基于2D激光雷达的挖掘机作业面重建系统及方法
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及一种挖掘机自主作业技术,更具体地说,涉及一种基于2D激光雷达的挖掘机作业面重建系统及方法。
背景技术
挖掘机是一种应用广泛的工程机械。为了提高挖掘机的作业效率和作业精度,减小对人工操作经验的依赖,将挖掘机用于不适合人类进入的作业区域,实际需求促使挖掘机向着智能化、自主化和机器人化的方向发展。
挖掘机自主作业依赖于对作业工况的感知,作业面的三维轮廓表面重建,可用于后续作业任务的规划与分解、挖掘轨迹规划与控制等。目前,作业面三维重建技术方案主要包括基于激光雷达的技术方案和基于大立体相机的技术方案。其中,激光雷达分为低线数(线数≤16)和高线数雷达,均基于ToF原理对空间点进行大密度测距,低线数雷达通常用于避障,但由于价格相对较低,在挖掘作业面重建中常通过增加俯仰云台等来实现水平方向270°~360°及垂直方向上较大范围的扫描,测距距离可达到100m以上。立体相机方案通常采用双目光学相机,基于视差测距原理实现一定视场范围的测距及重建,测距距离一般在20m以内。在挖掘机回转过程中,这两种作业面重建方式的数据融合计算量都比较大。
挖掘机土石方自主挖掘作业中,大范围的作业面重建主要用于作业任务规划,挖掘过程中仅需实施小范围的作业面更新,因此现有系统和方法存在较大的数据冗余及计算量。本发明基于2D激光雷达,利用挖掘机回转重建作业面,可满足不同作业阶段的重建需求,数据量较小,易于实现作业信息的实时分析处理。
发明内容
本发明要解决的技术问题是针对现有挖掘机作业面重建存在较大的数据冗余及计算量的问题,而提供一种基于2D激光雷达的挖掘机作业面重建系统及方法,减少了点云数据冗余和重建计算量,数据量较小,易于实现作业信息的实时分析处理,具有较低的系统成本。
本发明为实现其目的的技术方案是这样的:提供一种基于2D激光雷达的挖掘机作业面重建系统,其特征在于包括:靶标板、2D激光雷达、回转角传感器、数据处理单元。
靶标板,能够阻挡并反射2D激光雷达发射的激光束,固定安装在挖掘机的上部车身;靶标板是为平面薄板,固定在上部车身的回转平台上,位于挖掘机回转平台与动臂铰接的铰点旁侧。靶标板平面与2D激光雷达扫描平面垂直且相交,且沿激光雷达扫描周向的边缘不与其他物体接触,也即靶标板的边缘不与其他物体接触。
2D激光雷达,安装在挖掘机动臂上,用于扫描靶标板和作业面采集获取原始点云数据;2D激光雷达安装在动臂侧面且靠近动臂与斗杆铰点位置,2D激光雷达的激光扫描平面10与挖掘机工作装置所在平面平行,激光雷达坐标系X轴与动臂与斗杆铰点和回转平台与动臂铰点的连线平行。
回转角传感器,用于采集挖掘机上部车身回转角度;回转角传感器为IMU传感器,固定在挖掘机上部车身的某一位置,回转角传感器用于测量挖掘机上部车身回转角度,实时获取上部车身与底盘的相对角度。
数据处理单元为工业计算机或嵌入式计算机,接收2D激光雷达输出的原始点云数据和回转角传感器输出的角度数据;利用原始点云数据对靶标板的点云匹配确定动臂姿态角,再依据动臂姿态角、原始点云数据和上部车身回转角计算得到作业面在预定坐标系下三维轮廓表面坐标数据。预定坐标系通常为以挖掘机回转中心轴线作为Y轴,底盘正前方为X轴,侧方为Z轴的挖掘机基坐标系。
本发明为实现其目的的技术方案是这样的:提供一种基于2D激光雷达的挖掘机作业面重建方法,其特征在于步骤如下:
S1:用安装在挖掘机动臂上的2D激光雷达对作业面和安装在挖掘机上部车身上的靶标板进行激光扫描并获取原始点云数据,通过回转角传感器采集获取挖掘机上部车身回转角度;
S2:数据处理单元利用原始点云数据对靶标板的点云匹配确定动臂姿态角;
S3:依据动臂姿态角、原始点云数据和上部车身回转角计算得到作业面在挖掘机基坐标系下三维轮廓表面坐标数据。
点云匹配的目的在于提取激光雷达坐标系下轮廓尺度不变、具有方向信息的点云成分,作为定位激光雷达坐标系原点的参考基准。由于靶标板安装在回转平台与动臂铰点附近,2D激光雷达安装在动臂与斗杆铰点附近,在动臂运动过程中,激光雷达坐标系原点到靶标板的距离在较小范围内变化,在2D激光雷达扫描得到的2D点云图中,靶标板点云始终位于某一固定半径区间内。因此,在激光雷达坐标系下,固定半径区间内且满足一定长度的点云线段即可认为是靶标板点云。
动臂姿态角计算包括以下点云图像处理步骤:
步骤S21,点云图像滤波,以激光雷达坐标系原点为中心,保留点原始点云图像中预定半径范围内的点云,删除其他位置上的点云数据,得到点云图像。
步骤S22,点云图像阈值化,采用固定阈值对步骤1处理后的点云图像进行阈值化处理,得到二值点云图像。
步骤S23,形态学闭运算,采用固定大小的圆形模板对步骤2处理后的二值点云图像进行闭运算,将距离较近的离散点云转化为连续点云,得到连续点云图像。
步骤S24,连通域分析,对步骤3的处理得到的连续点云图像进行连通域分析,得到标号图像,分析各标号对应的连通成分的面积,并按面积阈值筛选出靶标板点云。
步骤S25,姿态角计算,在激光雷达坐标系下对靶标板点云做直线拟合,计算拟合直线与激光雷达坐标系轴的夹角而得到动臂姿态角。
上述方法中,进行步骤S3时,依据动臂姿态角将激光雷达坐标系下原始点云数据传递为挖掘机基坐标系下的点云数据,并在挖掘机基坐标系下提取作业面2D轮廓数据,依据作业面2D轮廓数据和上部车身回转角计算获取作业面在挖掘机基坐标系下三维轮廓表面坐标数据。
其中,将激光雷达坐标系下原始点云数据传递为挖掘机基坐标系下的点云数据的过程如下:
步骤S311、建立坐标系,由于挖掘机的回转中心可能不在工作装置平面11内,2D激光雷达旋转中心与动臂与斗杆铰点不重合,因此以挖掘机回转中心、回转平台与动臂铰点、动臂与斗杆铰点、2D激光雷达旋转中心为原点建立坐标系,分别为挖掘机基坐标系(3D)、工作装置坐标系(2D)、动臂坐标系(2D)和激光雷达坐标系(3D)。
步骤S312、构造坐标系变换矩阵,根据激光雷达坐标系原点与动臂坐标系原点的相对位置,构造激光雷达坐标系到动臂坐标系的旋转矩阵和平移向量,当上述两坐标系平行时,仅得到平移向量;根据动臂姿态角及动臂与斗杆铰点到回转平台与动臂铰点的距离,构造动臂坐标系到工作装置坐标系的旋转矩阵与平移向量;根据回转平台与动臂铰点与挖掘机回转中心的相对位置及回转角度,构造工作装置坐标系到挖掘机基坐标系的旋转矩阵与平移向量。将上述各旋转矩阵和平移向量合成为齐次矩阵形式的坐标变换矩阵。
步骤S313、点云坐标变换,利用步骤S312得到的各齐次矩阵,通过矩阵乘法将激光雷达坐标系下的点云数据传递至挖掘机基坐标系。
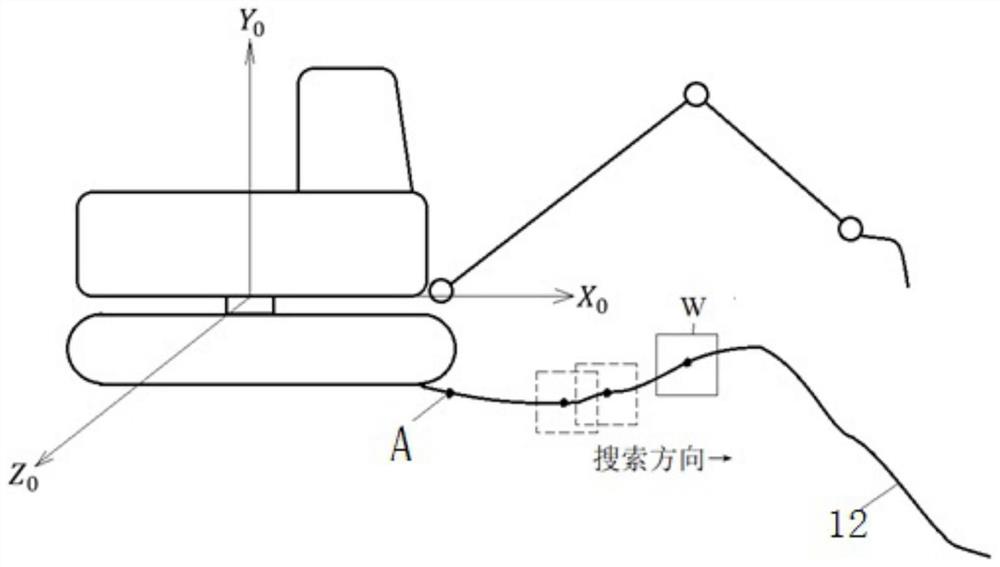
步骤S314、作业面点云提取。在步骤S313得到的点云集合中提取属于作业面部分的点云。首先根据位置信息,将位于挖掘机底盘下方的某个点云作为作业面轮廓搜索的起始点;再采用滑动窗口按一定间隔进行搜索,根据窗口内所有点云在垂直方向上的坐标平均值更新窗口在垂直方向上的位置,实现对连续点云轮廓的跟踪。
3D作业面生成按以下步骤实现:
步骤S321、挖掘机基坐标系行走平面离散网格化,按一定间隔将基坐标系下挖机行走平面划分为与坐标系轴平行的无重叠网格单元。上述间隔用于控制重建精度或分辨率,较小的间隔d对应了较大的平面重建分辨率。
步骤S322、作业面高度值计算,累加某一回转角度下点云集合在相应投影网格上的高度值,再以高度值累加结果的均值作为各投影网格单元坐标下的作业面高度值。
步骤S323,回转扫描重建,在回转过程中,按步骤S322可建立出一定范围内网格单元的作业面高度值,实现一定回转范围下的作业面重建。
本发明与现有技术相比具有的有益效果:针对挖掘机土石方挖掘作业特点,利用安装在动臂上的2D激光雷达,在挖掘机回转过程中对一定范围的作业面进行三维重建和更新,减少了点云数据冗余和重建计算量,数据量较小,易于实现作业信息的实时分析处理,具有较低的系统成本。由于激光雷达安装位置较高,也能够有效扫描自卸卡车车厢内物料装载情况。
附图说明
图1是本发明挖掘机作业面重建系统侧视图。
图2是本发明挖掘机作业面重建系统俯视图。
图3是本发明挖掘机作业面重建系统数据处理流程图。
图4是本发明挖掘机作业面重建方法流程图。
图5是本发明中动臂姿态角计算方法示意图。
图6是本发明中坐标系示意图。
图7是本发明中作业面点云提取方法示意图。
图8是本发明中网格化三维重建示意图。
图中零部件名称及序号:
2D激光雷达1、靶标板2、支架3、动臂4、动臂与斗杆铰点5、回转平台与动臂铰点6、回转角传感器7、上部车身8、底盘9、激光扫描平面10、工作装置平面11、滑动窗W、作业面2D轮廓12、起始点A。
具体实施方式
下面结合附图说明具体实施方案。
参照图1和图2、图3所示,本发明挖掘机作业面重建系统由2D激光雷达1、靶标板2、回转角传感器7和数据处理单元组成。2D激光雷达1用于采集周围环境的原始点云数据,回转角传感器7用于采集挖掘机上部车身相对于底盘9的回转角度
靶标板2是具有一定长度和宽度的平面薄板,可以是金属或塑胶等材质。靶标板2能够阻挡并反射2D激光雷达1发射的激光扫描平面10,起到定位参照物的作用,用于配合2D激光雷达1来计算挖掘机动臂姿态角θ。靶标板2固定安装在挖掘机回转平台与动臂的铰点6旁,通过支架3与挖掘机上部车身8固连。安装后,靶标板平面与2D激光雷达扫描平面相交,且靶标板2的边缘不与其他物体接触,保证2D激光雷达扫描得到的靶标板为独立的点云线段。上部车身8包括回转平台和安装在回转平台上姿态固定的部件。回转平台通过回转支撑安装在底盘上。
回转角传感器7为IMU传感器,固定在挖掘机上部车身的某一位置,回转角传感器7用于测量挖掘机上部车身相对于底盘9的回转角度
数据处理单元为工业计算机或嵌入式计算机,放置在挖掘机驾驶室内,数据处理单元接收2D激光雷达1输出的原始点云数据和回转角传感器7输出的角度数据
参照图3,本发明挖掘机作业面重建方法主要原始点云数据和上部车身回转角度获取、动臂姿态角计算、作业面重建生成等步骤。
原始点云数据和上部车身回转角度获取步骤中,用安装在挖掘机动臂4上的2D激光雷达对作业面和安装在挖掘机上部车身上的靶标板进行激光扫描并获取原始点云数据,通过回转角传感器采集获取挖掘机上部车身回转角度。
在动臂姿态角计算和作业面重建生成等步骤中每个步骤包含一些子步骤。
动臂姿态角计算步骤中主要通过对靶标板点云的匹配实现,按以下步骤实现:
步骤S21,点云图像滤波,以激光雷达坐标系X
步骤S22,点云图像阈值化,采用固定阈值T
步骤S23,形态学闭运算,采用固定大小例如3×3圆形模板对图像I
步骤S24,连通域分析,对连续点云图像I
步骤S25,姿态角计算,参照图5,在激光雷达坐标系下对靶标板点云做直线拟合,计算拟合直线与激光雷达坐标系轴的夹角α,进而得到动臂姿态角θ=90-α。
作业面重建生成步骤包括提取作业面2D轮廓数据和作业面三维轮廓表面坐标数据获取。
其中作业面2D轮廓12提取按以下步骤实现:
步骤S311,建立坐标系。参照图6,由于挖掘机的回转中心可能不在工作装置平面11内,激光雷达旋转中心与动臂与斗杆铰点不重合,因此以挖掘机回转中心O
步骤S312,构造坐标系变换矩阵。根据激光雷达坐标系原点O
当坐标系X
根据动臂姿态角θ及动臂坐标系原点O
根据工作装置坐标系原点O
步骤S313,点云坐标变换。利用步骤S312得到的齐次矩阵N
步骤S314,作业面点云提取。参照图7,在步骤S313得到的点云集合{x
如图8所示,3D作业面生成按以下步骤实现:
步骤S321,挖掘机基坐标系的行走平面X
步骤S322,作业面高度值计算。累加某一回转角度
步骤S323,回转扫描重建。在回转过程中,按步骤S322可建立出一定范围内网格单元的作业面高度值,实现一定回转范围下的作业面重建。