用于照相机的致动器
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及一种用于照相机的致动器,更具体地涉及一种能够实现自动对焦功能和手抖动校正功能的致动器。
背景技术
随着用于图像处理的硬件技术的发展和用户对图像拍摄的需求的增加,自动对焦(AF,Auto Focus)、光学图像稳定(OIS)等的功能不仅在独立的照相机装置中实现,而且,还在安装于移动终端,诸如移动电话、智能手机等的摄像头模块中实现。
自动对焦(自动调焦)功能是指通过使带有透镜等的承载架在光轴方向上线性移动来调整与被摄体的焦距,从而在设置于透镜后端的图像传感器(CMOS、CCD等)中生成清晰图像的功能。
另外,手抖动校正功能是指通过在由于手抖动使透镜抖动时,沿补偿该抖动的方向自适应地移动带有透镜的等的承载架而提高图像清晰度的功能。
在实现AF功能或OIS功能的一种典型的方法中,一种方法就是在移动体(承载架)上设置磁体(线圈),在固定体(壳体或其他另一种形式的承载架等)上设置线圈(磁体),然后在线圈与磁体之间产生电磁力,以使移动体在光轴方向上或垂直于光轴的方向上移动。
另一方面,为了实现承载架的物理支撑和承载架的位置恢复等,还存在一种将承载架连接到线材的装置,然而,在采用这种装置的情况下,则由于内部和外部环境,线材的物理性质可能容易变形,因此容易降低驱动精度,尤其,在因透镜的高规格而导致透镜的重量和尺寸增大时,驱动性能可能会进一步劣化。
为了解决这种线材(wire)类型的问题,最近,采用了如下方式:在移动体和固定体之间插设滚珠(ball),以移动体和固定体之间保持适当的间隔距离,并且,通过滚珠的旋转运动以及与滚珠的点接触使摩擦力最小化,更灵活且精确地移动承载架。
在集成有AF功能和OIS功能的装置或致动器中,AF必须在光轴方向上移动,而OIS必须在垂直于光轴的方向上移动,因此,AF承载架和OIS承载架由相互叠置的复合物理结构实现。
由于AF承载架在光轴方向上移动,在AF承载架与壳体之间保持着一定的间隙。然而,由于OIS承载架在垂直于光轴的方向上移动,根据OIS承载架的移动,OIS承载架和AF承载架之间的间隙发生变化,由此,施加到磁体的电磁力也有变化。
此时,根据OIS承载架的移动,在使OIS承载架与AF承载架最远的区间,磁体对OIS承载架提供驱动力有其局限性。
另外,最近呈现如下趋势:在复合结合OIS承载架和AF承载架的致动器以及包括其的摄像模块中,由于透镜模块的高重量化或图像传感器的高像素化等,导致增加移动目标体的重量。然而,为了符合这种趋势,由于移动摄像模块的空间有限,需要开发能够防止在有限空间中的构成元件之间发生碰撞并增加驱动力的技术。
发明内容
发明要解决的技术问题
为了解决上述的问题,本发明的目的在于,提供一种用于照相机的致动器,能够防止在有限空间中的构成元件之间发生碰撞并增加驱动力。
并且,本发明的目的在于,提供一种用于照相机的致动器,根据OIS承载架的移动,在使OIS承载架与AF承载架最远的区间,能够对OIS承载架提供足够的驱动力。
并且,本发明的目的在于,提供一种用于照相机的致动器,能够通过增加驱动力,以较长距离的长行程驱动透镜模块或图像传感器。
本发明的其它目的和优点可以从下面的详细描述中理解,并且将从本发明的示例性实施方式中变得更加清楚。而且,将容易理解,本发明的目的和优点可通过所附权利要求及其组合中所示的手段来实现。
解决问题的技术手段
为了达到上述目的,本发明提供一种用于照相机的致动器,包括:OIS承载架,安装有透镜模块或图像传感器,在垂直于光轴方向的第一方向以及垂直于所述第一方向的第二方向中的至少一个方向上移动所述透镜模块或所述图像传感器;AF承载架,容纳所述OIS承载架,并在所述光轴方向上移动所述OIS承载架;以及壳体,容纳所述AF承载架,其中,所述AF承载架具有开口部分,使得所述OIS承载架面向于所述壳体,所述OIS承载架包括辅助止动件,所述辅助止动件突出以能够通过所述开口部分与所述壳体接触。
其中,由于外部冲击,所述OIS承载架在所述第一方向和所述第二方向中的至少一个方向上移动时,所述辅助止动件与所述壳体接触,限制所述OIS承载架移动。
其中,第一间隙形成在所述AF承载架与所述壳体之间,用于移动所述AF承载架,第二间隙形成在所述OIS承载架与所述AF承载架之间,用于提供移动空间。
并且,第三间隙形成在所述辅助止动件与所述壳体之间,所述第三间隙大于所述第二间隙且小于所述第一间隙和所述第二间隙之和。
并且,在所述辅助止动件与所述壳体接触时,所述第一间隙和所述第二间隙之和由第四间隙保持。
并且,所述OIS承载架包括第一磁体和第二磁体,所述壳体包括第一驱动线圈和第二驱动线圈,所述第一驱动线圈对所述第一磁体产生电磁力,使所述OIS承载架在所述第一方向上移动,所述第二驱动线圈对所述第二磁体产生电磁力,使所述OIS承载架在所述第二方向上移动。
并且,所述辅助止动件分别设置在所述第一磁体和所述第二磁体的两侧,向所述壳体侧突出。
并且,所述第一磁体和所述第二磁体的厚度以对应于所述辅助止动件的长度的方式形成。
并且,在所述辅助止动件与所述壳体接触时,第五间隙形成在所述第一磁体与所述第一驱动线圈之间以及在所述第二磁体与所述第二驱动线圈之间中的至少一个,所述第五间隙小于第四间隙。
并且,第六间隙形成在所述第一磁体及所述第二磁体与所述第一驱动线圈及所述第二驱动线圈之间,所述第六间隙是第三间隙和第五间隙之和。
并且,本发明的用于照相机的致动器,还包括中间引导件,所述中间引导件引导所述OIS承载架在所述第一方向或所述第二方向上移动。
发明效果
根据本发明,通过在OIS承载架的一侧设置辅助止动件来防止构成元件之间发生碰撞,即使减小原有的减震器的体积,也能够提供与原有的减震器相同或更好的作用,因此,能够进一步保障驱动部(磁体与线圈)的空间,在不添加致动器的空间的情况下,能够在有限的空间内提高驱动力。
并且,根据本发明,能够使磁体与线圈之间的间隙最小化,同时能够增加磁体的厚度,因此,即使根据OIS承载架的移动,在使OIS承载架与AF承载架最远的区间,也能够对OIS承载架提供足够的驱动力。
并且,根据本发明,可以通过增加驱动力以较长距离的长行程驱动透镜模块或图像传感器,并且,不仅可以有效地应用于尺寸和重量大的图像传感器与透镜模块,也可以获得产品可靠性。
可以通过本发明获得的效果不限于上述效果,并且本发明所属领域的普通技术人员可以从以下描述中明显地理解在本文中未描述的其它技术效果。
附图说明
图1是根据本发明的实施例的用于照相机的致动器(以下称为“致动器”)的透视图。
图2和图3是示出了根据本发明的实施例的致动器的构成的分解图。
图4是用于说明根据本发明的实施例的致动器的X轴方向OIS的功能的图。
图5是用于说明根据本发明的实施例的致动器的Y轴方向OIS的功能的图。
图6是用于说明根据本发明的实施例的致动器的光轴方向AF的功能的图。
图7是现有的用于照相机的致动器的内部平面图。
图8是放大图7的A部分的局部放大图。
图9是根据本发明的实施例的致动器的内部平面图。
图10是放大图9的A部分的局部放大图。
附图标记
100:用于照相机的致动器
140:OIS承载架
143:辅助止动件
130:中间引导件
150:壳体
160:AF承载架
170:外罩
具体实施方式
以下将参考附图详细描述本发明的优选实施例。在描述之前,应该理解的是,该说明书和所附权利要求书中使用的术语不应被解释为限于一般含义或词典含义,而应基于允许发明人为最佳解释适当定义术语的原则基于与本发明的技术方面相对应的含义和概念来解释。
因此,在本文中所描述的实施例和附图仅是出于说明目的的优选实施例,而无意于限制本发明的范围,因此应当理解的是,在不脱离本发明的范围的情况下可以对其做出其它等同替换和修改。
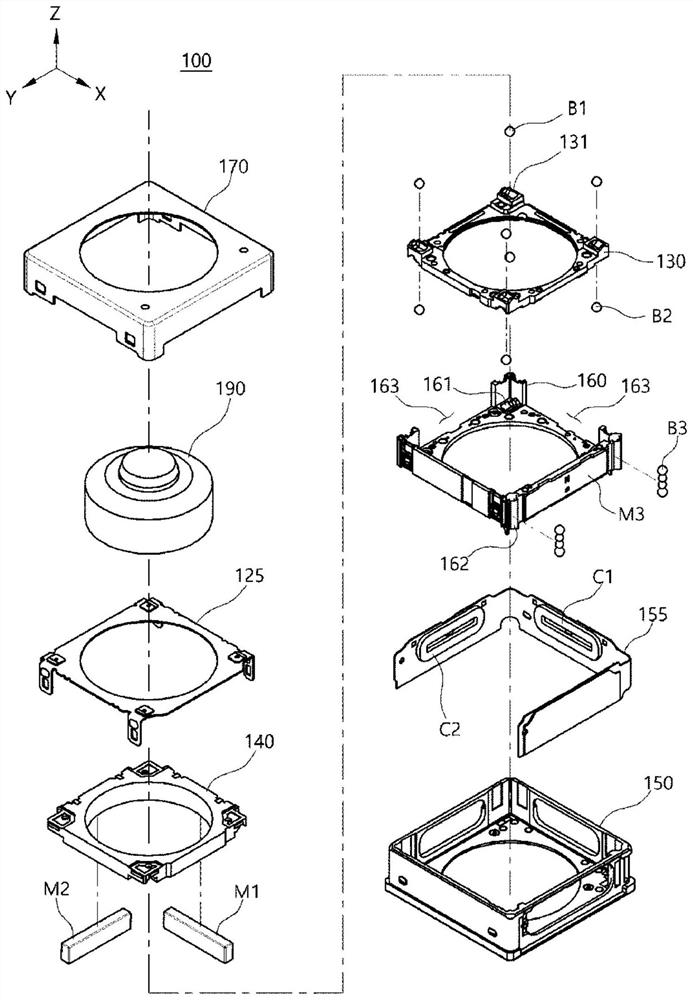
图1是根据本发明的实施例的用于照相机的致动器(以下称为“致动器”)的透视图,图2和图3是示出了根据本发明的实施例的致动器的构成的分解图。
在下文中,将首先参照图1至图3描述根据本发明的实施例的致动器的整体构成,并且,稍后将详细描述用于实现每个AF功能和OIS功能的本发明的实施例。
根据本发明的实施例的致动器100,是通过透镜模块190或图像传感器(未示出)的驱动,一起实现自动聚焦(AF,Auto Focus)功能和光学图像稳定(OIS,Optical ImageStabilization)功能的实施例,但是,根据实施方式,本发明的致动器100也可以实现仅用于OIS功能的致动器。
图1至图3所示的Z轴方向是光进入透镜模块190所沿的光轴方向,并且,对应于后述的AF承载架160前后移动所沿的方向。并且,光轴是指当透镜模块190被驱动时的透镜模块190的中心轴,并且,是指当图像传感器(未示出)被驱动时的图像传感器的中心轴。
并且,垂直于光轴方向(Z轴方向)的X轴方向和Y轴方向这两个方向是指透镜模块190或图像传感器通过OIS的驱动进行移动以补偿由手抖动引起的抖动所沿的方向。在下文的描述中,将X轴方向称为第一方向并将Y轴方向称为第二方向,然而,从相对角度来看,这仅是一个示例,并且X轴方向和Y轴方向中的任一个可以是第一方向,而另一个方向可以是第二方向。
根据本发明的实施例的致动器100可以通过透镜模块190或图像传感器的驱动来实现OIS功能和AF功能,但是,在下文中,作为一个实施例,将描述通过透镜模块190的驱动来实现OIS功能和AF功能的方法。
根据本发明实施例的致动器100可以包括OIS承载架140、中间引导件130、壳体150、AF承载架160、外罩170和透镜模块190。
根据本发明的实施例的致动器100可以具有按照如下依次结合的结构:壳体150、AF承载架160、中间引导件130、OIS承载架140、透镜模块190和外罩170。并且,在这些构成元件的中央可以形成用于安装透镜模块190的开口。在图中未示出,图像传感器可以设置在壳体150的下方。
透镜模块190安装在OIS承载架140中,中间引导件130构成在OIS承载架140的下方。并且,OIS承载架140和中间引导件130容纳在AF承载架160中。并且,在容纳OIS承载架140及中间引导件130的状态下,AF承载架160容纳在壳体150中。
在AF承载架160的内部中,OIS承载架140可以在第一方向和第二方向中的至少一个方向上移动。
OIS承载架140包括第一磁体Ml和第二磁体M2,AF承载架160包括第三磁体M3。并且,壳体150包括分别面向于第一磁体Ml、第二磁体M2和第三磁体M3的第一驱动线圈C1、第二驱动线圈C2和第三驱动线圈C3。
其中,在嵌入于基板155的状态下,第一驱动线圈C1、第二驱动线圈C2和第三驱动线圈C3可以设置在壳体150的内周表面中。
AF承载架160具有开口部分163,使得OIS承载架140面向于壳体150。即,AF承载架160具有开口部分163,以使设置在OIS承载架140中的第一磁体Ml面向于设置在壳体中的第一驱动线圈Cl,并且,以使设置在OIS承载架140中的第二磁体M2面向于设置在壳体中的第二驱动线圈C2。OIS承载架140在中央形成开口,所述开口用于安装透镜模块190,同时使得图像传感器(未示出)暴露在光轴方向上。由此,图像传感器可以感测到从透镜模块190进入的光。
其中,图像传感器可以由摄像器件,诸如电荷耦合器件(CCD:Charged-coupledDevice)或互补性氧化金属半导体(CMOS:Complementary Metal-oxide Semiconductor)形成。
如果AF承载架160在光轴方向上前后移动,则透镜模块190也在光轴方向上前后移动,通过调节透镜模块190与图像传感器之间的焦距,实现AF功能。在下文中对此进行详细的描述。
在中间引导件130的上部形成沿第一方向的第一导轨131,在OIS承载架140的下部形成面向于第一导轨131的第二导轨141。并且,第一OIS滚珠B1设置在第一导轨131和第二导轨141之间。
在中间引导件130的下部形成沿第二方向的第三导轨132,在AF承载架160的上部形成面向于第三导轨132的第四导轨161。并且,第二OIS滚珠B2设置在第三导轨132和第四导轨161之间。
在AF承载架160的外侧形成沿光轴方向的第五导轨162,在壳体150的内侧形成面向于第五导轨162的第六导轨(未示出)。并且,AF滚珠B3设置在第五导轨162和第六导轨(未示出)之间。
止动件125执行用于限制AF承载架160在光轴方向上的向上移动的作用。
外罩170可以设置以覆盖壳体150。其中,图像传感器可以固定在壳体150的下部。如此,根据本发明的实施例的致动器100可以在图像传感器被固定的状态下,通过将透镜模块190在三轴方向上移动,均实现OIS功能和AF功能。
当然,根据本发明的实施例的致动器100也可以将图像传感器替代透镜模块190安装在OIS承载架140和AF承载架160中,并且,在透镜模块190被固定的状态下,通过将图像传感器在三轴方向上移动,均实现OIS功能和AF功能。
图4是用于说明根据本发明的实施例的致动器的X轴方向OIS的功能的图,图5是用于说明根据本发明的实施例的致动器的Y轴方向OIS的功能的图。
参照图4,根据本发明的实施例的致动器100包括第一导轨131,沿第一方向(X轴方向)形成在中间引导件130的上部;第二导轨141,面向于第一导轨131形成在OIS承载架140的下部;以及第一OIS滚珠B1,设置在第一导轨131与第二导轨141之间。
第一OIS滚珠B1可以通过在第一导轨131与第二导轨141之间滚动运动,使OIS承载架140在第一方向上移动。
第一导轨131可以形成在第一中间引导件130的每个拐角处,并且,第二导轨141也可以形成在OIS承载架140的每个拐角处,但并不限于此。
第一磁体M1设置在OIS承载架140的一侧,并沿第一方向配置在两个第一OIS滚珠B1之间。
第一驱动线圈Cl面向于第一磁体Ml配置在壳体150的内侧面。其中,霍尔传感器可以设置在第一驱动线圈Cl的内侧。
在实现第一方向(X轴方向)的OIS功能的情况下,OIS承载架140在AF承载架160的内部空间中相对于壳体150在第一方向上移动。
霍尔传感器向操作驱动器(未示出)发送对应于由手抖动引起的运动方向及其大小的电信号,并且,所述操作驱动器可以控制对应于该大小和方向的电源施加到第一驱动线圈C1。即,OIS承载架140可以通过霍尔传感器与操作驱动器之间的反馈控制进行移动。
当电源施加到第一驱动线圈C1时,第一驱动线圈C1对设置于OIS承载架140中的第一磁体M1产生电磁力,由该电磁力,第一OIS滚珠B1在第一导轨131和第二导轨141之间滚动运动,由此,使OIS承载架140在第一方向上移动。
其中,由于透镜模块190是与OIS承载架140进行结合,因此,当OIS承载架140在第一方向上移动时,透镜模块190也在第一方向上移动。由此,将在第一方向上的手抖动进行补偿。
参照图5,根据本发明的实施例的致动器100包括第三导轨132,沿第二方向(Y轴方向)形成在中间引导件130的下部;第四导轨161,面向于第三导轨132形成在AF承载架160的上部;以及第二OIS滚珠B2,设置在第三导轨132与第四导轨161之间。
第二OIS滚珠B2可以通过在第三导轨132与第四导轨161之间滚动运动,使OIS承载架140在第二方向上移动。
第三导轨132可以形成在第一中间引导件130的每个拐角处,并且,第四导轨161也可以形成在AF承载架160的每个拐角处,但并不限于此。
第二磁体M2设置在与第二磁体M1相邻的OIS承载架140的一侧,并沿第二方向配置在两个第二OIS滚珠B2之间。
第二驱动线圈C2面向于第二磁体M2配置在壳体150的内侧面,霍尔传感器可以设置在第二驱动线圈C2的内侧。
在实现第二方向(Y轴方向)的OIS功能的情况下,OIS承载架140在AF承载架160的内部空间中相对于壳体150在第二方向上移动。
霍尔传感器向操作驱动器(未示出)发送对应于由手抖动引起的运动方向及其大小的电信号,并且,所述操作驱动器可以控制对应于该大小和方向的电源施加到第二驱动线圈C2。即,OIS承载架140可以通过霍尔传感器与操作驱动器之间的反馈控制进行移动。
当电源施加到第二驱动线圈C2时,第二驱动线圈C2对设置于OIS承载架140中的第二磁体M2产生电磁力,由该电磁力,第二OIS滚珠B2在第三导轨132和第四导轨161之间滚动运动,由此,使OIS承载架140在第二方向上移动。
其中,由于透镜模块190是与OIS承载架140进行结合,因此,当OIS承载架140在第二方向上移动时,透镜模块190也在第二方向上移动。由此,将在第二方向上的手抖动进行补偿。
图6是用于说明根据本发明的实施例的致动器的光轴方向AF的功能的图。
参照图6,根据本发明的实施例的致动器100包括第五导轨162,沿光轴方向(Z轴方向)形成在AF承载架160的外侧;第六导轨(未示出),面向于第五导轨162形成在壳体150的内侧;以及AF滚珠B3设置在第五导轨162与第六导轨(未示出)之间。
AF滚珠B3可以通过在第五导轨162与第六导轨(未示出)之间滚动运动,使AF承载架160在光轴方向上移动。
第五导轨162可以分别形成在具有第三磁铁M3的AF承载架160的外侧面的两侧。
第三磁体M3设置在第五导轨162之间,第三驱动线圈C3面向于第三磁体M3配置在壳体150的内侧面,霍尔传感器可以设置在第三驱动线圈C3的内侧。
AF承载架160可以通过霍尔传感器与操作驱动器之间的反馈控制进行移动。
壳体150设有AF承载架160的移动空间。并且,AF承载架160设置在外壳150内部,相对于外壳150在光轴方向(Z轴方向)上移动。
当适当的大小和方向的电源施加到第三驱动线圈C3时,第三驱动线圈C3对设置于AF承载架160中的第三磁体M3产生电磁力,由该电磁力,AF滚珠B3在第五导轨162和第六导轨(未示出)之间滚动运动,由此,使AF承载架160在光轴方向上移动。
OIS承载架140容纳在AF承载架160中,并且,由于透镜模块190是与OIS承载架140进行结合,因此,当AF承载架160在光轴方向上移动时,OIS承载架140与透镜模块190也在光轴方向上移动,以调节透镜模块190与图像传感器之间的焦距。
上述的OIS承载架140的在第一方向与第二方向上的移动以及AF承载架160的在光轴方向上的移动,可以通过每个单独的处理和物理结构来独立驱动,因此,在每个方向上的移动不仅可以分别进行,而且,也可以同时执行在多个相互组合的方向(XY、XZ、YZ、XYZ等)上移动。
图7是现有的用于照相机的致动器的内部平面图,图8是放大图7的A部分的局部放大图。
其中,图8(a)是没有产生因落下等的原因对安装有致动器的产品引起外部冲击的状态图,图8(b)是产生了外部冲击的状态图。
参照图7与图8,现有的用于照相机的致动器包括OIS承载架30,安装有透镜模块90;AF承载架60,容纳OIS承载架30;壳体50,容纳AF承载架60。
其中,OIS承载架30在第一方向与第二方向上移动透镜模块90,AF承载架60在光轴方向上移动OIS承载架30。
OIS承载架30包括第一磁体Ml和第二磁体M2,壳体50包括面向于第一磁体Ml和第二磁体M2的第一驱动线圈C1和第二驱动线圈C2。
其中,在AF承载架60中可以设置第一减震器D1与第二减震器D2,以减小在AF承载架60与壳体50之间接触时发生的冲击。
参照图8(a),第一间隙G1形成在AF承载架60与壳体50之间,用于移动AF承载架60,第二间隙G2形成在OIS承载架30与AF承载架60之间,用于提供移动空间。例如,第一间隙G1可以为0.1mm,第二间隙G2可以为0.22mm。
其中,参照图8(b),由于外部冲击,即使第一间隙G1与第二间隙G2全被破损,第一磁体Ml及第二磁体M2与第一驱动线圈C1及第二驱动线圈C2之间要保持大于等于第四间隙G4作为安全距离,以免防止因第一磁体Ml及第二磁体M2与第一驱动线圈C1及第二驱动线圈C2之间的碰撞导致损坏并维护可靠性。例如,第四间隙G4可以为0.09mm。
综上所述,如图8(a)所示,在没有外部冲击的情况下,第三间隙G3形成在第一磁体Ml及第二磁体M2与第一驱动线圈C1及第二驱动线圈C2之间,所述第三间隙G3是第一间隙G1、第二间隙G2和第四间隙G4之和。例如,第三间隙G3可以为0.41mm。
另一方面,在没有外部冲击的状态下,由于AF承载架60在光轴方向上移动,在AF承载架60与壳体50之间的第一间隙G1保持恒定。但是,由于OIS承载架30在垂直于光轴的第一方向和第二方向方向上移动,而根据OIS承载架30的移动,在OIS承载架30和AF承载架60之间的第二间隙G2发生变化,由此,施加到第一磁体Ml和第二磁体M2的电磁力也有变化。
如上所述,由于第一磁体Ml及第二磁体M2与第一驱动线圈C1及第二驱动线圈C2之间形成相对较大的第三间隙G3(例如,0.41mm),根据OIS承载架30的移动,在使OIS承载架与AF承载架最远的区间,对OIS承载架30提供驱动力有其局限性。
尤其,在图像传感器与透镜模块的尺寸变大、重量增加,并且,需要图像传感器与透镜模块的长行程驱动的情况下,上述的问题导致了产品难以实现,降低了产品的可靠性。
图9是根据本发明的实施例的致动器的内部平面图,图10是放大图9的A部分的局部放大图。
其中,图10(a)是没有产生因落下等的原因对安装有致动器100的产品引起外部冲击的状态图,图10(b)是产生了外部冲击的状态图。
参照图9与图10,如上所述,根据本发明的实施例的致动器100包括OIS承载架140,安装有透镜模块190;AF承载架160,容纳OIS承载架140;壳体150,容纳AF承载架160。
其中,OIS承载架140在第一方向与第二方向上移动透镜模块190,AF承载架160在光轴方向上移动OIS承载架140。
OIS承载架140包括第一磁体Ml和第二磁体M2,壳体150包括面向于第一磁体Ml和第二磁体M2的第一驱动线圈C1和第二驱动线圈C2。
其中,在AF承载架160中可以设置第一减震器D1与第二减震器D2,以减小在AF承载架160与壳体150之间接触时的冲击。
参照图10(a),第一间隙G1形成在AF承载架160与壳体150之间,用于移动AF承载架160,第二间隙G2形成在OIS承载架140与AF承载架160之间,用于提供移动空间。例如,第一间隙G1可以为0.1mm,第二间隙G2可以为0.22mm。
根据本发明的实施例的致动器100的OIS承载架140可以包括辅助止动件143,所述辅助止动件143突出以能够通过设置于AF承载架160的开口部分163与壳体150接触。如此,由于外部冲击,OIS承载架140在第一方向和第二方向中的至少一个方向上移动时,所述辅助止动件143与壳体150的内侧面接触,限制OIS承载架140移动。
参照图10(a),在没有外部冲击的情况下,第三间隙G3形成在辅助止动件143与壳体150之间。例如,第三间隙G3可以为0.24mm。
其中,第三间隙G3形成大于第二间隙G2,以便不干扰OIS承载架140的OIS驱动。
并且,第三间隙G3形成小于第一间隙和第二间隙之和G1+G2,以防止由于外部冲击OIS承载架140与AF承载架160之间发生碰撞。
由此,参照图10(b),由于外部冲击,在辅助止动件143与壳体150接触时,第一间隙G1与第二间隙G2不全破损,第一间隙G1和第二间隙G2之和保持第四间隙G4。例如,AF承载架160与壳体150接触,并且,在OIS承载架140与AF承载架160之间保持第四间隙G4。
并且,在辅助止动件143与壳体150接触时,第一磁体Ml与第一驱动线圈C1之间以及第二磁体M2与第二驱动线圈C2之间中的至少一个保持第五间隙G5作为安全距离。例如,第五间隙G5可以为0.09mm。
由此,即使发生外部冲击,也能够防止因第一磁体Ml及第二磁体M2与第一驱动线圈C1及第二驱动线圈C2之间的接触发生第一驱动线圈C1及第二驱动线圈C2损坏并维护可靠性。
其中,在没有外部冲击的情况下,第六间隙G6形成在第一磁体Ml及第二磁体M2与第一驱动线圈C1及第二驱动线圈C2之间,所述第六间隙G6是第三间隙G3和第五间隙G5之和。例如,第六间隙G6可以为0.33mm。
如上所述,根据本发明的实施例的致动器100在第一磁体Ml及第二磁体M2与第一驱动线圈C1及第二驱动线圈C2之间形成小于现有的致动器的第三间隙G3。
辅助止动件143分别设置在第一磁体Ml和第二磁体M2的两侧,向壳体150侧突出。由此,第一磁体Ml和第二磁体M2的厚度可以以对应于辅助止动件143的长度的方式形成。
由此可见,根据本发明的实施例的致动器100能够使第一磁体Ml及第二磁体M2与第一驱动线圈C1及第二驱动线圈C2之间的间隙最小化,同时能够增加第一磁体Ml和第二磁体M2的厚度,因此,即使根据OIS承载架140的移动,在使OIS承载架与AF承载架最远的区间,也能够对OIS承载架140提供足够的驱动力。
并且,根据本发明的实施例的致动器100可以通过增加驱动力以较长距离的长行程(stroke)驱动透镜模块190或图像传感器,并且,不仅可以有效地应用于尺寸和重量大的图像传感器与透镜模块,也可以获得产品可靠性。
综上所述,根据本发明的实施例的致动器100具有如下优点:通过在OIS承载架140的一侧设置辅助止动件143来防止构成元件之间发生碰撞,即使减小原有的第一减震器D1与第二减震器D2的体积,也能够提供与原有的第一减震器D1与第二减震器D2相同或更好的作用,因此,能够进一步保障驱动部(第一磁体Ml及第二磁体M2与第一驱动线圈C1及第二驱动线圈C2)的空间,在不添加致动器100的空间的情况下,能够在有限的空间内提高驱动力。
以上本发明采用限定的实施例和附图进行了说明,但本发明并不限于此,应当理解,本发明范围内的各种变化和修改对于本领域技术人员来说将从该详细描述中变得显而易见。
在本发明的上述描述中,诸如“第一”、“第二”的术语仅是用于根据彼此相对地标识部件的概念性术语,因此不应该将它们解释为用于表示特定次序、优先级等的术语。
为了强调或者突出本发明的技术内容,可以以稍微夸张的形式示出用于例示本发明及其实施方式的附图,但是应该理解,在不脱离本发明的范围的情况下,本领域技术人员可以考虑到以上描述和附图例示做出各种修改。
- 用于飞行器的控制表面的致动器组件、包含该致动器组件的飞行器及使用它们的方法
- 用于变速器换档器的致动器总成
- 用于变速器换档器的致动器总成
- 用于变速器换档器的致动器总成
- 用于变速器换档器的致动器总成
- 照相机致动器和包括该照相机致动器的照相机模块
- 用于照相机的致动器和照相机模块