基于多站的子空间数据融合的直接定位与极化参数估计方法
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及基于多站的子空间数据融合的直接定位与极化参数估计方法。
背景技术
随着电子对抗和侦察打击一体化在现代电子战中的不断发展,无源定位与跟踪系统作为对有源探测系统的补充和完善,正朝着高精度、低载荷、快速化方向发展。在现代复杂的雷达电子对抗战争中,如何能远距离高效的侦察识别敌我目标辐射源成为了战争演进过程中至关重要的一环。此外,由于机载作战在其中占据了主要角色,故而记载运动平台无源定位系统发展的最为广泛和迅速。但传统的两步单站无源定位算法无法避免多项定位参数估计,且参数提取精度直接决定了定位解算方法的收敛性和定位精度。
发明内容
本发明的目的是为了解决传统的两步单站无源定位算法无法避免多项定位参数估计,导致定位的收敛性和定位精度差的问题。
基于多站的子空间数据融合的直接定位与极化参数估计方法具体过程为:
步骤一:生成多站的子空间数据矩阵;
步骤二:构造关于辐射源目标位置的代价极值函数;
步骤三:在二维平面内对代价极值函数进行谱峰搜索,基于谱峰确定目标位置,基于目标位置确定空域DOA估计结果;
步骤四:基于步骤三确定的空域DOA估计结果,恢复极化域的DOA参数。
本发明的有益效果为:
本发明的目的是能够高精度对多个信源进行直接定位的同时获得信源的极化DOA信息。本发明涉及的直接定位算法直接利用多个联合的观测站在多个观测时隙内阵列接收到的关于角度信息数据来实现定位。
同时,本发明获得信源的极化DOA信息,目的是将极化敏感阵列应用到无源定位中,极化敏感阵列具有较强的抗干扰能力、稳健的检测能力和较高的分辨能力,相较于传统算法中使用的标量阵列有更好的定位精度。
同时,本发明使用针对二维坐标的代价极值函数对目标位置进行估计。
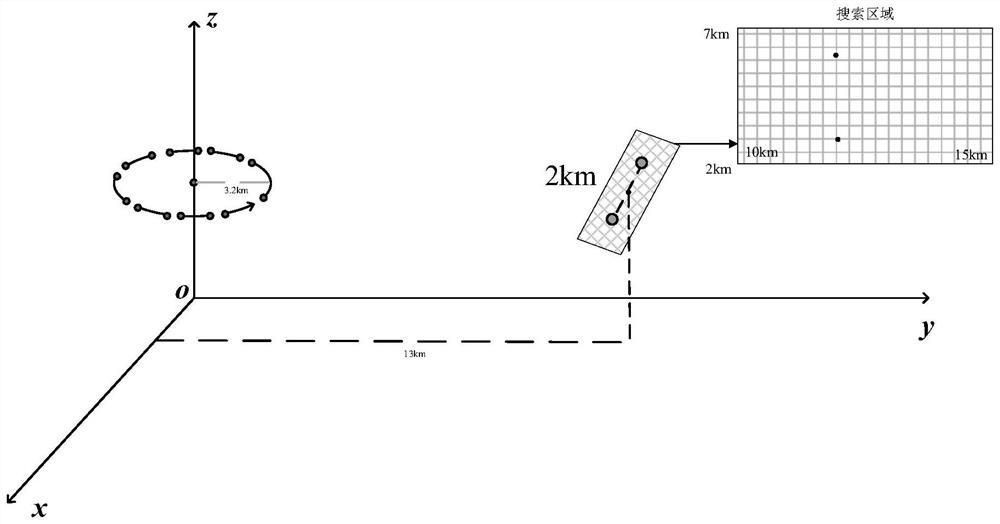
本发明实现了多站的子空间数据融合的直接定位与极化参数估计,多个观测站的位置图和目标位置图,以及搜索区域如图1所示。本发明显著提高了对多个辐射源直接定位的精度,且能获得信源的极化域DOA信息。
所述目标为雷达、飞机、导弹、地面辐射雷达等。
附图说明
图1是本发明使用的多个观测站的位置图和目标位置图以及搜索区域图;
图2是每一个观测站上使用的正交偶极子圆阵列的摆放图;
图3是空间定位的谱峰图;
图4是极化辅助角和极化相位角的估计结果图;
图5是定位均方根误差在不同算法下随信噪比的变化图;
图6是定位均方根误差在不同算法下随快拍数的变化图;
图7是使用单站对两个距离40m的信源观测得到的空间谱图;
图8是使用联合多站对两个距离40m的信源观测得到的空间谱图。
具体实施方式
具体实施方式一:本实施方式基于多站的子空间数据融合的直接定位与极化参数估计方法具体过程为:
步骤一:生成多站的子空间数据矩阵(公式3);
步骤二:构造关于辐射源目标位置的代价极值函数;
步骤三:在二维平面内对代价极值函数进行谱峰搜索,基于谱峰确定目标位置,基于目标位置确定空域DOA估计结果;
步骤四:基于步骤三确定的空域DOA估计结果,恢复极化域的DOA参数
所述目标为雷达、飞机、导弹、地面辐射雷达等。
具体实施方式二:本实施方式与具体实施方式一不同的是,所述步骤一中生成多站的子空间数据矩阵(公式3);具体过程为:
观测接收阵列由M个正交偶极子阵元组成,每个观测站上有一个观测接收阵列,接收阵列摆放如图2所示;
辐射源信号为远场入射窄带信号,即辐射源信号到达接收阵列位置可假设为平行的平面波信号;
观测接收阵列的远场区域内有Q个静止辐射源目标发射电磁波信号,信号通过直线传播到达接收阵列,将第q个静止辐射源目标位置坐标记作p
式中,正交偶极子阵元包括偶极子极化方向为x轴正向的子阵列和偶极子极化方向为y轴正向的子阵列;
将由偶极子极化方向为x轴正向的子阵列(前面M个正交偶极子阵元组成阵列,一个阵列分2个子阵列)接收信号设为x
由于偶极子极化方向为单一方向的子阵列接收信号并不能包括所有极化方向上的信源信息,故为了构造联合观测模型,对x
式中,A为导向矢量矩阵,N(t)为高斯白噪声,M为观测阵列中正交偶极子阵元个数;t为t时刻;
其中DOA为波达方向估计。
其它步骤及参数与具体实施方式一相同。
具体实施方式三:本实施方式与具体实施方式一或二不同的是,所述极化域导向矢量a
式中,j为虚数单位,j
其它步骤及参数与具体实施方式一或二相同。
具体实施方式四:本实施方式与具体实施方式一至三之一不同的是,所述第k个观测站的空域导向矢量a
其它步骤及参数与具体实施方式一至三之一相同。
具体实施方式五:本实施方式与具体实施方式一至四之一不同的是,所述步骤二中构造关于辐射源目标位置的代价极值函数;具体过程为:
定义第k个观测站的观测信号r
式中,R
可得到第k个观测站的观测信号r
式中,
由阵列信号处理相关理论,可以证明R
对第k个观测站的观测信号r
式中,Σ
由以上推导可知,假设噪声为高斯白噪声时,有Σ
式中,I
综上得到U
由噪声子空间U
其它步骤及参数与具体实施方式一至四之一相同。
具体实施方式六:本实施方式与具体实施方式一至五之一不同的是,所述代价极值函数P
式中,a
x
可以通过上式作为目标函数在二维平面内搜索辐射源目标位置,目标函数的峰值即对应目标辐射源位置估计。
其它步骤及参数与具体实施方式一至五之一相同。
具体实施方式七:本实施方式与具体实施方式一至六之一不同的是,所述a
其中φ
其它步骤及参数与具体实施方式一至六之一相同。
具体实施方式八:本实施方式与具体实施方式一至七之一不同的是,所述步骤三中在二维平面内对代价极值函数进行谱峰搜索,基于谱峰确定目标位置,基于目标位置确定空域DOA估计结果;具体过程为:
如图1所示,在目标信号的期望位置附近对代价极值函数进行关于辐射源位置的二维谱峰搜索;
最终将所有观测站的代价极值函数取对数再求和,得到的谱峰的横纵坐标即为目标坐标;
最终可以根据得到的目标位置和某个观测站的位置的差值计算出空域DOA估计结果
(目标x轴位置和某个观测站的x轴位置差值)与(目标y轴位置和某个观测站的y轴位置差值)的比值为空域DOA估计结果
其它步骤及参数与具体实施方式一至七之一相同。
具体实施方式九:本实施方式与具体实施方式一至八之一不同的是,所述步骤四中基于步骤三确定的空域DOA估计结果,恢复极化域的DOA参数
下面采用矩阵向量化的方法进行极化参数的恢复,将第k个观测站接收到的信号x
R
式中,R
x
x
A
z、t′为常数,1≤z,t′≤2;
A
A
R
其中,目标信号协方差矩阵
对R
式中,r
记
式中,
其它步骤及参数与具体实施方式一至八之一相同。
实施例:
下面结合附图与具体实施方式对本发明作进一步详细描述。
如图2所示,本实例采用的天线阵列为7阵元一维正交偶极子均匀阵列,阵元间距设置为信号的半波长。本发明算法在二维坐标谱峰搜索时对x和y轴的搜索步长均为10m,作为对比算法的两步交叉定位MUSIC算法搜索间隔设为1°。用于对比的性能指标主要包括:均方根误差(Root Mean Square Error,RMSE):
所述目标为雷达、飞机、导弹、地面辐射雷达等。
步骤(1):生成多站的子空间数据矩阵
假设有多个载有单阵列的机载平台,接收信号来自地面远场窄带静止辐射源,其目标位置矢量为x
第k个观测站上的阵列天线接收到辐射源的信号模型为式(13):
式中:k=1,2,…,K;r
因此,统一的接收的N快拍数据信号模型可进一步写为式(15):
r=A(x
式中,r为观测站接收到辐射源的信号,
式中,
步骤(2):构造关于辐射源位置的代价极值函数
根据第k个观测站上的天线阵列接收到的N次采样快拍数接收信号r
对所得平均自相关矩阵R
对目标函数做二维坐标峰值搜索,获得目标的坐标位置。
步骤(3):在二维平面内对目标函数进行谱峰搜索
如图1所示,在目标信号的期望位置附近对目标函数进行关于辐射源位置的二维谱峰搜索。最终将所有观测站的谱函数取对数再求和,得到的谱峰的横纵坐标即为目标坐标。最终可以根据得到的目标位置和某个观测点的位置的差值计算出空域DOA估计结果
步骤(4):恢复极化域的DOA参数
将接收信号的协方差矩阵向量化,结合最小二乘法恢复信源的极化域DOA参数。
参照图3所示的极化角估计结果。在信噪比为10dB,快拍数为1000的时候,目标位置如图1所示。发明提出的谱函数的峰值都较为明显,验证了本发明算法的可行性。
参照图4所示的均方根误差在不同算法下随信噪比的变化,仿真设置同图3。能看出本发明算法能在精准定位的同时,得到辐射源的极化角度信息,并具有较好的估计精度。
参照图5所示的均方根误差在不同算法下随信噪比的变化。在快拍数固定为2000的时候,对单个目标进行定位,目标距离观测站10km。在各个信噪比下各进行200次蒙特卡洛实验,可以看到本发明算法的RMSE均小于两部交叉定位算法,估计性能要更好。
参照图6所示的均方根误差在不同算法下随快拍数的变化。在固定信噪比为20dB的时候,对单个目标进行定位,目标距离观测站10km。在各个快拍数下各进行200次蒙特卡洛实验,可以看出本发明算法的RMSE均小于两部交叉定位算法,估计性能要更好。
参照图7和图8所示的分辨率在单站和多站下的对比,固定信噪比为20dB,快拍数为2000,使用单个观测站和30个联合观测站对两个目标进行定位,两目标距离40m,单个观测站的位置在联合观测站距离被信源最近观测站处。可以看出本发明提出的联合多站能估计出谱峰的位置,但是单站已经无法分辨开两个谱峰。验证了本发明所提出的联合多站的优越性。
上述为本发明特举之实施例,并非用以限定本发明。本发明提供的无网格DOA估计方法同样适用于其他非均匀和不同阵元的阵列。在不脱离本发明的实质和范围内,可做些许的调整和优化,以本发明的保护范围以权利要求为准。
综上,本发明针对正交偶极子天线阵列提出一种基于多站的子空间数据融合的直接定位与极化参数估计方法,该算法以联合多站直接定位作为基础,结合极化敏感阵列,结合极化敏感阵列,首先将不同极化方向的两个子阵接收到的多快拍矩阵求和,通过处理该矩阵获得噪声子空间和信号子空间,并构筑出谱函数,通过二维坐标的谱峰搜索获得目标辐射源的定位,并结合协方差矩阵的向量化和最小二乘法恢复出目标辐射源的极化域参数。并对比了两步定位MUSIC算法,验证了本发明算法在估计精度上的优势。
本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,本领域技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
- 一种基于降维加权子空间数据融合的非圆源直接定位方法
- 基于非圆多嵌套阵降维子空间数据融合的直接定位方法