位置定位装置、速度测量装置及位置定位方法
文献发布时间:2023-06-19 18:27:32
技术领域
本发明的实施方式涉及位置定位装置、速度测量装置及位置定位方法。
背景技术
对于面向铁路的自动驾驶,要求同时进行位置定位和速度测量的装置及高精度化。在列车的位置定位中,一般进行基于通过了地面信标的信号区间内的在线探测。另外,在速度测量中,一般使用通过速度发电机(测速发电机,以下记为TG)进行的频率转换来测量速度的方法。
另外,也有使用从人造卫星发送的定位用电波信号进行定位的方法,但在该情况下,在铁路沿线环境中,由于多路径等问题,测量精度最大为±10m,作为面向自动驾驶的位置定位来说测量精度较低。另外,在隧道、桥上车站站房等高架下、地下区间等卫星不能接收区域也可能不能掌握行驶位置。
现有技术文献
专利文献
专利文献1:日本特开2010-100239号公报
专利文献2:日本专利第5973024号公报
专利文献3:日本专利第4121897号公报
专利文献4:日本专利第5185575号公报
发明内容
发明所要解决的课题
提供能够进一步提高测量精度的位置定位装置、速度测量装置及位置定位方法。
用于解决课题的手段
根据实施方式的位置定位装置是对车辆的位置进行定位的位置定位装置,具备第一定位部、第二定位部和判别部。第一定位部接收来自卫星的定位用信号,对车辆的第一位置进行定位。第二定位部基于独立定位用传感器的输出,对车辆的第二位置进行定位。在第一位置处于基于规定的位置的范围内的情况以及车辆的行进方向的变化为规定量的情况中的至少一方的情况下,判别部将第二位置设为所述车辆的位置。
附图说明
图1是第一实施方式的行驶位置探测系统10的概要结构框图。
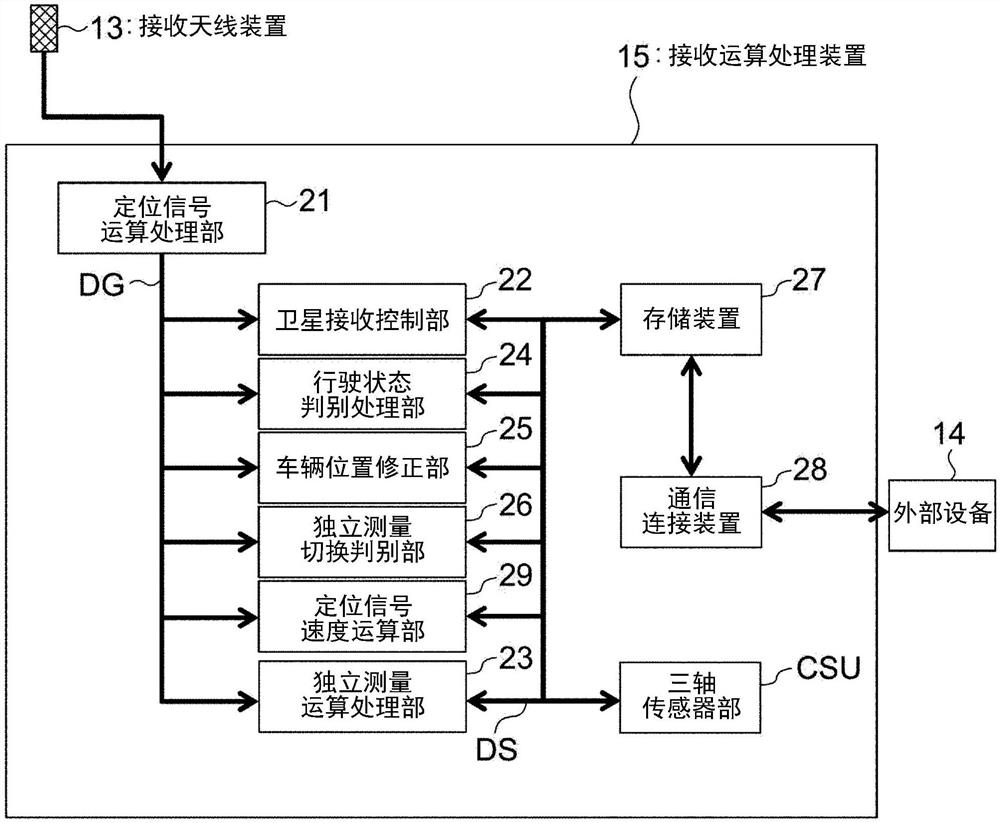
图2是第一实施方式的接收运算处理装置的功能结构框图。
图3是第一实施方式的定位信号运算处理部的处理流程图。
图4是示意性地表示设定了不可见区域的情况下的处理环境的图。
图5是卫星接收控制处理及独立测量切换判别处理的处理流程图(之一)。
图6是分支处理A的流程图。
图7是分支处理D的流程图。
图8是卫星接收控制处理及独立测量切换判别处理的处理流程图(之二)。
图9是示意性地表示通过定位用电波信号探测不可见区域的情况下的处理环境的图。
图10是另一分支处理D的流程图。
图11是使用图10所示的处理的情况下的流程图。
图12是示意性地表示根据地图数据及定位用电波信号的信息切换为不可见区域的情况下的处理环境的图。
图13是又一分支处理D的流程图。
图14是使用图13所示的处理的情况下的流程图。
图15是接收卫星控制处理的处理流程图。
图16是定位用信息的接收状态的说明图。
图17是表示速度测量的情况下的接收有效区7及接收无效区的设定例的图。
图18是人造卫星的选择处理的说明图。
图19是仰角控制的说明图。
图20是行驶状态判别处理部的处理流程图。
图21是车辆位置修正部的处理流程图。
图22是第二实施方式的接收运算处理装置的功能结构框图。
图23是车辆路径预测运算部的处理流程图(之一)。
图24是车辆路径预测运算部的处理流程图(之二)。
图25是车辆路径预测运算部的处理流程图(之三)。
具体实施方式
以下,参照附图对本发明的实施方式进行说明。此外,在本说明书所附的附图中,为了便于容易地进行图示和理解,适当使比例尺及纵横的尺寸比等相对于实物的这些要素进行了变更、夸大。
<第一实施方式>
图1是第一实施方式的行驶位置探测系统10的概要结构框图。行驶位置探测系统10搭载于铁路车辆11,能够基于从人造卫星(以下有时称为定位卫星)12-1~12-4的发射器发送的定位用电波信号SX1~SX4进行定位。该行驶位置探测系统10具备接收天线装置13、外部设备14和接收运算处理装置(位置定位装置)15。此外,在本实施方式中,将以n=4对人造卫星12-1~12-n进行说明,但并不限定于此。例如,n也可以是5以上的自然数。
接收天线装置13是可接收定位用电波信号SX1~SX4的天线装置。外部设备14是基于定位结果进行铁路车辆11的行驶控制的设备,例如是列车综合管理装置(TCMS)、面向自动驾驶的驾驶员辅助控制装置、车上监视器。接收运算处理装置15基于接收天线装置13所输出的定位用电波信号SX1~SX4进行定位处理,并向外部设备14输出定位结果。
图2是表示第一实施方式的接收运算处理装置15的结构例的框图。接收运算处理装置15具有定位信号运算处理部(第一定位部)21、卫星接收控制部22、独立测量运算处理部(第一测量部)23、行驶状态判别处理部24、车辆位置修正部(第二定位部)25、独立测量切换判别部(判定部)26、存储装置27、通信连接装置28和定位信号速度运算部(第二测量部)29。在图2中还图示了三轴传感器部CSU。三轴传感器部CSU例如是包含三轴加速度传感器、三轴陀螺仪传感器及三轴地磁传感器的三轴传感器。
定位信号运算处理部21基于接收天线装置13所接收的定位用电波信号SX1~SX4运算铁路车辆11的位置坐标,并输出定位数据组DG。在定位数据组DG中,包含时刻、定位用电波信号SX1~SX4所包含的卫星轨道信息(例如卫星历书信息及卫星星历信息)、定位用电波信号SX1~SX4的接收信号强度以及铁路车辆11的位置坐标等。
卫星接收控制部22基于定位数据组DG所包含的来自人造卫星12-1~12-4的定位用电波信号SX1~SX4及其信号强度,进行推定位置误差的运算处理。由此,卫星接收控制部22基于所获得的推定运算误差,进行对应的卫星接收仰角及接收强度等的接收控制。关于卫星接收控制部22的具体情况,将随后使用图15~图19进行描述。
独立测量运算处理部23基于三轴传感器部CSU的输出,输出独立定位数据组DS。在独立定位数据组DS中,包含时刻、速度、三轴方向的行驶矢量等。即,该独立测量运算处理部23使用一般的运算方法对速度、三轴方向的行驶矢量进行运算处理。例如,三轴方向的行驶矢量通过基于三轴加速度传感器的输出对三轴方向的加速度进行时间累计来运算。另外,速度例如能够作为三轴方向的行驶矢量的绝对值进行运算。
行驶状态判别处理部24主要使用独立定位数据组DS,判别铁路车辆11的行驶状态(例如在行驶状态中包含速度信息、表示停止状态的信息)。关于行驶状态判别处理部24的详细的处理例,将随后使用图20进行描述。
车辆位置修正部25使用独立定位数据组DS的信息,对基于定位数据组DG的铁路车辆11的位置坐标进行修正运算,并输出铁路车辆11的位置信息。即,车辆位置修正部25使用独立定位数据组DS的信息,运算从基准位置开始的铁路车辆11的位置坐标的时间序列变化。该基准位置是指过去进行了定位或独立运算的位置的平均位置。例如,基准位置是通过了同一地面信标时的定位位置的过去十次的平均值。另外,关于车辆位置修正部25的详细的处理例,将随后使用图21进行描述。
独立测量切换判别部26根据定位用电波信号SX1~SX4的电波状态及铁路车辆11的位置中的至少某一方,判别将定位信号运算处理部21所输出的位置坐标及车辆位置修正部25所输出的位置坐标中的哪一个设为铁路车辆11的位置坐标。例如,独立测量切换判别部26使用定位数据组DG,判别铁路车辆11是否存在于不能捕捉人造卫星12-1~12-4的环境下,在存在于不能捕捉人造卫星12-1~12-4的环境下的情况下,自动向主要使用车辆位置修正部25所输出的位置坐标的独立测量处理切换。
另外,独立测量切换判别部26将表示是主要使用定位信号运算处理部21所输出的位置坐标的定位运算状态(状态1)、主要使用车辆位置修正部25所输出的位置坐标的独立测量处理状态(状态2)中的哪一个的信息与时刻一起存储于存储装置27。
存储装置27例如通过RAM(Random Access Memory:随机存取存储器)、快闪存储器等半导体存储元件、硬盘、光盘等实现。存储装置27存储各种信息。
通信连接装置28在存储装置27和外部装置14之间进行通信。
定位信号速度运算部29使用定位用电波信号SX1~SX4的电波运算铁路车辆11的速度。在铁路车辆11中,有时在加速时及减速时进行空转滑行。因此,与基于通过铁路车辆11的速度发电机(测速发电机)进行的频率转换的速度相比,使用电波运算出的速度一般来说精度更高。
定位信号速度运算部29例如通过从人造卫星12-1~12-4输出的载波的多普勒效应来运算铁路车辆11的速度。因为人造卫星12-1~12-4的载波频率(L1频带fs=1.5754GHz)是被严格地管理的,所以测量该频率并通过式(1)运算速度V。另一方面,因为人造卫星12-1~12-4是高速移动的,所以仅通过一个人造卫星的载波频率是不能求出对地速度的。因此,测定来自多个(例如四个以上)人造卫星12-1~12-4的载波频率,运算对地速度。另外,与定位信号运算处理部21同样地,如果铁路车辆11通过不可见区域,则不能使用载波频率测量速度。
以上是行驶位置探测系统10的结构的说明,接下来对各结构部的动作进行说明。
首先,基于图3对定位信号运算处理部21及独立测量运算处理部23的处理例进行说明。图3是第一实施方式的定位信号运算处理部21的处理流程图。
接收运算处理装置15的定位信号运算处理部21经由接收天线装置13接收定位用电波信号SX1~SX4(步骤S11)。
接着,定位信号运算处理部21从定位用电波信号SX1~SX4中提取并获取时刻信号(步骤S12)。接着,定位信号运算处理部21基于卫星轨道信息(例如,卫星历书信息及卫星星历信息)以及所获得的时刻信号,获取包含纬度信息及经度信息的位置信息(步骤S13)。
在此,对位置信息的获取方法的具体情况进行说明。定位信号运算处理部21例如使用来自人造卫星12-1~12-4的轨道信息计算铁路车辆11的位置坐标(x、y、z)。即,能够通过将人造卫星12-1~12-4的位置和这一瞬间的人造卫星12-1~12-4与接收运算处理装置15之间的距离设为集合的信息,计算铁路车辆11的位置坐标(x、y、z)。在该情况下,如果人造卫星的位置和这一瞬间的人造卫星与接收运算处理装置15之间的距离的信息的集合为三个以上,则能够计算坐标(x、y、z)。而且,为了保证时刻的准确,一般需要第四颗卫星。
更详细而言,定位信号运算处理部21基于卫星轨道信息(例如,卫星历书信息及卫星星历信息)以及所获得的时刻信号,通过以下所示的(2)式计算铁路车辆11的位置坐标(x、y、z)。
在(2)式中,(x、y、z)是想要求出的位置的坐标值的参数,(x
接着,定位信号运算处理部21基于运算结果获取定位卫星数(步骤S14)。而且,定位信号运算处理部21基于卫星历书信息计算定位卫星仰角,并且从接收天线装置13获取接收到定位用电波信号SX1~SX4时的接收强度的信息(步骤S15)。例如,定位信号运算处理部21能够根据人造卫星12-1~12-4的位置和铁路车辆11的位置坐标(x、y、z)的关系计算定位卫星仰角。
接着,定位信号运算处理部21获取定位卫星方向角(步骤S16)。例如,定位信号运算处理部21能够根据人造卫星12-1~12-4的位置、铁路车辆11的位置坐标(x、y、z)以及铁路车辆11的方向之间的关系计算定位卫星方向角。而且,定位信号运算处理部21获取其它卫星接收信息(步骤S17)。定位信号运算处理部21输出包含这些信息的定位数据组DG,并将它们存储于存储装置27。
接着,独立测量运算处理部23从三轴传感器部CSU获取三轴加速度传感器的输出(步骤S18),获取三轴陀螺仪传感器的输出(步骤S19),并获取三轴地磁传感器的输出(步骤S20)。独立测量运算处理部23运算速度、三轴方向的行驶矢量,输出包含这些信息的独立定位数据组DS,并将其与时刻一起存储于存储装置27。此时,车辆位置修正部(第二定位部)25基于独立定位数据组DS运算铁路车辆11的位置坐标,并将其与时刻一起存储于存储装置27。
在此,使用图4~图8,对隧道等引起的定位用电波信号SX1~SX4的接收障碍的发生部位已知的情况下的卫星接收控制部22的卫星接收控制及行驶状态判别处理部24的独立测量切换判别处理的处理例进行说明。以下,对同等的处理标注相同的编号,有时省略说明。
图4是示意性地表示设定了不可见区域B1~B2的情况下的处理环境的图。铁路车辆11在真实空间的线路L1的轨道上行驶。另外,铁路车辆11预先存储了地图上的线路L2的轨道信息和不可见区域B1~B2的信息。另外,在图4中,图示了不可见区域B1~B2以外的区域即GNSS(全球定位卫星系统:Global Navigation Satellite System)区间S1、S3和与不可见区域B1~B2对应的独立测量区间S2。此外,在本实施方式中,不可见区域B1~B2是指产生定位用电波信号SX1~SX4的接收障碍的区域。
图5是卫星接收控制处理及独立测量切换判别处理的处理流程图(之一)。
如图5所示,在本实施方式中,首先,行驶状态判别处理部24获取定位数据组DG所包含的定位卫星仰角及接收强度(步骤S31)。
接着,定位信号运算处理部21运算推定位置误差,行驶状态判别处理部24获取推定位置误差(步骤S32)。定位信号运算处理部21运算PDOP(卫星的几何配置引起的精度降低率)值作为测距精度。
DOP(Dilution of Precision:精度衰减因子)是将卫星的配置状态指标化的参数,DOP值表示与定位精度的相关关系比卫星数高,且值越小则定位精度越高的趋势。在该DOP值中有仅将卫星的几何配置的水平分量指标化的HDOP(Horizontal DOP:水平分量精度因子)、仅将垂直分量指数化的VDOP(Vertical DOP:高程精度因子)、将它们合成的PDOP(Position DOP:空间位置精度因子)等。在本实施方式中,在通常测量中使用PDOP值。另一方面,在对“高度”要求高精度的情况下,也可以使用VDOP值。另外,行驶状态判别处理部24有时使用定位信号运算处理部21所运算的EHPE(推定水平定位精度)作为推定位置误差值。
接着,行驶状态判别处理部24基于所获取的铁路车辆11的行进方向设定接收方位角(步骤S33)。铁路车辆11的行进方向由独立定位运算处理部(第二定位部)23基于来自三轴传感器部CSU的输出信号运算。此外,接收方位角的设定(步骤S33)不必在该阶段进行。
接着,行驶状态判别处理部24比较进行了定位的接收强度db和存储于存储装置27的接收强度的判定阈值db_thr(步骤S34)。
在db_thr<db的情况下(步骤S34的“是”),意味着是接收强度足够强、灵敏度良好的状态,转移到对作为接收对象的卫星的卫星仰角的控制。
接着,行驶状态判别处理部24为了判别是否需要仰角控制,使用从存储装置27读出的规定的PDOP的判定阈值pdop_thr,将其与进行了定位的PDOP值(pdop)比较(步骤S35)。
在pdop≥pdop_thr的情况下(步骤S35的“否”),意味着是位置精度降低率高、精度较差的状态,行驶状态判别处理部24使卫星接收控制部22运算仰角的上限角度及仰角的下限角度(步骤S36),并进行仰角的控制(再设定)(步骤S37)。在该情况下,就仰角的上限角度及仰角的下限角度的运算而言,可列举使用根据存储于存储装置27的规定的仰角和推定位置误差而获得的回归式的参数的方法、使用根据仰角和PDOP值而获得的回归式的参数的方法等。这些方法是提高推定位置误差的关系式,因此,无论使用哪种方法都是可以的。
接着,行驶状态判别处理部24在规定的时间范围内按时间序列以规定的时间范围进行步骤S31和步骤S32的处理,按时间序列获取接收强度及PDOP的值(步骤S38)。然后,行驶状态判别处理部24在经过了规定的时间时,判定是否为db1_thr<db1,div<div_thr且pdop<pdop_thr(步骤S39)。在此,db1是接收强度的平均值,div是接收强度的离散,db1_thr、div_thr分别是接收强度的平均、接收强度的判定阈值。例如,在图4所示的不可见区域B1~B2的前后的区域,接收强度的变动变大,在不可见区域B1~B2内,接收强度降低。因此,通过对接收强度的平均及离散的值进行评价,能够在评价低的情况下避免不可见区域B1~B2的前后、不可见区域B1~B2内的仰角的控制(再设定)。
在db1_thr<db1、div<div_thr、pdop<pdop_thr的情况下(步骤S39的“是”),行驶状态判别处理部24对仰角进行恢复设定,重复从步骤S31开始的处理。在该情况下,判断为位置精度降低率高,且所选择的仰角范围的卫星的信号强度高。因此,变更为作为定位卫星仰角及接收强度的控制值而进行了再设定的仰角的上限角度及仰角的下限角度,重复从步骤S31开始的处理。此时,行驶状态判别处理部24将处于定位运算状态(状态1)这一情况与时刻一起存储于存储装置27。另外,因为判断为位置精度降低率高,且所选择的仰角范围的卫星的信号强度高,所以能够将定位信号运算处理部21运算出的位置坐标及定位信号速度运算部29运算出的速度优先用作铁路车辆11的位置信息。
另一方面,在db1_thr<db1、div<div_thr、但pdop<pdop_thr的情况下(步骤S39的“否”),判断为所选择的仰角范围的卫星的接收信号的质量低,因此使卫星接收控制部22进行仰角的控制(再设定)(步骤S37),重复从步骤S38开始的处理。此外,在db1_thr>db1或div>div_thr的情况下,判断为电波的接收环境差,因此,不进行pdop<pdop_thr的判定,而是待机。
这样,在再设定仰角时,确认卫星的信号强度及卫星的配置状态,在通信状态良好的状态时进行仰角的控制(再设定),因此能够更高精度地进行仰角的上限角度及仰角的下限角度的设定。由此,通过控制仰角的上限角度及仰角的下限角度,能够获得精度更高的定位信号。
另一方面,在db_thr≥db的情况下(步骤S34的“否”),意味着是接收强度弱、灵敏度差的状态,行驶状态判别处理部24转移到对接收强度的控制、独立测量处理的分支处理A。
图6是分支处理A的流程图。如图6所示,行驶状态判别处理部24为了判别是否需要接收强度控制,判别进行了定位的EHPE值(ehpe)是否低于存储于存储装置27的规定的EHPE的判定阈值ehpe_thr(步骤S41)。
在ehpe<ehpe_thr的情况下(步骤S38的“是”),意味着是位置精度降低率低而精度较好、但接收强度差的状况,行驶状态判别处理部24使卫星接收控制部22运算接收强度的上限强度及下限强度(步骤S42),进并行接收强度的控制(再设定)(步骤S43)。
在该情况下,就接收强度的上限值及下限值的运算而言,有使用根据存储于存储装置27的规定的接收强度和推定位置误差而获得的回归式的参数的方法、根据接收强度和EHPE值而获得的回归式的参数等。这些方法是推定位置误差提高的关系式,因此,可以使用任一种方法。
接着,在规定的时间范围内按时间序列进行步骤S31和步骤S32(图4)的处理,按时间序列获取接收强度及EHPE值(ehpe)(步骤S44)。在经过规定的时间后,判定是否为db1_thr<db1、div<div_thr且ehpe<ehpe_thr(步骤S45)。
在db1_thr<db1、div<div_thr且ehpe<ehpe_thr的情况下(步骤S45的“是”)对接收强度进行恢复设定,重复从步骤S31开始的处理。在该情况下,意味着所选择的强度范围的卫星的位置精度降低率低,精度较好。因此,变更为作为控制值而进行了再设定的接收强度,重复从步骤S31开始的处理。此时,行驶状态判别处理部24将处于定位运算状态(状态1)这一情况与时刻一起存储于存储装置27。另外,在所选择的强度范围的卫星的位置精度降低率低、精度较好的情况下,能够将车辆位置修正部25运算出的位置坐标及独立测量运算处理部23运算出的速度优先用作铁路车辆11的位置信息。
另一方面,在db1_thr<db1、div<div_thr、但ehpe<ehpe_thr的数据数不超过规定值的情况下(步骤S45的“否”),意味着所选择的仰角范围的卫星的接收信号的质量低,进行接收强度的控制(再设定)(步骤S43),并重复从步骤S44开始的处理。此外,在db1_thr>db1或div>div_thr的情况下,意味着电波的接收环境差,不进行ehpe<ehpe_thr的判定,而是待机。
这样,在再设定接收强度时,将卫星的信号强度及所选择的强度范围的卫星的位置精度降低率试行规定的期间来进行确认,因此能够更高精度地进行信号强度的上限值及下限值的设定。由此,通过控制信号强度的上限值及下限值,能够获得精度更高的定位信号。
然而,在步骤S34的判别(参照图5)中为db≤db-thr的情况且在步骤S41的判别(参照图6)中为ehpe-thr≤ehpe的情况下,认为处于即使实施接收强度控制及仰角控制双方,推定位置误差也不会改善的状况。即,认为处于定位精度不会提高的状况,因此将定位方法切换为独立测量(步骤S47),转移到独立测量处理(步骤S84)(参照图8)。此时,行驶状态判别处理部24将处于独立测量处理状态(状态2)这一情况与时刻一起存储于存储装置27。由于认为处于即使实施接收强度控制及仰角控制双方,推定位置误差也不会改善的状况,因此,能够将车辆位置修正部25运算出的位置坐标及独立测量运算处理部23运算出的速度优先用作铁路车辆11的位置信息。
另一方面,在步骤S35的判别(图4)中为pdop<pdop_thr的情况下(步骤S35的“是”),因为接收强度足够强,且推定位置误差少,所以在该时刻不需要卫星仰角的控制,转移到分支处理D。
图7是分支处理D的流程图。在此,参照图4,对在不可见区域向独立测量处理切换的处理例进行说明。
铁路车辆11并行地进行定位信号运算处理部21中的使用了定位用电波信号SX1~SX4的铁路车辆11的位置定位和独立定位运算处理部(第二定位部)23中的基于来自三轴传感器部CSU的输出信号的铁路车辆11的位置定位(步骤S610)。
独立测量切换判别部26逐步获取从存储装置27获取的地图上的线路L2的轨道信息和不可见区域B1~B2的信息(步骤S620),并获取由独立定位运算处理部(第二定位部)23获得的铁路车辆11的行进方位(步骤S630)。
接着,独立测量切换判别部26基于铁路车辆11的行进方位以及在步骤S610中获得的铁路车辆11的位置定位,对照铁路车辆11的线路L2的轨道上的当前位置(步骤S640)。接着,独立测量切换判别部26判定铁路车辆11的当前位置是否与不可见区域B1~B2的开始点B1或B2对应(步骤S650)。例如,如果铁路车辆11为上行,则地点B1为不可见区域B1~B2的开始点,如果铁路车辆11为下行,则地点B2为不可见区域B1~B2的开始点。相反,如果铁路车辆11为上行,则地点B2为不可见区域B1~B2的结束点,如果铁路车辆11为下行,则地点B1为不可见区域B1~B2的结束点。
独立测量切换判别部26在判别为铁路车辆11进入不可见区域B1~B2的情况下(步骤S650的“是”),即使在接收强度足够强且推定位置误差少的情况下,也切换为独立测量(步骤S47),转移到独立测量处理(步骤S84)(图8)。由此,能够在电波劣化之前更准确地向独立测量处理转移。此时,行驶状态判别处理部24将处于独立测量处理状态(状态2)这一情况与时刻一起存储于存储装置27。能够将车辆位置修正部25运算出的位置坐标及独立测量运算处理部23运算出的速度优先用作铁路车辆11的位置信息。
例如在如以往那样探测电波的接收强度的降低并进行切换的情况下,也存在产生降低的位置是在进入不可见区域B1~B2内之后的情况,切换有可能延迟。与此相对,在判定铁路车辆11的当前位置是否与不可见区域B1~B2的开始点B1或B2对应的情况下,还能够使用铁路车辆11的速度信息,计算到达不可见区域B1~B2的开始点B1或B2的时刻,并按照到达开始点B1或B2的时刻向独立测量处理转移。由此,可抑制向独立测量处理的转移发生延迟。例如,在铁路车辆11以时速200公里等向上行方向高速行驶时,也能够在到达开始点B1之前开始向独立测量处理的转移,使切换点P1与开始点B1一致,即使在以往切换发生延迟的情况下,也能够更稳定地继续进行位置定位。另外,也可以与铁路车辆11的规定速度匹配地将开始点B1或B2的位置设置于不可见区域B1~B2的跟前。在该情况下,即使不使用速度信息,也能够转移到独立测量处理。
另一方面,在判别为铁路车辆11不进入不可见区域B1~B2的情况下(步骤S65的“否”),转移到分支处理C,重复从步骤S31(图4)开始的处理。在该情况下,继续主要利用定位信号运算处理部21中的使用了定位用电波信号SX1~SX4的铁路车辆11的位置定位的信息的测量。这样,在定位信号运算处理部21中的位置定位的精度高的情况下,能够主要使用定位信号运算处理部21中的位置定位的信息,在独立定位运算处理部(第二定位部)23中的位置定位的精度比定位信号运算处理部21中的位置定位的精度高的区域,能够主要使用定位信号运算处理部21中的位置定位的信息。
图8是卫星接收控制处理及独立测量切换判别处理的处理流程图(之二)。如上所述,在处于定位精度不会提高的状况下的情况下,将定位方法切换为独立测量(步骤S46),转移到独立测量处理(步骤S840)。在该情况下,在向独立测量处理转移时,虽然还并行地接收卫星等的定位信号,但认为定位精度差,一旦变为定位精度改善的从隧道中驶出之后等状况,需要切换为卫星定位。
因此,如图8所示,与独立定位并行地,使用所获取的定位信号获取定位卫星仰角及接收强度,进行推定位置误差的运算及获取(步骤S31、S32)然后,基于与所获取的定位信号对应的铁路车辆11的行进方向的方位,设定接收方位角(步骤S33)。
接着,独立测量切换判别部26使用存储于存储装置27的规定的接收强度的判定阈值db_thr,判别进行了定位的接收强度db是否低于判定阈值db_thr(步骤S810)。在db-thr<db的情况下(步骤S810的“否”),为接收强度足够强、灵敏度良好的状态,意味着定位精度较好,为了判别是否需要接收强度控制,判别进行了定位的EHPE值(ehpe)是否低于存储于存储装置27的规定的EHPE的判定阈值ehpe_thr(步骤S82)。
在ehpe<ehpe_thr的情况下(步骤S820的“是”),意味着位置精度降低率低、精度较好,独立测量切换判别部26为了结束独立测量而输出独立测量结束命令而使处理进入步骤S31(参照图4),将在独立测量处理的最后运算出的位置作为卫星定位的最初的点,开始卫星定位(步骤S830)。此时,行驶状态判别处理部24将处于独立测量处理状态(状态2)这一情况与时刻一起存储于存储装置27。由于认为处于即使实施接收强度控制及仰角控制双方,推定位置误差也不会改善的状况,因此,能够将车辆位置修正部25运算出的位置坐标及独立测量运算处理部23运算出的速度优先用作铁路车辆11的位置信息。
另一方面,在ehpe≥ehpe_thr的情况下(步骤S810的“是”),意味着位置精度降低率高、精度较差,继续独立测量处理(步骤S840),使用由独立测量处理部23运算出的速度(步骤S840)。
同样,在判别为db_thr≥db的情况下(步骤S820的“否”),也是接收强度弱、灵敏度差的状态,定位精度较差,因此,继续独立测量处理(步骤S840),使用由独立测量处理部23运算出的速度(步骤S840)。
与步骤S31~S83的处理并行地,还并行地进行步骤S610~S660的处理。即,铁路车辆11并行地进行定位信号运算处理部21中的使用了定位用电波信号SX1~SX4的铁路车辆11的位置定位和车辆位置修正部25中的基于来自三轴传感器部CSU的输出信号的铁路车辆11的位置定位(步骤S610)。在此,因为在不可见区域B1~B2内,所以主要使用基于车辆位置修正部25的位置信息。
独立测量切换判别部26逐次获取从存储装置27获取的地图上的线路L2的轨道信息和不可见区域B1~B2的信息(步骤S620),并获取由独立测量运算处理部23获得的铁路车辆11的行进方位(步骤S630)。
接着,独立测量切换判别部26基于铁路车辆11的行进方位以及在步骤S610中获得的铁路车辆11的位置定位,对照铁路车辆11的线路L2的轨道上的当前位置(步骤S640)。接着,独立测量切换判别部26判定铁路车辆11的当前位置是否与不可见区域B1~B2的结束点B1或B2对应(步骤S660)。例如,如果铁路车辆11为上行,则地点B2为不可见区域B1~B2的结束点,如果铁路车辆11为下行,则地点B1为不可见区域B1~B2的结束点。
独立测量切换判别部26在判别为铁路车辆11从不可见区域B1~B2中驶出的情况下(步骤S650的“否”),为了结束独立测量而输出独立测量结束命令,使处理转移到步骤S31(参照图4),将在独立测量处理的最后运算出的位置作为卫星定位的最初的点,开始卫星定位(步骤S830)。由此,能够按照电波紊乱消除的时机更准确地转移到卫星定位。
在评价电波紊乱而进行切换的情况下,也存在紊乱消除的位置在不可见区域B1~B2紧之后的情况,切换有可能会延迟。与此相对,在判定铁路车辆11的当前位置是否与不可见区域B1~B2的结束点B1或B2对应的情况下,能够还使用例如铁路车辆11的速度信息,计算到达不可见区域B1~B2的结束点B1或B2的时刻。由此,还能够按照到达结束点B2的时刻转移到卫星定位。这样,可抑制向卫星定位的转移发生延迟。例如,在铁路车辆11以时速200公里等高速向上行方向行驶时,还能在到达结束点B2之前开始向卫星定位的转移,使切换点P2与结束点B2一致。由此,即使在以往切换发生延迟的情况下,也能够更稳定地继续进行位置定位。另外,也可以与铁路车辆11的规定速度匹配地将结束点B1或B2的位置设置于不可见区域B1~B2的跟前。在该情况下,即使不使用速度信息,也能够转移到卫星定位处理。
另外,因为并行地进行步骤S31~S830的处理,所以在定位用电波信号SX1~SX4的状态差的情况下,维持独立测量。因此,也抑制了在定位用电波信号SX1~SX4的状态差的情况下向卫星定位处理转移。
接着,参照图9,对另一分支处理D的例子进行说明。在此,参照图9,对根据定位用电波信号SX1~SX4的信息在不可见区域B1~B2向独立测量处理切换的处理例进行说明。
图9是示意性地表示通过定位用电波信号SX1~SX4探测不可见区域B1~B2的情况下的处理环境的图。铁路车辆11在真实空间的线路L1的轨道上行驶。另外,定位信号运算处理部21使用定位用电波信号R3运算铁路车辆11的行进矢量的轨迹L3。定位用电波信号R3示意性地表示定位用电波信号SX1~SX4。
图10是另一分支处理D的流程图。在此,参照图9,对在不可见区域向独立测量处理切换的处理例进行说明。
独立测量切换判别部26运算在规定期间测量出定位用电波信号R3的时间序列值的平均值db1和离散值dv1(步骤S910)。如上所述,平均值db1在不可见区域B1~B2减少,在包含不可见区域B1~B2的前后的区域内,离散值dv1增加。
铁路车辆11并行地进行定位信号运算处理部21中的使用了定位用电波信号SX1~SX4的铁路车辆11的位置定位和车辆位置修正部25中的基于来自三轴传感器部CSU的输出信号的铁路车辆11的位置定位(步骤S920)。接着,在定位信号运算处理部21,基于定位用电波信号SX1~SX4将铁路车辆11的行进方向作为行进矢量L3进行运算(步骤S930)。
接着,定位信号运算处理部21运算行进矢量L3的每单位时间的变化量r1(步骤S940)。
例如,在r1>r1_thr的情况下,独立测量切换判别部26判别为是不可见区域B1~B2的开始点B1(步骤S950)。行进矢量L3对于定位用电波信号SX1~SX4的强度的紊乱的灵敏度高,在不可见区域B1~B2的开始点B1附近,变化量r1更大幅度地变动。由此,能够判别接近了开始点B1的情况。在该情况下,也可以还使用定位用电波信号R3的离散值dv1及平均值db1判定铁路车辆11的当前位置是否与不可见区域B1~B2的开始点B1或B2对应。即,也可以在判定条件中添加db1≤db1_thr且dv1>dv1_thr。由此,在定位用电波信号SX1~SX4的强度的紊乱少的情况下,能够进一步抑制不可见区域B1~B2的开始点B1的错误判定。这样,即使不使用线路L1的轨道信息,也能够判定不可见区域B1~B2的开始点B1。即使在没有地图数据的情况、或者存在在地图信息上没有的建筑物等的情况下,也能够进行不可见区域B1~B2的判定。
独立测量切换判别部26在判别为铁路车辆11进入不可见区域B1~B2的情况下(步骤S950的“是”),切换为独立测量(步骤S47),转移到独立测量处理(步骤S84)(图11)。
另一方面,在判别为铁路车辆11不进入不可见区域B1~B2的情况下(步骤S950的“否”),转移到分支处理C,重复从步骤S31(图4)开始的处理。在该情况下,主要利用定位信号运算处理部21中的使用了定位用电波信号SX1~SX4的铁路车辆11的位置定位的信息继续测量。这样,在定位信号运算处理部21中的位置定位的精度高的情况下,能够主要使用定位信号运算处理部21中的位置定位的信息,在车辆位置修正部25中的位置定位的精度比定位信号运算处理部21中的位置定位的精度高的区域,能够主要使用车辆位置修正部25中的位置定位的信息。
图11是使用图10所示的处理的情况下的流程图。与图8相比,在不可见区域的判定方法中使用在图10中说明的方法这一点上不同。以下,对与图8的不同点进行说明。
例如,在r1<r1_thr的情况下,独立测量切换判别部26判别为是不可见区域B1~B2的结束点B2(步骤S960)。行进矢量L3对于定位用电波信号SX1~SX4的强度的紊乱的灵敏度高,在不可见区域B1~B2的结束点B2附近,强度的紊乱减少,因此,变化量r1减小。由此,能够判别接近了结束点B2的情况。在该情况下,也可以还使用定位用电波信号R3的离散值dv1及平均值db1判定铁路车辆11的当前位置是否与不可见区域B1~B2的开始点B1或B2对应。即,也可以在判定条件中添加db1≥db1_thr且dv1<dv1_thr。由此,在定位用电波信号SX1~SX4的强度的紊乱大的情况下,能够进一步抑制不可见区域B1~B2的结束点B2的错误判定。如上所述,在处于定位精度不会提高的状况下的情况下,将定位方法切换为独立测量(步骤S46),转移到独立测量处理(步骤S840)。在该情况下,在向独立测量处理转移时,还并行地接收卫星等定位信号,但认为定位精度差,一旦变为定位精度改善的从隧道中驶出之后等状况,需要切换为卫星定位。
接着,参照图12,对根据地图数据及定位用电波信号SX1~SX4的信息向独立测量处理切换的处理例进行说明。
图12是示意性地表示根据地图数据及定位用电波信号SX1~SX4的信息切换为不可见区域B1~B的情况下的处理环境的图。铁路车辆11在真实空间的线路L1的轨道上行驶。另外,定位信号运算处理部21使用定位用电波信号R3运算铁路车辆11的行进矢量的轨迹L3。定位用电波信号R3示意性地表示定位用电波信号SX1~SX4。
图13是又一分支处理D的流程图。在此,参照图12,对在不可见区域向独立测量处理切换的处理例进行说明。图13是与图8对应的流程图。以下对与图8的处理的不同点进行说明。
独立测量切换判别部26还使用定位用电波信号R3的离散值dv1及平均值db1判定铁路车辆11的当前位置是否与不可见区域B1~B2的开始点B1或B2对应(步骤S1300)。例如,独立测量切换判别部26还使用定位用电波信号R3的离散值dv1及平均值db1判定铁路车辆11的当前位置是否与不可见区域B1~B2的开始点B1或B2对应。例如,在判定条件中db1≥db1_thr且dv1<dv1_thr、或者铁路车辆11到达了规定的位置的情况下,判定为是不可见区域B1~B2。
由此,即使例如在由于移动物、施工中的建筑物等而产生了例如未存储于存储装置27的预想以外的不可见区域的情况下,也能够判定铁路车辆11处于不可见区域内。
图14是使用图13所示的处理的情况下的流程图。与图8相比,在不可见区域的判定方法中使用在图13中说明的方法这一点上不同。以下,对与图8的不同点进行说明。
独立测量切换判别部26还使用定位用电波信号R3的离散值dv1及平均值db1判定铁路车辆11的当前位置是否与不可见区域B1~B2的结束点B1或B2对应(步骤S1400)。例如,在判定条件中db1≥db1_thr且dv1<dv1_thr、或者铁路车辆11到达了规定的位置的情况下,独立测量切换判别部26判定为不可见区域B1~B2的结束点B1或B2。由此,即使在由于未存储于存储装置27的建筑物、施工中的建筑物等而产生了例如另外的不可见区域的情况下,也能够判定铁路车辆11驶出到了不可见区域外。
接着,对卫星接收控制的具体情况进行说明。
图15是卫星接收控制部22的接收卫星控制处理的处理流程图。卫星接收控制部22根据定位环境执行选择用于位置探测的人造卫星的功能。
在接收定位信号的天线13(以下有时简单地记为天线13)处于铁路车辆11的内部的情况下,特别是相对于行进方向,来自相反方向的卫星或存在于测面方向的卫星等的定位信号发生反射或衍射而被接收到的可能性高,因此,会立即对测定精度产生影响。因此,卫星接收控制部22为了维持测定精度,进行接收卫星控制处理。
如图15所示,首先,卫星接收控制部22使用获所取的定位信号,获取定位卫星仰角及接收强度(步骤S61)。
接着,卫星接收控制部22从可接收卫星历书信息及卫星星历信息的人造卫星进行获取,获取人造卫星12-1~12-4的轨道信息(步骤S62)。
图16是定位用信息的接收状态的说明图。图16的(a)是卫星轨道信息的示意图。在图16的(a)中,在圆的中心配置有铁路车辆11的天线13。图16的(a)中,○记号表示人造卫星的当前位置,穿过人造卫星的当前位置的曲线表示各人造卫星的卫星轨道信息。
在如图16的(a)这样的状况下,铁路车辆11的天线13实际可接收的范围根据天线13的配置位置及铁路车辆11的行驶位置而不同,例如,如图16的(b)所示,卫星接收控制部22设定接收有效区AE及接收无效区AN,基于铁路车辆11的行进方向DR,相对于行进方向DR向顺时针方向及逆时针方向分别以例如成135度的方式设定接收方位角。
图17是表示定位信号速度运算部(第二测量部)29的速度测量的情况下的接收有效区AE及接收无效区AN的设定例的图。在定位信号速度运算部(第二测量部)29的速度测量的情况下,因为通过多普勒进行速度测定,所以接收有效区AE被进一步向行进方向DR方向限制。在该情况下,向顺时针方向及逆时针方向分别以例如成45度的方式设定接收方位角(步骤S63)。
而且,卫星接收控制部22对于与所设定的接收方位角对应的接收有效区AE,如图16的(c)所示,设定卫星配置判定区AD,继续进行确定下次应选择的人造卫星的处理,该卫星配置判定区AD用于在相对于铁路车辆11的行进方向DR向顺时针方向及逆时针方向分别行进90度后判定用于选择人造卫星的人造卫星配置位置(步骤S64)。
在此,对卫星接收控制部22的人造卫星的选择处理进行详细说明。
图18是人造卫星的选择处理的说明图。如图18所示,铁路车辆11的行进方向是纸面垂直方向前方。而且,卫星接收控制部22从位于接收有效区AE的人造卫星选择属于所设定的接收强度(由接收强度上限值及接收强度下限值确定的范围)的人造卫星作为有效的人造卫星12E。
相反,将不属于所设定的接收强度范围的人造卫星12N1、12N21、12N2判断为无效,并将其从选择中排除。更详细而言,可作为有效的人造卫星12E而选择的人造卫星是位于接收有效区AE的人造卫星中的能够经由天线13直接接收定位用信号的卫星。
另一方面,无效的人造卫星12N1是由于高楼或山等障碍物BR而定位用信号无法到达、不能接收定位用信号的人造卫星。
另外,无效的人造卫星12N21是如下人造卫星:由于高楼或山等障碍物BR,定位用信号被反射而到达天线13,因此,产生时间延迟,并且接收强度降低,定位精度降低。
另外,无效的人造卫星12N22是如下人造卫星:由于高楼或山等障碍物BR,定位用信号发生衍射而到达天线13,因此,产生时间延迟,并且接收强度降低,定位精度降低。
图19是卫星接收控制部22的仰角控制的说明图。
如图19的(a)所示,卫星接收控制部22以包含通过上述的人造卫星选择处理选择的所有有效的人造卫星12E并且不含无效的人造卫星12N(=人造卫星12N21及人造卫星12N22)的方式控制仰角EL。
其结果,有效的仰角范围AEL变为如图19的(b)所示那样,所以进一步确定图16所示的位于接收有效区AE的人造卫星,进行对应的定位用信号的处理。其结果,能够将定位精度维持在所期望的值以上。
在该情况下,卫星接收控制部22以一定时间(例如1秒钟)从接收方位角定期地获取铁路车辆11的行进方向,获取平均化的方位角作为行进方向角。也可以根据卫星轨道信息选定存在于该行进方向角的卫星。
而且,在行进方向的方位角由于转弯或路径变更等而大幅度变化的情况下(例如,10°),也可以随时获取行进方向角,根据卫星轨道信息选定人造卫星。
由此,能够仅选定能够进一步提高位置探测精度的定位信号。
接着,对独立测量运算处理部23及行驶状态判别处理部24的功能进行详细说明。
独立测量运算处理部23具有基于三轴传感器部CSU所输出的加速度信息、陀螺仪信息及地磁信息对成为校准的初始值进行运算处理的功能、对三轴传感器值的累计误差进行修正运算处理的功能、以及基于修正运算处理后的值和三轴传感器值对铁路车辆11的速度信息进行运算处理的功能。行驶状态判别处理部24具备基于从卫星接收信息获得的铁路车辆11的速度信息和独立测量运算处理部23运算处理出的速度信息对被推定为误差容许范围内的铁路车辆11的行驶信息进行分选处理的功能、以及基于铁路车辆11的速度信息判别停止和行驶的功能。
图20是独立测量运算处理部23及行驶状态判别处理部24的处理流程图。
首先,独立测量运算处理部23获取三轴传感器部CSU所输出的加速度信息、陀螺仪信息及地磁信息(步骤S71)。
接着,独立测量运算处理部23基于所获取的加速度信息、陀螺仪信息及地磁信息,进行初始值运算处理(步骤S72)。优选的是,该初始值运算处理基本上在铁路车辆11停止时实施。在此,在铁路车辆11停止时实施的理由不仅在于在移动时实施初始值运算处理会影响测定值,而且还在于累积误差的初始化较为困难。
在以下的说明中,说明为了能够获得更准确的测定值并且为了进行累积误差的初始化而在停止时实施初始值运算处理。将在铁路车辆11停止时三轴传感器部CSU所输出的加速度信息、陀螺仪信息及地磁信息各自的值累计、平均化,获取所获得的累计平均化值作为各个三轴传感器的偏移值,将此作为初始值运算处理。
而且,对于三轴传感器部CSU所输出的加速度信息、陀螺仪信息及地磁信息各自的值对累计误差进行修正运算处理这一功能能够通过对获取了该偏移值的三轴传感器的各值进行应用而使累积的误差偏移。
另外,初始值运算处理不仅在铁路车辆11的行驶开始前,而且即使在铁路车辆11在车站等停止的情况下,在经过了规定的设定时间而停止状态仍继续时,通过实施同样的初始值运算处理而再次获取偏移量,且能够通过随时使累积误差偏移而减少累积误差。
监视三轴传感器部CSU所输出的三轴传感器值的累计误差esn(步骤S73),修正三轴传感器值的输出值而运算修正三轴传感器值(步骤S74)。
接着,独立测量运算处理部23根据所获得的修正三轴传感器值运算铁路车辆11的速度(步骤S75)。在此,铁路车辆11的速度运算通过在获取到三轴传感器部CSU所输出的三轴加速度传感器的输出即加速度的值的时刻间隔进行积分处理而作为铁路车辆11的速度信息进行运算,将各信息作为独立定位数据DS以时间序列输出。
另一方面,行驶状态判别处理部24获取从卫星接收信息获得的铁路车辆11的速度信息(步骤S76)。
接着,行驶状态判别处理部24将三轴传感器的累积误差容许值esn_thr和监视获得的累积误差esn进行比较,判别累积误差esn是否小于累积误差容许值esn_thr(步骤S77)。
更详细而言,判别是否是从上次铁路车辆11的停止没有连续行驶规定时间以上、三轴传感器的累积误差被认为仍在容许范围内的状况。
就行驶状态判别处理部24而言,在步骤S77的判别中,在累积误差esn小于累积误差容许值esn_thr的情况下,即,在esn<esn_thr的情况下(步骤S77:是),因为是与三轴传感器部CSU所输出的三轴加速度传感器的输出对应的铁路车辆11的速度信息的可靠性被认为较高的状况,所以选择与三轴加速度传感器的输出对应的铁路车辆11的速度信息spd(步骤S78),基于与该三轴加速度传感器的输出对应的铁路车辆11的速度信息spd以及存储于存储装置27的规定的铁路车辆11的速度判定值spd_thr,判别是否是铁路车辆11的速度信息spd<铁路车辆11速度判定值spd_th(步骤S80)。在此,如果为spd<spd_thr,则铁路车辆11为停止状态,如果为spd≥spd_thr,则铁路车辆11为行驶状态。
在步骤S80的判别中,在判别为spd<spd_thr的情况下(步骤S80:是),因为铁路车辆11为停止状态,所以行驶状态判别处理部24输出铁路车辆11停止的意思以及与三轴传感器部CSU所输出的三轴加速度传感器的输出对应的铁路车辆11的速度信息,结束处理(步骤S81)。
在步骤S80的判别中,在判别为spd≥spd_thr的情况下(步骤S80:否),就行驶状态判别处理部24而言,因为铁路车辆11为行驶状态,所以输出铁路车辆11行驶的意思以及与三轴传感器部CSU所输出的三轴加速度传感器的输出对应的铁路车辆11的速度信息,结束处理(步骤S82)。
另一方面,在步骤S77的判别中,在累积误差esn为累积误差容许值esn_thr以上的情况下,即,在esn≥esn_thr的情况下(步骤S77:否),为如下状况:处于铁路车辆11的连续行驶状态,与三轴传感器部CSU所输出的三轴加速度传感器的输出对应的铁路车辆11的速度信息的可靠性较低,如果存储于存储装置27的状态为Stat1,则与卫星信息对应的铁路车辆11的速度信息的可靠性被认为较高。因此,选择与卫星信息对应的铁路车辆11的速度信息spd(步骤S79),此外,如果状态为Stat2,则使处理待机,直至状态变为Stat1。另外,如果存储于存储装置27的状态为Stat1,则行驶状态判别处理部24能够优先使用定位信号速度运算部29运算出的速度。
基于与来自人造卫星的接收数据对应的铁路车辆11的速度信息spd以及存储于存储装置27的规定的铁路车辆11的速度判定值spd-thr,判别是否是铁路车辆11的速度信息spd<铁路车辆11速度判定值spd_th(步骤S80)。在此,如果spd<spd_thr,则判别为铁路车辆11是停止状态,如果spd≥spd_thr,则判别为铁路车辆11是行驶状态。
在步骤S80的判别中,在判别为spd<spd_thr的情况下(步骤S80:是),因为铁路车辆11为停止状态,所以输出铁路车辆11停止的意思以及与来自三个人造卫星的接收数据对应的铁路车辆11的速度信息,结束处理(步骤S81)。
在步骤S80的判别中,在判别为spd≥spd-thr的情况下(步骤S40:否),因为铁路车辆11为行驶状态,所以输出铁路车辆11行驶的意思以及与来自人造卫星的接收数据对应的铁路车辆11的速度信息,结束处理(步骤S82)。
图21是车辆位置修正部25的处理流程图。
车辆位置修正部25获取在卫星接收控制部22运算出的推定位置误差(EHPE及PDOP)pos(步骤S91)。
接着,车辆位置修正部25获取存储于存储装置27的规定的位置误差容许值pos-thr,将所获取的推定位置误差pos和位置误差容许值pos_thr进行比较,判别是否是推定位置误差pos<位置误差容许值pos_thr,即位置探测精度是否较好(步骤S92)。
在步骤S92的判别中,在推定位置误差pos<位置误差容许值pos_thr的情况下(步骤S92:是),因为位置探测精度较好,所以从行驶状态判别处理部24获取铁路车辆11的停止信息或者行驶信息(步骤S93)。
接着,车辆位置修正部25判别铁路车辆11处于停止状态或者行驶状态中的哪种状态(步骤S94)。
在步骤S94的判别中,在推定位置误差pos<位置误差容许值pos_thr,铁路车辆11处于停止状态的情况下(步骤S94:是),在三轴传感器部CSU进行三轴传感器值的初始化(步骤S95),车辆位置修正部25使处理再次转移到步骤S91。
另一方面,在步骤S94的判别中,在推定位置误差pos≥位置误差容许值pos_thr的情况下(步骤S94:否),因为位置探测精度较差,所以获取行驶状态判别处理部24所输出的速度信息(步骤S96)。
独立测量运算处理部23根据所获得的修正三轴传感器值运算铁路车辆11的速度(步骤S75)。在此,铁路车辆11的速度运算通过在获取到三轴传感器部CSU所输出的三轴加速度传感器的输出即加速度的值的时刻间隔进行积分处理而作为铁路车辆11的速度信息进行运算,将各信息作为独立定位数据DS以时间序列输出。
接着,就车辆位置修正部25而言,独立测量运算处理部23进行方位角运算(步骤S97),车辆位置修正部25获取其值。接着,独立测量运算处理部23进行三轴方向的行驶矢量的运算(步骤S98),车辆位置修正部25获取其值。
接着,车辆位置修正部25从定位信号运算处理部21获取包含状态为Stat1的情况下的纬度信息及经度信息的位置信息(位置坐标),确定铁路车辆11的当前位置(步骤S99)。此外,如果状态为Stat2,则车辆位置修正部25使确定当前位置的处理待机,直至状态变为Stat1。
而且,车辆位置修正部25根据来自人造卫星的接收电波的定位时刻间隔,沿方位角方向根据速度信息求出行驶矢量的大小,并进行累积运算,由此,进行铁路车辆11的当前位置的修正运算(步骤S100)。
如上所说明,根据本第一实施方式,能够可靠地获取铁路车辆11的行驶位置,即使在不能获得隧道等的卫星信息的状况下,也能够向延迟较少的独立定位进行切换,提供更准确的行驶位置数据。另外,能够可靠地获取铁路车辆11的行驶位置,即使在不能获得隧道等的卫星信息的状况下的铁路车辆11的速度测量中,也能够向延迟较少的独立定位中的速度测量进行切换,提供更准确的速度数据。
<第二实施方式>
第二实施方式在如下方面与第一实施方式不同:进行铁路车辆11的路径预测,判别铁路车辆11在直线区间或者曲线区间中的哪个区间行驶,而且与预先存储的铁路车辆11的行驶区间信息对比,由此,基于铁路车辆11的实际的行驶状态是否与实际的行驶区间相适来提供用于进行适当的行驶的信息。以下,对与第一实施方式的不同点进行说明。
图22是第二实施方式的接收运算处理装置的功能结构框图。如图22所示,除了图2所示的第一实施方式的结构之外,还具备预测铁路车辆11的实际的路径(规定的行驶区间中的行驶位置)的车辆路径预测运算部30,这一点与第一实施方式不同。
在此,对车辆路径预测运算部30的动作进行说明。
图23是车辆路径预测运算部的处理流程图(之一)。
车辆路径预测运算部30获取并存储包含定位信号运算处理部21所输出的纬度信息及经度信息的位置信息(位置坐标)(步骤S101)。
接着,车辆路径预测运算部30基于预先存储于存储装置27的平均化对象时间,进行位置信息的平均化运算,运算每平均化对象时间内的铁路车辆11的平均的位置(步骤S102)。然后,车辆路径预测运算部30基于所获得的平均化的位置信息,获取铁路车辆11的行进方向角(铁路车辆11的行进方向的方位)(步骤S103)。而且,车辆路径预测运算部30基于三轴传感器部CSU所输出的加速度信息、陀螺仪信息及地磁信息运算铁路车辆11的姿态角(例如,倾斜)(步骤S104)。
接着,车辆路径预测运算部30获取行驶状态判别处理部24所输出的铁路车辆11的停止/行驶状态及速度信息(步骤S105)。接着,车辆路径预测运算部30运算并存储铁路车辆11的行进方向矢量(步骤S106)。
而且,车辆路径预测运算部30进行行进方向矢量平均化运算,即:按照预先存储于存储装置27的规定的矢量运算对象时间对所存储的铁路车辆11的行进方向矢量求出行进方向矢量的平均值即矢量方位角shp(步骤S107)。
图24是车辆路径预测运算部的处理流程图(之二)。
接着,车辆路径预测运算部30运算矢量方位角shp(步骤S111)。
接着,车辆路径预测运算部30基于铁路车辆11的速度信息以及预先存储于存储装置27的用于判别直线区间或者曲线区间的线性判定值shp_thr,判别铁路车辆11的当前的行驶区间是直线区间或者曲线区间中的哪一个(步骤S112)。
即,判别矢量方位角shp是否小于线性判定值shp_thr。在步骤S112的判别中,在shp<shp_thr的情况下(步骤S112:是),因为当前的列车行驶区间是直线区间,所以车辆路径预测运算部30进行直线区间判定输出(步骤S113)。
接着,车辆路径预测运算部30获取行驶状态判别处理部24所输出的当前的铁路车辆11的停止/行驶状态及速度信息(步骤S114)。
而且,车辆路径预测运算部30基于行驶区间数据库,确定并获取当前的铁路车辆11的行驶位置及行驶区间,该行驶区间数据库存储有直至该时刻为止的行驶历史以及预先存储于存储装置27的用于确定行驶区间的行驶路径形状及距离信息(步骤S115)。
接着,从存储装置27读出所确定的铁路车辆11的行驶位置及行驶区间中的限速数据xspd_thr1,将其与该铁路车辆11的速度spd比较,判别铁路车辆11是否超速(步骤S116)。
在步骤S116的判别中,在pd<xspd_thr1的情况下(步骤S116:否),因为判别为铁路车辆11在限速范围内行驶,所以进行限制速度以内的判定输出,结束处理(步骤S117)。
在步骤S116的判别中,在spd≥xspd_thr1的情况下(步骤S116:是),因为判别为铁路车辆11超速行驶,所以输出超速的判定输出及当前速度,结束处理(步骤S118)。
图25是车辆路径预测运算部的处理流程图(之三)。
在步骤S112的判别中,在shp≥shp-thr的情况下(步骤S112:否),因为当前的列车行驶区间是曲线区间,所以如图25所示,车辆路径预测运算部30进行曲线区间判定输出(步骤S121)。
接着,车辆路径预测运算部30运算曲线半径(曲率半径)(步骤S122),从表示预先存储于存储装置27的符合设计基准的曲率半径和倾斜量的对应关系的数据库中获取与运算出的曲线半径对应的倾斜量(步骤S123)。
而且,车辆路径预测运算部30基于行驶区间数据库,确定并获取当前的铁路车辆11的行驶位置及行驶区间,该行驶区间数据库存储有直至该时刻为止的行驶历史以及预先存储于存储装置27的用于确定行驶区间的行驶路径的形状及距离信息(步骤S124)。
接着,车辆路径预测运算部30获取行驶状态判别处理部24所输出的当前的铁路车辆11的停止/行驶状态及速度信息(步骤S125)。
接着,从存储装置27读出所确定的铁路车辆11的行驶位置以及曲线区间即行驶区间中的符合设计基准的曲率半径和倾斜量下的限速数据xspd-thr2,将其与该铁路车辆11的速度spd比较,判别铁路车辆11是否超速(步骤S126)。
在步骤S126的判别中,在pd<xspd_thr2的情况下(步骤S126:否),因为判别为铁路车辆11在限速范围内行驶,所以进行限制速度以内的判定输出,结束处理(步骤S127)。
在步骤S126的判别中,在pd≥xspd-thr2的情况下(步骤S126:是),因为判别为铁路车辆11超速行驶,所以输出超速的判定输出及当前速度,结束处理(步骤S128)。
如上所说明,根据本第二实施方式,能够通过获取铁路车辆11的行驶位置并根据所获取的数据进行铁路车辆11的路径预测,提供可用于前方探测范围的设定、路径预测、行驶位置的探测、超速探测等的数据。另外,能够制作行驶路线地图,能够在行驶辅助或铁路设备信息制作辅助中展开。
<第二实施方式的变形例>
在第二实施方式中,是输出超速信息的情况,但也能够用于通过摄像机等探测前方的障碍物的情况下的探测区的范围设定。
即,摄像机等的探测区通常在铁路的情况下是线路上的建筑界限、铁路车辆11界限的区,但在想要通过改建或临时施工等而恒久或者临时扩展车站、平交道等探测区的情况等下,由于能够对铁路车辆11当前行驶的路段的位置进行定位,因此只要在行驶区间的数据库中记录车站、平交道等探测对象位置,就能够从跟前的一定距离扩展探测区。
在以上的说明中,在三轴传感器部CSU中,对具备三轴加速度传感器、三轴陀螺仪传感器及三轴地磁传感器的结构进行了说明,但三轴地磁传感器不是必须的结构,所以也可以构成为至少具备三轴加速度传感器或者三轴陀螺仪传感器中的至少一方。
如上所说明,根据各实施方式的装置及方法,根据来自人造卫星等的定位信号的状况来控制接收仰角和接收强度、卫星选择,另外,进行独立测量处理的切换判别,由此,即使在接收环境差的状况下也能够进行铁路车辆11的位置探测。
其结果,能够使在以往的铁路沿线环境中由于多路径等问题而测量精度最大成为±10m的情况为更高精度(例如,±1m),实现所需的精度。
另外,即使在隧道、桥上车站站房等高架下或地下区间等卫星不可接收区域也能够容易地掌握行驶位置。
而且,通过获取铁路车辆11的行驶位置,并根据所获取的数据进行铁路车辆11路径预测,能够用于前方探测范围的设定、路径预测、行驶位置的探测、超速探测等。
而且,能够制作行驶路线地图,能够在行驶辅助或铁路设备信息制作辅助中展开。
本实施方式的铁路用行驶位置探测装置为利用具备MPU等控制装置、ROM或RAM等存储装置、HDD、CD驱动装置等外部存储装置、显示各种信息的显示装置和用于输入各种信息的输入装置的通常计算机的硬件结构。
由本实施方式的铁路用行驶位置探测装置执行的程序以可安装的形式或可执行的形式的文件记录于CD-ROM、USB存储装置等半导体存储装置、DVD(Digital VersatileDisk:数字通用光盘)等计算机可读取的记录介质而提供。
另外,也可以构成为:将由本实施方式的铁路用行驶位置探测装置执行的程序存储在与因特网等网络连接的计算机上,通过经由网络进行下载来提供。另外,也可以构成为:将由本实施方式的铁路用行驶位置探测装置执行的程序经由因特网等网络来提供或分发。
另外,也可以构成为:将本实施方式的铁路用行驶位置探测装置的程序预先装入到ROM等中而提供。
对本发明的一些实施方式进行了说明,但这些实施方式是作为例子而提示出,并不意图限定发明的范围。这些新的实施方式能够以其它各种方式实施,能够在不脱离发明的主旨的范围内进行各种省略、替换、变更。这些实施方式及其变形包含在发明的范围及主旨中,并且包含在权利要求书所记载的发明及其等同的范围内。
- 位置定位方法、装置、设备和计算机可读存储介质
- 用于确定空中装置的操作位置的定位系统和方法
- 使用定位标记的位置误差测量方法和装置及根据使用定位标记的位置误差测量结果进行位置修正的加工装置
- 使用定位标记的位置误差测量方法和装置及根据使用定位标记的位置误差测量结果进行位置修正的加工装置