定位装置以及可组网式定位系统
文献发布时间:2023-06-19 18:30:43
技术领域
本申请涉及移动机器人定位的技术领域,尤其涉及定位装置以及可组网式定位系统。
背景技术
目前,在移动机器人领域,用于全局精确定位的主流硬件有激光雷达、全站仪、深度相机、UWB、陀螺仪以及里程计等。其中,基于激光雷达的定位技术主要有激光SLAM定位和配合反光板的三边定位,其定位精度可以达到±15mm,但激光雷达容易受到外界环境的干扰,当障碍物为玻璃或者反光板上有污染物时,激光雷达的定位精度将大打折扣;全站仪定位能够提供精确的距离信息,其精度可以达到±2mm,但不能提供被测物体的航向角信息,并且全站仪的成本较高;视觉相机能探测到目标与相机之间的距离信息,并且主要利用视觉SLAM算法进行定位,其定位在±20mm;UWB定位技术是通过无线电在多个基站中相互通讯并测得相互之间的距离,其定位精度在±50mm,基于无线电的特性,该技术能够在地下或者复杂的室内环境中稳定运行,抗干扰能力强,不会受到外界障碍物、恶劣天气等因素的影响;陀螺仪和里程计的定位方法是通过数学积分完成的,容易存在累计误差,在小范围内定位精度是可以保证的,该方法通常与其他传感器进行融合使用。
综上所述,全站仪的定位精度最高,但其价格高昂;UWB的抗干扰能力最强,但其定位精度不能达到毫米级。分析可知,运用激光进行定位可以获得较高的定位精度,运用无线电定位能过获得较好的抗干扰能力。
申请号CN201910648140.2公开了一种基于视觉与IMU或里程计的AGV组合导航定位方法,该方法能够在复杂的环境中提供准确的定位信息,但该方法主要依赖地面作为参考物,当地面平整光滑、颜色一致的时候,该方法会存在较大的定位误差,并且IMU和里程计存在累计定位误差的问题。
发明内容
有鉴于此,本申请提供定位装置以及可组网式定位系统,定位精度高。
第一方面,本申请提供一种定位装置,所述定位装置安装于移动机器人上,所述定位装包括:
UWB模块,固定安装在中心支撑圆柱上;
特征圆球,固定安装在UWB模块上;
第一电机驱动旋转云台,固定安装在所述特征圆球上;
视觉相机支撑架,固定安装在所述第一电机驱动旋转云台上;
视觉相机,可俯仰转动地安装在所述视觉相机支撑架上;
第二电机驱动旋转云台,固定安装在所述视觉相机支撑架上;
激光测距仪支撑架,固定安装在所述第二电机驱动旋转云台上;
激光测距仪,可俯仰转动地安装在所述激光测距仪支撑架上。
可选地,所述第一电机驱动旋转云台、第二电机驱动旋转云台、用以驱动激光测距仪俯仰转动的激光测距仪仰角调节电机,和用以驱动视觉相机俯仰转动的视觉相机仰角调节电机均配备有霍尔编码器。
可选地,所述中心支撑圆柱上固定安装有第一八边形支撑板和第二八边形支撑板,所述第一八边形支撑板上可转动地安装有用以接受外界旋转动力输入的驱动板,所述第二八边形支撑板可转动地安装有从动板,所述驱动板、所述从动板用以可转动地安装在外侧支撑板上。
可选地,用以向所述驱动板提供外界旋转动力输入的驱动板云台电机配备有霍尔编码器。
可选地,所述外侧支撑板上安装有太阳能充电板。
可选地,所述中心支撑圆柱上安装有用以容纳电池的电池盒外壳。
可选地,所述驱动板、从动板呈平行地安装。
第二方面,本申请提供一种可组网式定位系统,包括移动机器人、用以承载移动机器人行走的环境地图,和如权利要求1所述的定位装置,所述定位装置固定安装在所述移动机器人上并用以定位该移动机器人的位置。
可选地,还包括外侧支撑板上,所述外侧支撑板用以固定安装在所述环境地图或移动机器人。
以上提供的定位装置以及可组网式定位系统,结合激光测距仪、视觉相机以及UWB的接力定位策略,弥补了UWB和视觉相机定位精度不高,以及激光测距仪不能实现对某一物体持续追踪的缺陷。而且,本申请主要通过激光测距仪获得高精度定位信息,同时UWB和视觉相机进行辅助追踪,从而实现激光测距仪能稳定跟踪于某一物体。除此,本申请定位装置成本极低,可以使用多个高精度定位装置布局在室内环境中进行组网。
附图说明
下面结合附图,通过对本申请的具体实施方式详细描述,将使本申请的技术方案及其它有益效果显而易见。
图1为本申请实施例提供的可组网式高精度定位系统的结构图;
图2为本申请实施例提供的移动机器人搭载定位装置的结构图;
图3为本申请实施例提供的定位装置的顶侧示意图;
图4为图3中A处的局部放大图;
图5为图3中B处的局部放大图;
图6为本申请实施例提供的定位装置的底侧示意图;
图7为图6中C处的局部放大图;
图8为本申请实施例提供的定位装置闭合过程中示意图;
图9为本申请实施例提供的定位装置完全闭合示意图。
其中,图中元件标识如下:
1-环境地图;2-移动机器人;3-高精度定位装置;301-外侧支撑板;302-太阳能充电板;303-UWB模块;304-中心支撑圆柱;305-第一八边形支撑板;306-驱动板;307-驱动板云台电机;308-特征圆球;309-第一电机驱动旋转云台;310-视觉相机支撑架;311-第二电机驱动旋转云台;312-激光测距仪支撑架;313-激光测距仪仰角调节电机;314-激光测距仪;315-视觉相机仰角调节电机;316-视觉相机;317-第二八边形支撑板;318-从动板;319-锂电池;320-电池盒外壳;321-电池盒底盖。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
在本申请的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个所述特征。在本申请的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本申请中的具体含义。
下文的公开提供了许多不同的实施方式或例子用来实现本申请的不同结构。为了简化本申请的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本申请。此外,本申请可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/或设置之间的关系。此外,本申请提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。
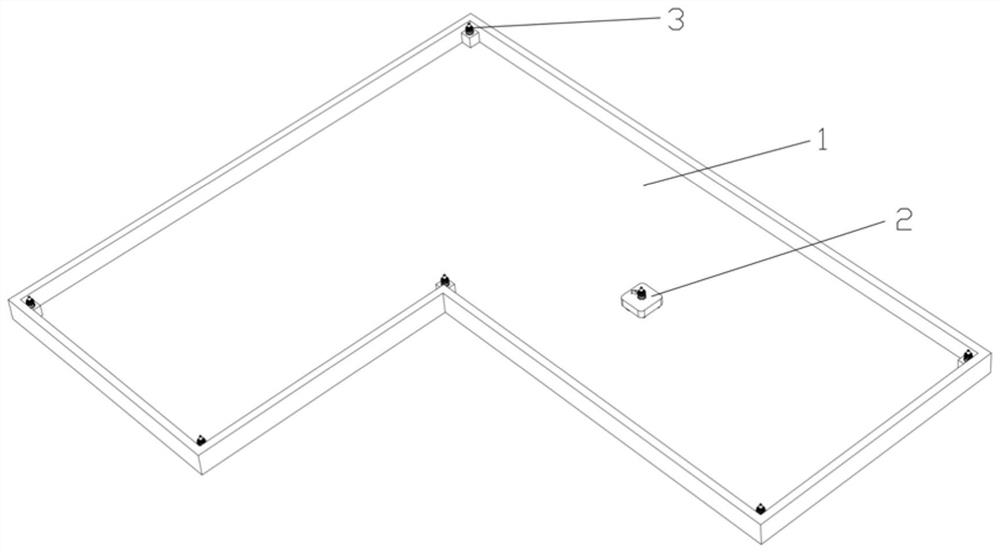
参考图2,本申请提供的可组网式定位系统,主要包括若干个定位装置3、移动机器人2和环境地图1。
其中外侧支撑板301固定安装在环境地图1或者移动机器人2上,太阳能充电板302固定安装在外侧支撑板301上,UWB模块303固定安装在中心支撑圆柱304上,第一八边形支撑板305固定安装在中心支撑圆柱304上,驱动板306转动安装在第一八边形支撑板305上,驱动板云台电机307的底座固定安装在第一八边形支撑板305上,驱动板云台电机307的上盖固定安装在驱动板306上,特征圆球308固定安装在UWB模块303上,第一电机驱动旋转云台309的底座固定安装在特征圆球308上,视觉相机支撑架310固定安装在第一电机驱动旋转云台309的上盖上,视觉相机仰角调节电机315固定安装在视觉相机支撑架310上,视觉相机316固定安装在视觉相机仰角调节电机315的主轴上,第二电机驱动旋转云台311的底座固定安装在视觉相机支撑架310上,激光测距仪支撑架312固定安装在第二电机驱动旋转云台311的上盖上,激光测距仪仰角调节电机313固定安装在激光测距仪支撑架312上,激光测距仪314固定安装在激光测距仪仰角调节电机313的主轴上,第二八边形支撑板317固定安装在中心支撑圆柱304上,从动板318转动安装在第二八边形支撑板317上,电池盒外壳320固定安装在中心支撑圆柱304上,电池盒底盖321固定安装在电池盒外壳320上,锂电池319固定安装在电池盒底盖321上,驱动板306的末端转动安装在外侧支撑板301上,从动板318的末端转动安装在-外侧支撑板301上。
在一个典型的实施方案中,驱动板306与-从动板318呈平行安装。
驱动板云台电机307、第一电机驱动旋转云台309、第二电机驱动旋转云台311、激光测距仪仰角调节电机313和视觉相机仰角调节电机315均配备有霍尔编码器,能实时反馈旋转角度。
现在针对一个常见的应用场景中,来阐述本申请定位的操作过程。应当注意的是,此常见的实施方案不可作为理解本申请所声称所要解决技术问题的必要性特征认定的依据,其仅仅是示范而已。
再次参考图1,具体步骤如下:
S1:将3个或者3个以上的定位装置3摆放在环境地图1的角落,摆放的过程中尽量确保没有死角限制,使得相邻的定位装置3之间能够透视;
S2:在移动机器人2的机械中心安装定位装置3,为了保证较好的定位精度,尽量保证各个定位装置3的安装高度一致;
S3:UWB模块303开始工作,进行第一次的移动机器人位置确认,此时的定位精度在±50mm。
S4:位于移动机器人2附近的定位装置3开始启动视觉相机316,其中视觉相机316会对特征圆球308进行实时识别及跟踪。在S3中UWB模块303的初步指引之下,各个定位装置3之间会知道大致的相对位置,为视觉相机316扫描移动机器人2上的特征圆球308提供了方向导引,避免了盲目寻找。此时各个视觉相机316开始对移动机器人2上的特征圆球308进行追踪,移动机器人的定位精度在±20mm。
S5:在前两步的作用下,定位精度逐渐变优,此时视觉相机316会反馈更加准确的相对位置便于激光测距仪314对准特征圆球308。激光测距仪314工作时会发射出多束激光,当激光投射到特征圆球308的圆心时,几乎全部的激光会被原路返回,此时激光的回波强度较高。从而激光测距仪314可以根据激光的回波强度来微调俯仰角。移动机器人2附近的激光测距仪314对准位于移动机器人2上方的特征圆球308中心点后,此时移动机器人的定位精度在±2mm。
S6:当移动机器人2向前行走时,视觉相机316能够识别到位于移动机器人2上方的特征圆球308发生了位移,此时移动机器人2附近的视觉相机316会对其进行实时追踪。同时,在视觉相机316的辅助下激光测距仪314也能对-特征圆球308进行精确追踪。
整套定位装置3配备了8块太阳能充电板302,保证了模块的长时间稳定工作。
当高精度定位装置3使用完毕后,驱动板云台电机307开始工作,外侧支撑板301会将整个模块包裹住,确保精密仪器不被损伤。
以上所述,仅为本申请较佳的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本申请的保护范围之内。
- 用于孩童定位的便携式定位装置及定位系统、方法
- 定位方法、定位装置及定位系统
- 定位方法、定位装置及定位系统
- 一种户外人员定位装置、定位系统及定位方法
- 自组网定位导航通信终端与自组网定位导航通信系统
- 一种用于室内定位的多基组网UWB三维定位系统及其定位方法