一种基于驾驶员风格识别的纯电动汽车制动能量回收方法
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及纯电动车辆控制技术领域,特别是涉及一种基于驾驶员风格识别的纯电动汽车制动能量回收方法。
背景技术
随着汽车智能化的起步,人们对于汽车良好的体验的需求,使得人们希望汽车能够根据自己的状态和需求定制对应的服务内容和辅助驾驶,准确适应驾驶员风格,为驾驶员提供更人性化的服务和更安全舒适的辅助驾驶有极其重要的作用。制动能量回收是提高电动汽车能量利用效率的重要手段,当电机在发电状态运行时,即可产生制动扭矩,实现汽车减速,同时将汽车的部分制动能量转换为电能,给动力电池充电,从而提高汽车的续驶里程。
授权公告号CN 108081961 B的中国专利,公开了“一种制动能量回收控制方法、装置及电动汽车”,该方法包括:根据制动踏板位移确定驾驶员的总需求制动力,并结合电机可提供的最大制动力和制动力分配的判断阈值确定电机的需求制动力,进而控制电机进行制动能量回收。该方法在不改变驾驶员总需求制动力的前提下最大程度的进行电制动回收,能够实现更高的能量回收效率。
授权公告号CN 109278566 B的中国专利,公开了“后轮驱动纯电动车辆制动能量回收控制方法及装置”,该方法包括:在汽车制动过程中,控制机械制动力和再生制动力分配,在保证制动安全和制动效能的基础上,最大限度的提升再生制动力分配系数,充分利用电机的馈电能力回收制动过程中损耗的能量给动力电池充电,提升制动能量回收效率,减少制动能量损耗,优化车辆续驶里程。
上述现有技术虽然也是从制动能量回收的角度出发,达到提升纯电动车辆续驶里程的效果,但现有技术的再生制动能量回收方法并没有考虑到不同驾驶员风格的因素,不能满足驾驶员对舒适性和驾驶体验感觉的需求。
发明内容
为弥补现有技术的不足,本发明的目的在于提出一种基于驾驶员风格识别的纯电动车制动能量回收方法及系统,能够识别驾驶员不同的驾驶风格,并根据其驾驶风格匹配最佳的制动能量回收模式,增加纯电动车辆行驶里程,提升驾驶员的体验感觉,实现纯电动车辆能耗经济性。
本发明的目的通过以下技术方案实现:
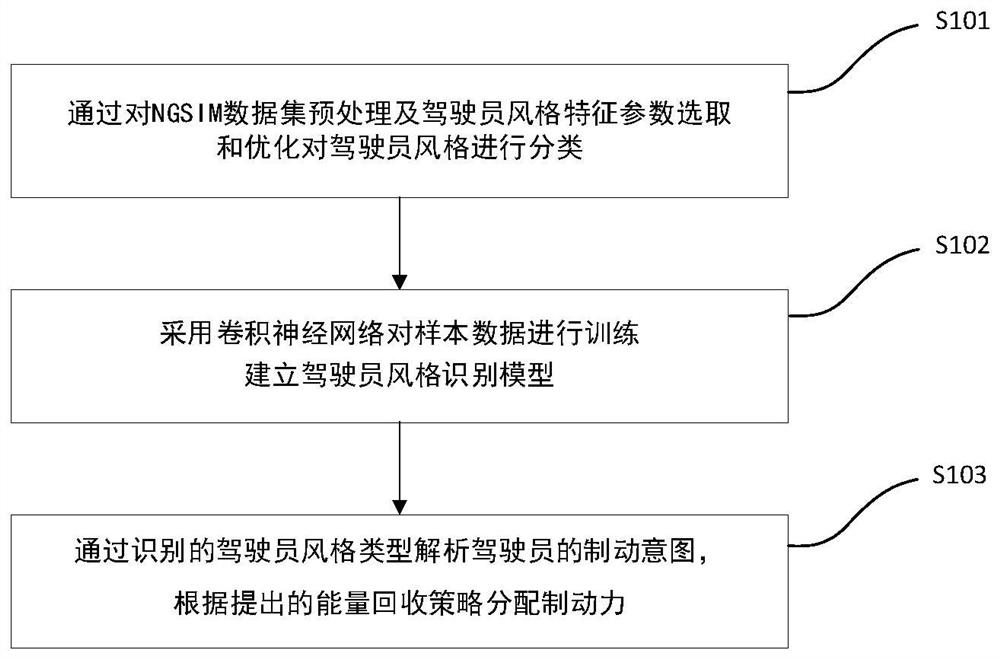
一种基于驾驶员风格识别的纯电动车制动能量回收方法及系统,包括以下步骤:
S101:通过对NGSIM数据集预处理及驾驶员风格特征参数选取和优化对驾驶员风格进行分类;
S102:采用卷积神经网络对样本数据进行训练,建立驾驶员风格识别模型;
S103:通过驾驶员风格类型解析驾驶员的制动意图,根据提出的能量回收策略分配制动力,控制电机进行能量回收。
进一步地,所述步骤S101具体包括以下步骤:
S1011:将NGSIM数据集中的异常数据去除,采用Savitzky-Golay滤波算法对数据流进行平滑除噪处理,并实用max-min方法进行标准化。Savitzky-Golay滤波算法函数式为:
其中
S1012:选取平均车速v
x
其中x
S1013:根据提取载荷平方和大于75%的指标选取平均车速v
其中x
进一步地,所述步骤S102具体包括以下步骤:
S1021:给定输入行驶数据集,设定惩罚函数L(y,y^)判断输出预测值与实际值的误差,并利用Adam优化器对其学习率调整和梯度估计修正;
S1022:选择卷积核尺寸为3、数目为(16,64,128),选择Relu作为激活函数进行加速,设定全连接层神经元数量为5,搭建基于CNN卷积神经网络的驾驶员风格识别模型;
S1023:采用交叉熵(categorical crossenitropy)形式惩罚函数和准确度(accuracy)进行有效性评估并验证,交叉熵形式惩罚函数公式为:
其中,N为数据总量,K为目标任务数,y
准确度(accuracy)公式为:
进一步地,所述步骤S103具体包括以下步骤:
S1031:将驾驶员行驶数据输入基于驾驶员风格识别模型,得到当前驾驶员所属风格;
S1032:根据所识别的驾驶员风格类型解析驾驶员的制动意图,获取目标制动力;
S1033:在满足I曲线和ECE法规的情况下,采用最大能量回收控制策略,并对前、后轴制动力和机械、摩擦制动力进行分配,I曲线表达式为:
其中F
ECE法规表达式为:
其中z为制动强度。
S1034:控制电机进行制动能量回收。
本发明的有益效果在于:与现有技术相比:
(1)本发明引用NGSIM数据集信息进行特征信息的选取,对驾驶员数据进行预处理,并进行强关联数据的选取,用强关联的特征数据进行驾驶员风格分类,从而减小模型计算量,提高了方法的识别速度。
(2)本发明利用聚类算法对驾驶员特征信息进行分类,并采用卷积神经网络对样本数据训练,建立驾驶员风格识别模型,提高了驾驶员风格的识别精度。
(3)本发明能够识别驾驶员不同的驾驶风格,并根据其驾驶风格解析驾驶员的制动意图,大大提升系统集成性和驾驶体验感觉。
本发明能够在保证驾驶员舒适性的前提下,采用最大制动能量回收控制策略进行能量回收,增加纯电动车辆行驶里程,实现纯电动车辆能耗经济性。
附图说明
本发明实施例的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
图1为本发明实施例的基于驾驶员风格识别的纯电动汽车制动能量回收方法的流程图;
图2为步骤S101的具体流程图;
图3为驾驶风格特征参数分布结果图;
图4为训练集与验证集准确率变化图;
图5为不同驾驶风格车辆需求制动力与制动踏板位移的关系曲线图;
图6为一实施例中车辆制动力分配曲线图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明实施例提出一种基于驾驶员风格识别的纯电动汽车制动能量回收方法,图1为本发明实施例所述方法的流程图。
一种基于驾驶员风格识别的纯电动汽车制动能量回收方法,包括以下步骤:
S101:通过对NGSIM数据集预处理及驾驶员风格特征参数选取和优化对驾驶员风格进行分类;
S102:采用卷积神经网络对样本数据进行训练,建立驾驶员风格识别模型;
S103:通过驾驶员风格类型解析驾驶员的制动意图,根据提出的能量回收策略分配制动力,控制电机进行能量回收。
进一步地,作为一种优选的实现方式,如图2所示,所述步骤S101具体包括以下步骤:
S1011:将NGSIM数据集中的异常数据去除,采用Savitzky-Golay滤波算法对数据集中的局部x和局部y值进行平滑除噪处理,并重新计算速度和加速度,使用矩阵表达式进行优化。Savitzky-Golay滤波算法函数式为:
其中
进一步地,并使用mix-max标准化方法将数据集中不同特征参数的量纲及单位进行匹配。函数公式为:
其中max(x)为向量x的最大值,min(x)为向量x的最小值。
S1012:选取平均车速v
x
其中x
进一步地,假设每个公共因子对每个特征变量的影响是线性关系,采用Z-score标准化方法对样本数据进行标准化处理:
x
其中x
进一步地,经推导得,公共因子可表示为:
F
计算出的公共因子为标准化数据,均值为0,标准差为1.
S1013:根据提取载荷平方和大于75%的指标选取平均车速v
其中x
进一步地,将样本数据集和初始聚类数k作为输入,在样本集中随机选择初始聚类中心点(c
需要说明的是,由驾驶风格特征参数分布结果可知,如图3所示,类别1驾驶风格为谨慎型人格,类别2驾驶风格为普通型人格,类别3驾驶风格为激进型人格。
S1014:使用SPSS软件对聚类结果进行分析,得到驾驶员风格分类结果。
进一步地,所述步骤S102具体包括以下步骤:
S1021:给定输入行驶数据集,设定惩罚函数L(y,y^)判断输出预测值与实际值的误差,分别计算每一层得净输入值z
其中
S1022:选择卷积核尺寸为3、数目为(16,64,128),选择Relu作为激活函数进行加速,设定全连接层神经元数量为5,搭建基于CNN卷积神经网络的驾驶员风格识别模型;
S1023:采用交叉熵(categorical crossenitropy)形式惩罚函数和准确度(accuracy)进行有效性评估并验证,当p
其中,N为数据总量,K为目标任务数,y
准确度(accuracy)公式为:
进一步地,训练数据集及验证数据集准确率变化结果,如图4所示,可以发现迭代次数越多,训练准确率及验证准确率在90%以上,证明了驾驶员风格识别模型的有效性。
所述步骤S103具体包括以下步骤:
S1031:将驾驶员行驶数据输入基于驾驶员风格识别模型,得到当前驾驶员所属风格;
需要说明的是,不同驾驶风格结果对应制动踏板位移与需求制动力的预设对应关系是预先建立的。汽车制动时,制动踏板推动主缸推杆的位移变化,主缸推杆推动液压腔活塞的变化,导致主缸压力和前后轮缸压力的变化(即轮缸的“p-V特性”),前后轮轮缸压力变化直接导致制动力的变化。因此,本发明实施例建立制动踏板位移和驾驶员总的需求制动力的对应关系,如图5所示,实际需求压力需要根据实车具体标定。
S1032:根据所识别的驾驶员风格类型解析驾驶员的制动意图,获取目标制动力,同时整车控制器根据接受的电池状态信号、车速信号、制动强度需求信号,判断车辆是否满足进入制动能量回收模式的条件需求;
需要说明的是,若电池SOC信号大于允许回收能量的最高荷电状态SOC
S1033:当车辆满足进入制动能量回收模式的条件需求,在满足I曲线和ECE法规的情况下,采用最大能量回收控制策略,并对前、后轴制动力和机械、摩擦制动力进行分配,如图6所示,具体制动力分配策略如下:
当0<z≤0.2(ECE下边界线与横轴交点)时,总制动力完全由前轴电制动力提供:
当0.2<z≤0.35(ECE下边界线与制动强度z=0.5时对应的f线的交点)时,总制动力按ECE法规下边界线分配:
当0.35<z≤0.5时,总制动力沿f线分配:
当z>0.5时,总制动力沿I曲线分配:
其中F
需要说明的是,制动力分配时,本发明主要考虑以下方面的约束:
1)为防止车轮抱死发生危险的侧滑,车辆实际前、后制动力分配线应总是在理想制动力分配曲线(I曲线)的下方;
2)为最大程度的进行制动能量回收,本发明实施例在在满足I曲线和ECE法规的前提下,设计和控制将尽可能多的制动力分配在前轮,也就是总制动力分布将沿着ECE法规下边界曲线。
S1034:控制电机进行制动能量回收。
需要说明的是,当电机制动力最大值F
应当理解,本发明的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。例如,如果用硬件来实现,和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(PGA),现场可编程门阵列(FPGA)等。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
- 一种纯电动汽车并联式制动能量回收控制方法及系统
- 一种基于道路信息的纯电动汽车制动能量回收方法
- 一种基于DCT的纯电动汽车制动能量回收控制系统及方法