一种毫米波雷达传感器系统中的检测区域规划方法及应用
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及一种智能设备规划方法及应用,具体为一种毫米波雷达传感器系统中的检测区域规划方法及应用,属于区域规划方法技术领域。
背景技术
雷达最早的应用是在军事上,其原理是产生并通过发射器发送一个频率随时间逐渐增加的信号,当这个信号遇到物体之后会反射回来,其时延是距离/光速数值的2倍,而返回来的波形和发出的波形之间有个频率差,这个频率差和时延呈线性关系,将这两个频率做一个减法,就可以得到二者频率的差频(差拍频率),由此就可以计算出物体与雷达的距离,在此基础上,不仅可以获知被测目标是否存在,还可以计算出目标的位置、方向、距离和速度等精确信息,毫米波雷达不容易受环境(温度、光线等)的影响,能够穿透塑料、墙板和衣服等非金属材料,这就决定了它可以在一些特定的应用场景中占据重要地位,与其他传感器相比,毫米波雷达不仅可以侦测到对象是否存在,还可以确定移动物体的方向、速度、尺寸、距离,甚至可以根据天线配置确定移动物体的准确位置,这些高精度的数据和丰富的信息,无疑会为毫米波雷达在工业和消费市场,特别是与物联网相关的领域赢得新的发展空间。
现有一个公开号为CN202210588607.0的公开专利,公开了一种一种基于毫米波雷达和机器视觉的路侧绿化监控方法,本发明利用视频检测技术能精准识别行人,结合毫米波雷达检测技术能够直接获取物体运动位置、速度信息的特点,二者技术取长补短,在保证检测精度的情况下,大大提高了对行人破坏路侧绿化带行为监测的效率。并且,本发明依托现有交通杆上的雷视一体机道路状态监控设备完成数据采集、行为判断、统计分析等功能,无需安装新设备,对现有绿化环境破坏小,施工成本低;且减少数据传输量,降低对城市绿化部门设备性能的要求。本发明增强了对路侧绿化带的监控力度,能够及时发现城市各处绿化问题,共建人与环境和谐共存的城市系统。
然而,毫米波雷达具有精度高能探测微小动作的特点,同时感测距离远、具有穿透非金属物体的能力,但是如果不加区域的限制,在房间一的传感器,可能检测到了隔壁房间二的运动动作,因而产生误动作,即使在房间一内,可能传感器正对窗户或者门,也容易感测到窗户外或者门外的对象的动作,也容易产生误动作,在同一房间内,例如客厅,有一个区域是“过道”功能,常有人走动,可能希望对这个“过道”区域不产生传感动作,只是通过传感器的角度难以实现规避,导致智能传感的目标捕捉准确性低。
有鉴于此特提出本发明,通过构建多个虚拟墙形成独立的检测区域空间,毫米波雷达传感器系统对独立的检测空间进行检测和动作,帮助提升系统的智能传感的对目标捕捉的准确性,而且可以定义多个目标范围,为智能家居系统更“智能”提供了更广阔的发展空间。
发明内容
本发明的目的就在于为了解决上述问题而提供一种毫米波雷达传感器系统中的检测区域规划方法及应用,通过构建多个虚拟墙形成独立的检测区域空间,帮助提升系统的智能传感的对目标捕捉的准确性。
本发明通过以下技术方案来实现上述目的,一种毫米波雷达传感器系统中的检测区域规划方法及应用,在对某一空间中的检测区域进行规划前,先将准备规划的空间整体进行空间采集,将毫米波雷达传感器安装并确定角度后,对空间进行扫描,毫米波雷达传感器系统包含射频模块、信号处理模块和供电电路部分,然后根据毫米波雷达传感器的回波信号得到的数据进行数据分析,以此得到准确的点云数据,根据点云数据获得毫米波雷达传感器所扫描的检测空间模拟图,然后根据用户指认空间中的墙面和地面,帮助建立空间模型,使空间模型更加完善,完善后用户在建立的空间中圈选需要动作的空间区域,选定后与传感器系统之间进行数据转换,确定检测区域。
进一步的,在对需要检测的空间进行空间采集之前,将毫米波雷达传感器安装在检测空间中较高处,高处方便毫米波雷达传感器对空间全范围的扫描,便于电磁波在空间内部全面且充分的发射扫描,确定安装位置并将毫米波雷达传感器安装完成后,调整毫米波雷达传感器的探测角度,主要将毫米波雷达传感器的电磁波发射方向调整至主要检测范围的扫描方向,随后对检测空间进行初始化空间扫描,通过手机APP连接毫米波雷达传感器,手机里的预扫描范围方便观察毫米波雷达传感器安装的角度是否合适,若传感器角度不足以对整个空间进行全面扫描时,重新调整毫米波雷达传感器的位置对检测空间再次扫描,在毫米波雷达传感器安装角度调整合适前,可以重复此步方法直至将毫米波雷达传感器角度调整合适,直至毫米波雷达传感器安装角度合适为止方可进行空间采集。
进一步的,在毫米波雷达传感器安装角度合适后,通过与毫米波雷达传感器连接的手机APP操作进入传感器运行软件初始化,毫米波雷达在检测空间发射电磁波,利用电磁波对覆盖的全部区域进行空间扫描,毫米波雷达系统具有阵列天线,利用X、Y、Z平面不同射频天线,毫米波雷达发射的电磁波被物体反射后形成的回波信号,可实现传感器系统所能探测到的空间场的3D数据扫描,对回波信号进行傅里叶变换处理和聚类分析,得到扫描目标对象的3D点云数据,3D点云数据形成的三维空间即为检测空间。
进一步的,对回波信号进行数据分析后,根据3D点云数据,在手机APP上显示出扫面区域的空间模拟图,空间模拟图将和真实空间以一比一的比例建模而成,在空间模拟图里抽象出多平面组合而成,然后让用户在空间模拟图里指认墙面和地面的具体位置,包括门窗的位置和尺寸,帮助对空间模拟图进行完善,有助于提高建模的真实性,完善后的空间模拟图将保存至数据库中。
进一步的,完善空间模拟图后,可以根据用户的不同需要,在手机APP里针对空间模拟图内部圈选出毫米波雷达传感器需要动作的范围,可以是一个独立范围,或者是几个不交叉相对独立的范围,范围之间不相交能够有效的防止目标捕捉的错误性。
进一步的,在圈选出范围后,手机APP根据扫描空间建立出的3D模型,与毫米波雷达传感器系统进行数据转换和更新模型数据,在手机APP的界面上建立起虚拟的垂直于“地面”的“墙”(平行于墙面),对应到毫米波雷达传感器系统里,对“墙”内的对象进行检测和动作,虚拟墙形成的封闭空间,帮助提高了目标捕捉的准确性。
进一步的,在对检测空间的范围以及动作全都设定完成后,将进入检测区域最后确定的页面,若中间有圈选的检测范围或者指定动作需要添加删减或更改,可以根据页面提示中的选择返回空间扫描阶段,若范围和动作都指定完成,则根据选择确定检测区域,然后便是进入正常传感检测功能的使用。
进一步的,一种毫米波雷达传感器系统中的检测区域规划应用,包括应用一:构建单个有效区域,在毫米波雷达系统内,建立虚拟的“墙”面,即视所圈选的检测范围为一个线型构造而成的封闭的圈,线型垂直向上将这个圈选的圈形成一个封闭的三维空间,这个封闭的空间即为构建的单个检测区域,此后毫米波雷达传感器只对该封闭空间内的动作有效,屏蔽对区域外的动作检测。
应用二:构建两个或多个有效区域,在毫米波雷达系统内,建立虚拟“墙”面,构建检测区域,2个区域,包括检测区域1、检测区域2和非检测区域,其中两个或多个检测区域之间不相交,为单个独立空间,在定义了不同的检测区域1-N后,对于不同检测的动作,可以在APP中关联不同的动作,例如:在检测空间内其中一个检测区域内检测到有人,可以打开灯光,具体打开哪些灯光、多少亮度、什么灯光的色温,则可以在智能家居与毫米波雷达传感器中做初始化设置来定义,在另一个检测区域内检测到有人,可以在手机APP里面定义关联动作,让推窗器推开窗户,使新鲜的空气进来,可以如果人在这个区域做双手闭合的动作,则让推窗器闭合窗户。
本发明的技术效果和优点:通过构建多个虚拟墙形成独立的检测区域空间,毫米波雷达传感器系统对独立的检测空间进行检测和动作,帮助提升系统的智能传感的对目标捕捉的准确性,而且可以定义多个目标范围,为智能家居系统更“智能”提供了更广阔的发展空间。
附图说明
图1为本发明的整体框架图;
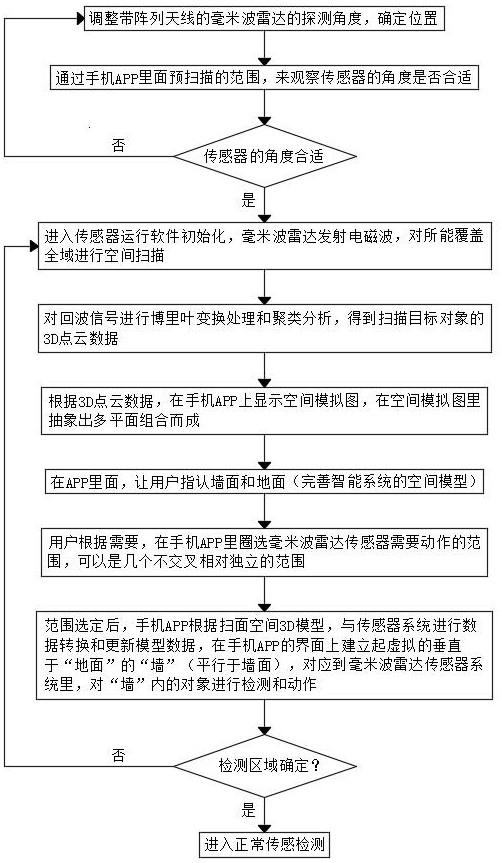
图2为本发明的检测流程图;
图3为本发明中单个有效区域的示意图;
图4为本发明中多个有效区域的示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-4所示,一种毫米波雷达传感器系统中的检测区域规划方法及应用,在对某一空间中的检测区域进行规划前,先将准备规划的空间整体进行空间采集,将毫米波雷达传感器安装并确定角度后,对空间进行扫描,然后根据毫米波雷达传感器的回波信号得到的数据进行数据分析,以此得到准确的点云数据,根据点云数据获得毫米波雷达传感器所扫描的检测空间模拟图,然后根据用户指认空间中的墙面和地面,帮助建立空间模型,使空间模型更加完善,完善后用户在建立的空间中圈选需要动作的空间区域,选定后与传感器系统之间进行数据转换,确定检测区域,通过将毫米波雷达传感器安装在指定扫描的空间,使用毫米波雷达传感器发射出的电磁波对该空间进行预扫描,毫米波导引头具有体积小、质量轻和空间分辨率高的特点,遇到空间中的实物后,电磁波将发生回波现象,以此判断空间大小和墙体的位置,帮助空间建模。
在对需要检测的空间进行空间采集之前,将毫米波雷达传感器安装在检测空间中较高处,确定安装位置并将毫米波雷达传感器安装完成后,调整毫米波雷达传感器的探测角度,随后对检测空间进行初始化空间扫描,通过手机APP连接毫米波雷达传感器,手机里的预扫描范围方便观察毫米波雷达传感器安装的角度是否合适,若传感器角度不足以对整个空间进行全面扫描时,重新调整毫米波雷达传感器的位置,直至毫米波雷达传感器安装角度合适为止方可进行空间采集。
安装好带阵列天线的毫米波雷达传感器底座,将毫米波雷达传感器卡在底座上,并调整传感器的探测角度,在毫米波雷达传感器安装角度合适后,通过与毫米波雷达传感器连接的手机APP操作进入传感器运行软件初始化,毫米波雷达在检测空间发射电磁波,利用电磁波对覆盖的全部区域进行空间扫描,毫米波雷达系统具有阵列天线,利用X、Y、Z平面不同射频天线,毫米波雷达发射的电磁波被物体反射后形成的回波信号,可实现传感器系统所能探测到的空间场的3D数据扫描,对回波信号进行傅里叶变换处理和聚类分析,得到扫描目标对象的3D点云数据。
对回波信号进行数据分析后,根据3D点云数据,在手机APP上显示出扫面区域的空间模拟图,在空间模拟图里抽象出多平面组合而成,然后让用户在空间模拟图里指认墙面和地面的具体位置,帮助对空间模拟图进行完善,完善后的空间模拟图将保存至数据库中,完善空间模拟图后,可以根据用户的不同需要,在手机APP里针对空间模拟图内部圈选出毫米波雷达传感器需要动作的范围,可以是一个独立范围,或者是几个不交叉相对独立的范围。
在圈选出范围后,手机APP根据扫描空间建立出的3D模型,与毫米波雷达传感器系统进行数据转换和更新模型数据,在手机APP的界面上建立起虚拟的垂直于“地面”的“墙”(平行于墙面),对应到毫米波雷达传感器系统里,对“墙”内的对象进行检测和动作,在对检测空间的范围以及动作全都设定完成后,将进入检测区域最后确定的页面,若中间有圈选的检测范围或者指定动作需要添加删减或更改,可以根据页面提示中的选择返回空间扫描阶段,若范围和动作都指定完成,则根据选择确定检测区域,然后便是进入正常传感检测功能的使用。
毫米波雷达传感器系统中的检测区域规划应用:
包括应用一:构建单个有效区域,在毫米波雷达系统内,建立虚拟的“墙”面,即视所圈选的检测范围为一个线型构造而成的封闭的圈,线型垂直向上将这个圈选的圈形成一个封闭的三维空间,这个封闭的空间即为构建的单个检测区域,此后毫米波雷达传感器只对该封闭空间内的动作有效,屏蔽对区域外的动作检测。
应用二:构建两个或多个有效区域,在毫米波雷达系统内,建立虚拟“墙”面,构建检测区域,2个区域,包括检测区域1、检测区域2和非检测区域,其中两个或多个检测区域之间不相交,为单个独立空间,在定义了不同的检测区域1-N后,对于不同检测的动作,可以在APP中关联不同的动作,例如:在检测空间内其中一个检测区域内检测到有人,可以打开灯光,具体打开哪些灯光、多少亮度、什么灯光的色温,则可以在智能家居与毫米波雷达传感器中做初始化设置来定义,在另一个检测区域内检测到有人,可以在手机APP里面定义关联动作,让推窗器推开窗户,使新鲜的空气进来,可以如果人在这个区域做双手闭合的动作,则让推窗器闭合窗户。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种基于毫米波雷达的路口并道辅助预警系统及方法
- 一种毫米波雷达天线系统及解耦方法
- 一种车载毫米波雷达传感器及车载毫米波雷达系统
- 一种低旁瓣毫米波雷达天线及毫米波雷达传感器系统