生变化,第一位移传感器和第二位移传感器将位移信号反馈给电气控制部分的PLC可编程控制器,运行预先设置好的程序,将结果输出给液压控制部分,对第一主机和第二主机下腔进行补油或放油。
第一压力传感器的Y1信号发射端与电气控制部分的Y1的PLC模拟量信号接收端相连,同时电气控制部分将处理完成的压力信号通过Y1′传送给液压控制部分的Y1′;第二压力传感器的Y2信号发射端与电气控制部分的Y2的PLC模拟量信号接收端相连,同时电气控制部分将处理完成的压力信号通过Y2′传送给液压控制部分的Y2′;当第一主机上腔压力超过设定值时,第一压力传感器通过Y1将压力信号传送给电气控制部分的PLC可编程控制器,运行预先设置好的程序,通过电气控制部分的Y1′,将结果输出给液压控制部分的Y1′,使第一主机和第二主机停止运行;同理,当第二主机上腔压力超过设定值时,第二压力传感器通过Y2将压力信号传送给电气控制部分的PLC可编程控制器,运行预先设置好的程序,通过电气控制部分的Y2′,将结果输出给液压控制部分的Y2′,使第一主机和第二主机停止运行。
作为本发明的一种优选方案,本发明还包括第三压力传感器、第三压力传感器的Y3信号发射端与电气控制部分的Y3的PLC模拟量信号接收端相连,同时电气控制部分将处理完成的压力信号通过Y3′传送给液压控制部分的Y3′;当第一主机和第二主机连通的下腔压力超过设定值时,第三压力传感器通过Y3将压力信号传送给电气控制部分的PLC可编程控制器,运行预先设置好的程序,通过电气控制部分的Y3′,将结果输出给液压控制部分的Y3′,使第一主机和第二主机停止运行。
本发明的有益效果:本发明通过液压和电器系统控制,实现了一台主机下行的同时,将下腔产生的压力能直接转化为另一台主机的重力势能,推动其上行,两台主机交替完成抽油动作,实现了节能的效果。
附图说明
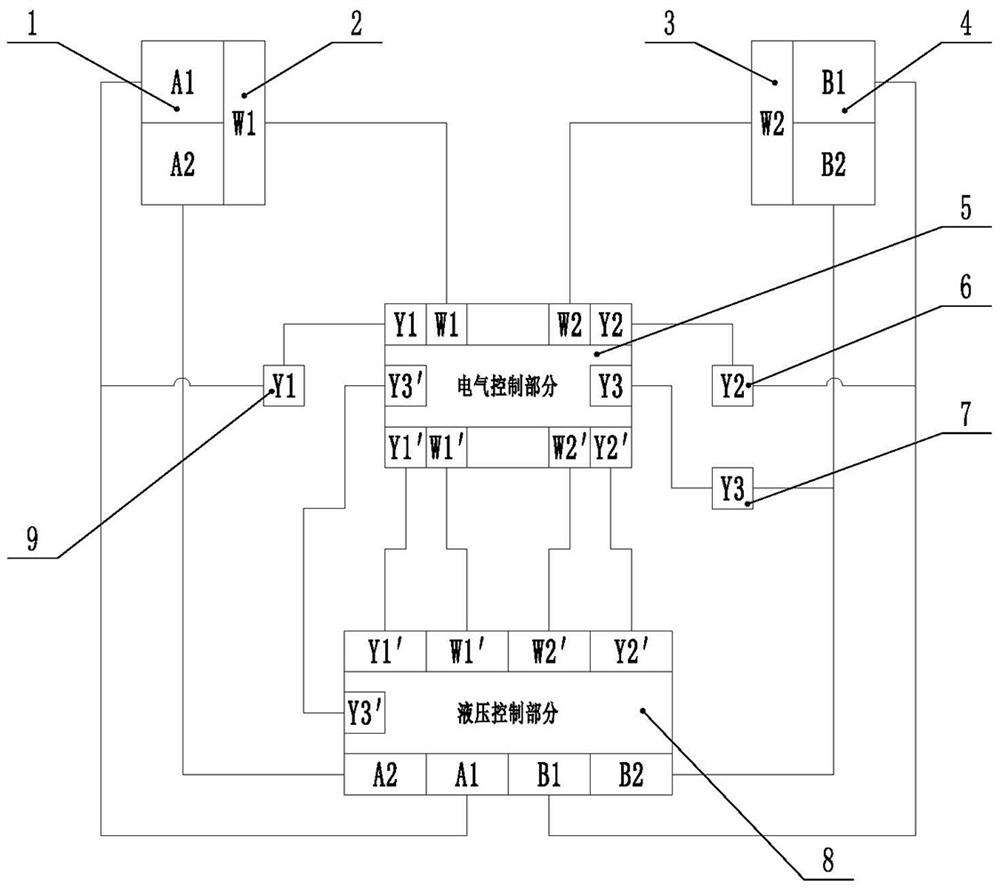
图1是本发明的原理图。
具体实施方式
本发明的控制系统包括:第一主机1、第一位移传感器2、第二位移传感器3、第二主机4、电气控制部分5、第二压力传感器6、液压控制部分8、第一压力传感器9,其特征在于:所述第一主机1的上腔A1接口与液压控制部分8的A1接口相连,第一主机1的下腔A2接口与液压控制部分8的A2接口相连;第二主机4的上腔B1接口与液压控制部分8的B1接口相连,第二主机4的下腔B2接口与液压控制部分8的B2接口相连;液压控制部分8的A2与B2接口在内部相通;当液压控制部分8通过A1接口向第一主机1的上腔供油推动其下行,同时第一主机1的下腔液压油通过液压控制部分8的A2与B2连通接口,给第二主机4的下腔供油推动其上行;当液压控制部分8通过B1接口向第二主机4的上腔供油推动其下行,同时第二主机4的下腔液压油通过液压控制部分8的A2与B2连通接口,给第一主机1的下腔供油推动其上行;
第一位移传感器2的W1信号发射端与电气控制部分5的W1的PLC模拟量信号接收端相连,同时电气控制部分5将处理完成的位移信号通过W1′传送给液压控制部分8的W1′;第二位移传感器3的W2信号发射端与电气控制部分5的W2的PLC模拟量信号接收端相连,同时电气控制部分5将处理完成的位移信号通过W2′传送给液压控制部分8的W2′;当第一主机1内部的活塞杆下移到第一位移传感器2设定的位置时,第一位移传感器2通过W1将位移信号传送给电气控制部分5的PLC可编程控制器,运行预先设置好的程序,通过电气控制部分5的W1′,将结果输出给液压控制部分8的W1′,使第一主机1停止下行,同时第二主机4开始下行;同理,当第二主机4内部的活塞杆下移到第二位移传感器3设定的位置时,第二位移传感器3通过W2将位移信号传送给电气控制部分5的PLC可编程控制器,运行预先设置好的程序,通过电气控制部分5的W2′,将结果输出给液压控制部分8的W2′,使第二主机4停止下行,同时第一主机1开始下行;当第一主机1与第二主机4相连通的下腔液压油减少或增加时,两台主机的相对位移发生变化,第一位移传感器2和第二位移传感器3将位移信号反馈给电气控制部分5的PLC可编程控制器,运行预先设置好的程序,将结果输出给液压控制部分8,对第一主机1和第二主机4下腔进行补油或放油。
第一压力传感器9的Y1信号发射端与电气控制部分5的Y1的PLC模拟量信号接收端相连,同时电气控制部分5将处理完成的压力信号通过Y1′传送给液压控制部分8的Y1′;第二压力传感器6的Y2信号发射端与电气控制部分5的Y2的PLC模拟量信号接收端相连,同时电气控制部分5将处理完成的压力信号通过Y2′传送给液压控制部分8的Y2′;当第一主机1上腔压力超过设定值时,第一压力传感器9通过Y1将压力信号传送给电气控制部分5的PLC可编程控制器,运行预先设置好的程序,通过电气控制部分5的Y1′,将结果输出给液压控制部分8的Y1′,使第一主机1和第二主机4停止运行;同理,当第二主机4上腔压力超过设定值时,第二压力传感器6通过Y2将压力信号传送给电气控制部分5的PLC可编程控制器,运行预先设置好的程序,通过电气控制部分5的Y2′,将结果输出给液压控制部分8的Y2′,使第一主机1和第二主机4停止运行。
作为本发明的一种优选方案,本发明还包括第三压力传感器7、第三压力传感器7的Y3信号发射端与电气控制部分5的Y3的PLC模拟量信号接收端相连,同时电气控制部分5将处理完成的压力信号通过Y3′传送给液压控制部分8的Y3′;当第一主机1和第二主机4连通的下腔压力超过设定值时,第三压力传感器7通过Y3将压力信号传送给电气控制部分5的PLC可编程控制器,运行预先设置好的程序,通过电气控制部分5的Y3′,将结果输出给液压控制部分8的Y3′,使第一主机1和第二主机4停止运行。
可以理解的是,以上关于本发明的具体描述,仅用于说明本发明而并非受限于本发明实施例所描述的技术方案,本领域的普通技术人员应当理解,仍然可以对本发明进行修改或等同替换,以达到相同的技术效果;只要满足使用需要,都在本发明的保护范围之内。
- 一种相互平衡的液压石油举升装备液压系统控制方法
- 一种平衡组阀、举升液压系统及消防车