水陆两栖水下机器人投放回收装置
文献发布时间:2023-06-19 18:30:43
技术领域
本发明属于水下机器人投放技术领域,具体涉及一种水陆两栖水下机器人投放回收装置。
背景技术
21世纪是人类向海洋进军的世纪。深海作为人类尚未开发的宝地和高技术领域之一,已经成为各国的重要战略目标,也是国际上激烈竞争的焦点之一。因此越来越多种类的水下机器人相继问世并投入使用。
现如今水下机器人的投放回收装置大多都是应用环境单一,不能在海上与陆地上分别独立完成投放工作,同时现有的水陆两栖船大都靠履带形式,这使得在海上航行不方便,并且在投放时大都应用投放框架,效率较低。
发明内容
本发明为了解决上述背景技术存在的问题,进而提供一种水陆两栖水下机器人投放回收装置,通过投放回收输送带与辅助投放回收结构相互配合,可以在任意环境下进行高效的投放回收工作。
本发明所采取的技术方案是:一种水陆两栖水下机器人投放回收装置,包括船体、投放回收输送带、支架及辅助投放回收结构;所述投放回收输送带安装在船体上,投放回收输送带用于进行水下机器人的投放回收工作,所述支架安装在船体上,所述辅助投放回收结构安装在支架上,辅助投放回收结构用于与投放回收输送带相互配合,对水下机器人进行搬运、调节,或者能够单独进行投放回收工作。
本发明与现有技术相比具有以下有益效果:
1.本发明通过投放回收输送带可以对水下机器人进行高效的投放回收工作,使机器人直接下水,大大提高工作效率,并且在高效的同时,保障了投放位置的准确性与安全性。进行回收工作时,更加可以通过辅助投放回收结构进行配合,使水下机器人安全准确的回到投放回收输送带上,完美实现回收工作。
2.本发明可以通过船体下方的螺旋轮实现在陆地及海洋中进行灵活运动,能够使投放过程更加的方便快捷。
3.本发明的辅助投放回收装置能使本装置在陆地上实现高效的平稳投放与回收工作。也可在海上与投放回收输送带相互配合,使本发明回收更加便捷高效,大大提高回收时水下机器人的安全性。
4.本发明中的辅助投放回收结构通过滑槽与支架相连,可以根据使用者需要来自由调节位置,可以实现对水下机器人的搬运、调节、运输与投放、回收集于一体,高效且便捷。应用辅助投放回收结构进行工作时可对投放方向进行自由灵活的调节。在投放时可通过旋转平台组件进行大幅度转动,可通过液压臂进行伸长缩短,且通过侧壁连接的液压杆实现液压臂的上扬与下调。这样保障了投放过程中不受方位的限制,能更加符合投放者的需求。
5.本发明还设有三个高压喷头,可对返航的水下机器人进行清洗,防止海水对其表面的腐蚀,能最大限度的延长机器人使用寿命;此外本发明所用的电磁固定器,通过继电器对电磁铁进行控制,能更有效的使机器人与回收装置进行连接,最大限度的减少了回收缆绳相互缠绕等问题。
附图说明
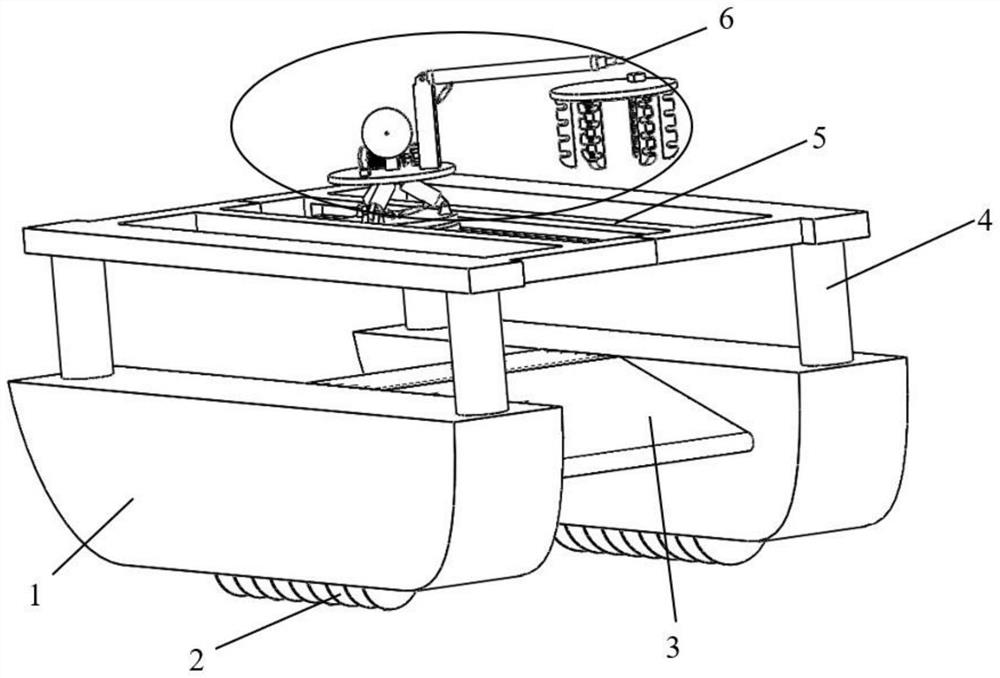
图1是本发明结构示意图;
图2是本发明横剖面结构示意图;
图3是本发明辅助投放回收结构示意图;
图4是本发明投放组件结构示意图;
图5是本发明转动装置结构示意图;
图6是本发明仰视图;
其中:1、船体;2、螺旋轮;3、投放回收输送带;4、支架;5、滑槽;6、辅助投放回收结构;601、第一平台;602、转动装置;603、第二平台;604、支座;605、平衡液压杆;606、支柱;607、内置滑轮;608、第三平台;609、电机;6010、定量马达一;6011、液压泵;6012、绞盘;6013、圆环;6014、液压杆;6015、液压臂;6016、水泵;6017、液压软体抓手;6018、电磁固定装置;6019、高压喷头;6020、水平感应器;6021、从动齿轮;6022、定量马达二;6023、主动齿轮;6024、推力球轴承。
具体实施方式
为了更好地了解本发明的目的、结构及功能,下面结合附图,对本发明的做进一步详细的描述。
参照图1~图6所示,本发明一种水陆两栖水下机器人投放回收装置,包括船体1、投放回收输送带3、支架4及辅助投放回收结构6;所述投放回收输送带3安装在船体1上,投放回收输送带3用于进行水下机器人的投放回收工作,所述支架4通过焊接的方式安装在船体1上,所述辅助投放回收结构6安装在支架4上,辅助投放回收结构6用于与投放回收输送带3相互配合,对水下机器人进行搬运、调节等功能,或者能够单独进行投放回收工作。
其中:如图1所示,所述支架4上端设有平台板,并在平台板上沿船体1长度方向设置滑槽5,所述辅助投放回收结构6通过滑槽5与支架4滑动连接,实现辅助投放回收结构6的自由滚动滑动。
如图3~图5所示,所述辅助投放回收结构6包括旋转平台组件、平衡调节组件、吊装组件及投放组件;所述旋转平台组件与滑槽5通过滑动滚轮进行滑动连接,在无需滑动时通过滚轮卡扣进行固定,保障了装置稳定性。所述平衡调节组件安装在旋转平台组件上,所述吊装组件安装在平衡调节组件上,所述投放组件安装在吊装组件上。
如图3所示,所述旋转平台组件包括第一平台601、第二平台603及转动装置602;所述第二平台603与第一平台601通过转动装置602连接,可实现辅助投放回收结构6的整体转动。
如图5所示,所述转动装置602包括主动齿轮6023、定量马达二6022、从动齿轮6021及推力球轴承6024;所述第一平台601和第二平台603之间通过推力球轴承6024转动连接,所述从动齿轮6021固定套装在推力球轴承6024的上端钢圈上,与所述从动齿轮6021啮合的主动齿轮6023由定量马达二6022驱动,所述主动齿轮6023转动安装在第一平台601上,所述定量马达二6022安装在第一平台601上。
转动装置602是由定量马达二6022通过主动齿轮6023驱动从动齿轮6021转动,从动齿轮6021带动第二平台603转动。
如图3所示,所述平衡调节组件包括第三平台608及三个平衡装置;所述第三平台608与第二平台603通过三个平衡装置进行连接,每个所述平衡装置均包括支座604、平衡液压杆605、支柱606及内置滑轮607;所述支座604下端固定在第二平台603上,所述支柱606下端与支座604上端通过销轴连接,能够实现随销轴转动,支柱606上端连接有内置滑轮607,所述内置滑轮607滑动安装在第三平台608底面的凹槽轨道中,所述平衡液压杆605一端与第二平台603铰接,平衡液压杆605另一端通过销轴连接在支柱606侧壁,可对支柱606进行上扬与下调,三个平衡装置配合使用,能够实现平衡调节工作。
如图3所示,所述吊装组件包括电机609、定量马达一6010、液压泵6011、绞盘6012、液压杆6014、液压臂6015;所述电机609、液压泵6011、水平感应器6020和定量马达一6010均安装在第三平台608上,所述电机609与液压泵6011连接,电机609通电之后可带动液压泵6011进行工作,进而带动整个机构的液压装置进行运行。所述定量马达一6010的输出端与绞盘6012连接,定量马达一6010通过液压泵6011带来的动力带动绞盘6012运转,可实现收绳、放绳工作;所述液压臂6015一端与第三平台608上设置的立柱通过销轴连接,并且通过设置在液压臂6015和立柱之间的液压杆6014对液压臂6015进行上扬与下调运作,同时液压臂6015采用液压伸缩杆结构,其本身可以进行伸长缩短,可实现连接臂的多方位调节;所述绞盘6012中的揽绳通过液压臂6015上设有的数个圆环6013与投放组件的投放框架连接。
如图3、图4所示,所述投放组件包括水泵6016、电磁固定装置6018、高压喷头6019及多个液压软体抓手6017;所述多个液压软体抓手6017安装在投放框架上,能够安全固定机器人,所述投放框架顶部设有水泵6016,水泵6016通过水管连接在投放框架内顶部的三个高压喷头6019中,可实现高压喷头清洗工作,所述投放框架上设有电磁固定装置6018,可实现投放使固定更加稳固、回收更加便捷,避免了回收缆绳相互缠绕等问题。
多个液压软体抓手6017的数量可以为三个或者六个。
如图2所示,所述投放回收输送带3包括主动轮301、皮带303及多个从动轮302;所述船体1由两个结构相同的分体构成,所述主动轮301和多个从动轮302呈梯形排布,并转动安装在两个分体之间,主动轮301和多个从动轮302之间通过皮带303传动连接,所述主动轮301通过驱动电机进行驱动。同时所述主动轮301与从动轮302呈梯形排布,能够使传动更加有力。同时能够保证投放回收输送带3能够更好的实现投放回收功能,能够使所需投放的水下机器人更加稳定的通过揽绳固定在投放回收输送带3的上边平面上,确保了所需投放装置的安全性。
如图1、图2、图6所示,每个所述分体下端安装两个反向的螺旋轮2可实现装置在海上与陆地上的灵活运动,可以将本装置移动到所需投放地点,实现对水下机器人的精准定点投放。
工作过程如下:
本投放回收装置在运行时,通过螺旋轮2对转,实现装置在陆地上运行,通过螺旋轮2旋转,为装置在海上运行提供动力。在进行投放时,应用辅助投放回收结构6在滑槽5中的自由滑动将机器人装载进本投放装置,若进行海上投放工作,则将其放在投放回收输送带3上固定好后进行运输,之后将本装置运行到海上,运行投放回收输送带3对机器人进行精准安全的投放;若在陆地上进行投放工作,则将其固定在投放框架,应用液压软体抓手6017进行表面贴合固定,同时电磁固定装置6018使固定更加稳固,确保水下机器人不会被撞坏。可通过第一平台601与第二平台603之间的转动装置602对投放装置进行转动调整,可通过液压臂6015进行伸长缩短来使投放框架实现投放距离远近的调整,同时可用液压杆6014对液压臂6015进行上扬下调,对投放框架的投放位置进行更进一步的调整。
在投放以及运输过程中,如果第三平台608出现倾斜,那么会触发水平感应器6020,之后对平衡调节组件里面的支柱606位置进行调整,来实现平台回复平衡的功能。支柱606位置变换是通过平衡液压杆605对支柱606的上扬下调来实现的。通过平衡液压杆605的收缩、伸长带动支柱606顶部连接的内置滑轮607在轨道内运动,从而实现支柱606位置的调整,使第三平台608维持水平稳定状态。
在回收过程中,可直接将水下机器人运行至本装置的投放回收输送带3上进行高效的回收。也可以将液压软体抓手6017张开,通过电磁固定装置6018来进行实现。电磁固定装置6018通过操纵者手中的继电器来实现电磁铁的磁性。在运输过程中,打开继电器,使装置固定更加稳固;当投放时,关闭继电器,使电磁铁磁性消失,进行平稳投放;当回收时,打开继电器,使电磁铁具有很强的磁性,这样会使电磁铁与水下机器人紧紧连接在一起,这样会使回收更加的便捷。将水下机器人回收进投放框架之后,开启水泵6016会使高压喷头6019进行工作,对刚刚回收的水下机器人表面海水进行清洗,能够很好的防止海水对水下机器人外壳的侵蚀,有效的延长水下机器人的使用寿命。
可以理解,本发明是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本发明的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本发明的精神和范围。因此,本发明不受此处所公开的具体实施例的限制,所有落入本申请的权利要求范围内的实施例都属于本发明所保护的范围内。
- 水下机器人的投放和回收装置以及系统
- 一种水下机器人投放回收装置