承受垂向载荷的平面机械臂
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及一种承受垂向载荷的平面机械臂。
背景技术
传统的吊装机械臂在垂直面内运动,承受的重量载荷也在垂直面内,即平面机械臂承受平面内的载荷;载重状态机械臂的驱动元件为作动器,其动力臂较大,受转轴摩擦力影响较小。在空间受限的情况下,需要在水平面内完成承受垂直重量载荷的机械臂,如何减小转轴摩擦力并提高驱动力矩,是本领域技术人员需要解决的一个技术难题。
发明内容
为解决上述问题,本发明提供一种承受垂向载荷的平面机械臂,其旋转摩擦力小、驱动力矩大、能实现在小空间内承受较大垂向力的平面相对转动。
为实现上述目的,本发明采用的技术方案是:承受垂向力的平面机械臂,包括两叉机械臂、三叉机械臂、销轴、旋转驱动件、啮合的大齿轮和小齿轮,大齿轮和销轴与三叉机械臂固定连接,与小齿轮相连的旋转驱动件设置在两叉机械臂上,销轴上设置有轴承组,两叉机械臂通过轴承组与三叉机械臂转动连接。
轴承组包括一套或两套轴承组件,每套轴承组件只承受径向力或者轴向力,或同时承受径向力和轴向力。
每套轴承组件包括一个以上轴承。
旋转驱动件是电机、液压马达、电机和减速机的组合或液压马达和减速机的组合。
大齿轮为扇形齿轮。
发明的有益效果
本发明采用旋转驱动件和传动齿轮控制两叉机械臂和三叉机械臂的相对转动,两叉机械臂和三叉机械臂通过轴承组实现轴向定位和减小相对旋转的摩擦力,结构简单,驱动力矩大,使用方便,实现在小空间内承受垂向力的平面相对转动。
附图说明
图1是本发明的示意图;
图2是双向承载轴承组的结构示意图;
图3是单向承载轴承组的结构示意图;
图4是两个机械臂展开至极限位置的示意图;
图5是本发明应用状态示意图。
具体实施方式
下面将结合附图,对本发明的技术方案进行清晰、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部。
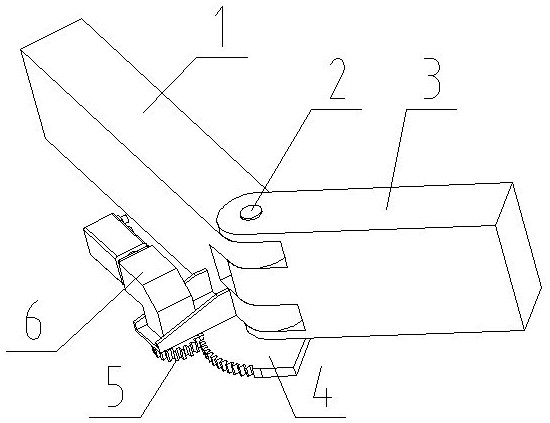
如图1-4所示,承受垂向力的平面机械臂,包括两叉机械臂1、销轴2、三叉机械臂3、大齿轮4、小齿轮5、旋转驱动件6和轴承组7。与小齿轮5相连的旋转驱动件6设置在两叉机械臂1上,大齿轮4固定在三叉机械臂3上,三叉机械臂3与销轴2固定连接,与小齿轮5啮合的大齿轮4为扇形齿轮。轴承组7设置在销轴2上,两叉机械臂1通过轴承组7与三叉机械臂3以销轴2为连接铰点相对转动。旋转驱动件6可采用电机、液压马达、电机和减速机的组合或者液压马达和减速机的组合。图2中,连接两叉机械臂1与三叉机械臂3的销轴2上设置的轴承组7包括两套相同的轴承组件,每套轴承组件包括外圈端盖71、外套72、防尘圈73、两个角接触球轴承74、内套75;外套72内侧与角接触球轴承74的外圈配合,外套72的外圆面和端面分别与两叉机械臂1配合;内套75的内外圆表面分别与销轴2和角接触球轴承74的内圈配合,内套75的端面与三叉机械臂3接触,实现两叉机械臂1与三叉机械臂3的轴向定位。轴承组7传递两叉机械臂1与三叉机械臂3之间的轴向力,同时传递销轴2与两叉机械臂1之间的径向力,由于销轴2与三叉机械臂3固定连接,因此轴承组7同时传递两叉机械臂1与三叉机械臂3间的轴向力和径向力。两套轴承组件对称使用,使两叉机械臂1与三叉机械臂3可以双向受力,并可以相对转动。图3中,连接两叉机械臂1与三叉机械臂3的销轴2上设置的轴承组7包括一套轴承组件和两个关节轴承76;该轴承组件包括外圈端盖71、外套72、防尘圈73、三个角接触球轴承74、内套75;外套72内圆面与角接触球轴承74的外圈配合,外套72端面与两叉机械臂1的端面接触;内套75外圆面与角接触球轴承74的内圈配合,内套75端面与三叉机械臂3的端面接触;轴承组件传递两叉机械臂1与三叉机械臂3间的轴向力。关节轴承76安装在两叉机械臂1内孔中,通过挡圈77定位,关节轴承76外圈与两叉机械臂1配合,其内圈与销轴2配合,由于销轴2与三叉机械臂3固定连接,因此关节轴承76传递两叉机械臂1与三叉机械臂3之间的径向力。通过一套轴承组件和两个关节轴承76的配合使用,使两叉机械臂1与三叉机械臂3可以单向受力,并可以相对转动。每套轴承组件中的轴承也可以是一个。
如图5所示,三叉机械臂3固定安装在基座9上,两叉机械臂1前端挂有重物8,两叉机械臂1与三叉机械臂3相对旋转,带动重物8作平面运动。
- 承受垂向载荷的平面机械臂
- 一种免除轴承承受轴向载荷的方法及平面滑动摩擦付结构