一种移动平台
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及交通运输技术领域,具体涉及一种移动平台。
背景技术
移动平台,例如轮椅、移动小车等,在农业、工业、影视、搜救、警用、军事等很多领域发挥很重要的作用,可以适应复杂的环境、路面情况。在移动平台作业中,为了适应复杂的环境与路面情况,需要车辆或者移动平台的转向灵活,控制方便。传统的车辆或者移动平台存在如下问题:
1)传统车辆的转向机构结构复杂,成本高,车辆自身重量大。在实际使用时,因车身重量较大,无论是直行或者转向都比较困难,浪费动力的同时不能达到实时控制。而且其转向控制过程复杂,不能单纯的通过两侧的轮速差实现转向。
2)传统的车辆大部分为单个平台,移动平台很难级联,在工业等领域应用时单个移动平台运送货物有限,需要车辆、平台在目的地与货物地之间来回运输,方能实现目的,工作效率低。因此急需一种利用车辆的左右轮差速实现转向,省掉复杂的转向机构,可以降低车辆自身成本和重量,同时车辆还具备扩展的能力。
发明内容
发明目的:针对现有技术中存在的问题,本发明提供一种移动平台,利用车辆的左右轮差速实现转向,省掉复杂的转向机构,可以降低车辆自身成本和重量,同时车辆还具备扩展的能力。
技术方案:本发明提供了一种移动平台,包括底盘、驱动桥,所述底盘个数为N个,所述驱动桥个数为N+1,N为大于等于1的正整数;所述驱动桥包括驱动桥支架以及转动连接于所述驱动桥支架的车轮,所述底盘两侧分别设置底盘铰链连接件,N个所述底盘与N+1个所述驱动桥依次间隔设置,且所述驱动桥支架与所述底盘铰链连接件通过共轴铰链或双轴铰链铰接;所述驱动桥支架两端转动连接有车轮,所述车轮相对所述驱动桥支架角度不变,所述车轮上设有驱动其转动的车轮驱动机构。
进一步地,所述共轴铰链包括一对同轴线设置的铰链轴以及一对中心对称设置的铰链连接件;铰链连接件一、铰链连接件二一端分别固定于铰链轴一、铰链轴二,其另一端分别固定连接于所述底盘铰链连接件上,所述铰链连接件一、铰链连接件二内部中空,其两者穿插设置于所述驱动桥支架上侧面与下侧面;铰链连接件一104、铰链连接件二105分别通过一对推力轴承转动连接于驱动桥支架上,所述推力轴承分别设置于铰链连接件一与铰链连接件二之间、铰链连接件二与驱动桥支架之间以及铰链连接件一与驱动桥支架之间;所述铰链轴一、铰链轴二分别贯穿所述驱动桥支架上半部分、下半部分设置,其与所述驱动桥支架之间通过轴承转动连接。
进一步地,所述驱动桥支架内还设有一对转向刹车机构,所述转向刹车机构为盘式刹车或鼓式刹车或电磁刹车,一对所述转向刹车机构分别用于控制所述铰链轴一、铰链轴二旋转停止。
进一步地,所述共轴铰链包括铰链轴三以及中心对称设置的铰链连接件三、铰链连接件四,所述铰链轴三贯穿所述驱动桥支架,且固定于所述驱动桥支架上;所述铰链连接件三、铰链连接件四内部中空,其两者穿插设置于所述驱动桥支架上侧面与下侧面,所述铰链连接件三、铰链连接件四一端分别转动连接于铰链轴三上,其另一端固定连接于所述底盘铰链连接件上,所述铰链连接件三、铰链连接件四均通过一对推力轴承连接于所述驱动桥支架上,所述推力轴承分别设置于铰链连接件三与铰链连接件四之间、铰链连接件三与驱动桥支架之间以及铰链连接件四与驱动桥支架之间。
进一步地,所述铰链轴三上下两端分别设置转向刹车机构,所述转向刹车机构为盘式刹车或鼓式刹车或电磁刹车,一对所述转向刹车机构分别用于控制所述铰链连接件三、铰链连接件四的旋转停止。
进一步地,所述双轴铰链包括铰链轴四、铰链轴五、铰链连接件五、铰链连接件六;所述链轴四、铰链轴五不同轴设置,其分别贯穿设置在靠近两侧底盘的驱动桥支架上,所述链轴四、铰链轴五分别与铰链连接件五、铰链连接件六固定连接,所述铰链连接件五、铰链连接件六内部中空,其两者套设于所述驱动桥支架上侧面与下侧面;所述铰链连接件五、铰链连接件六分别通过推力轴承转动连接于所述驱动桥支架上,所述推力轴承设于所述铰链连接件五与驱动桥支架之间、所述铰链连接件六与驱动桥支架之间;所述驱动桥支架通过轴承分别与所述铰链轴四、铰链轴五转动连接。
进一步地,所述驱动桥支架内还设有一对转向刹车机构,所述转向刹车机构为盘式刹车或鼓式刹车或电磁刹车,一对所述转向刹车机构分别用于控制所述铰链轴四、铰链轴五旋转停止。
进一步地,该移动平台上还设有转角编码器,所述转角编码器使用中空角位移编码器,用于测量驱动桥的旋转角度。
进一步地,所述移动平台上还设有主控计算机,所述主控计算机与转角编码器、转向刹车机构、车轮驱动机构分别电连接。
进一步地,所述移动平台转弯半径记为R1,移动平台两车轮速度为V1、V2,两轮外侧距离铰链轴中心距离为r,底盘前后铰链轴间距为L,所述转弯半径可通过如下公式计算:R1=2r×V1/(V1-V2);以铰链轴中心为圆心的偏转角速度ω=(V1-V2)/ r 。
有益效果:
1、本发明利用车辆的左右轮差速实现转向,省掉了复杂的转向机构,可以降低车辆自身成本和重量。同时车辆还具备扩展的能力,通过设置底盘与驱动桥实现移动平台级联,底盘个数比驱动桥个数少1,这样N个底盘在N+1个驱动桥作用下级联成为一个完整的移动平台,驱动桥与底盘之间通过共轴铰链或者双轴铰链铰接,便于方向调整与控制。
2、本发明使用两种不同结构的共轴铰链实现驱动桥与底盘之间的铰接,一种是通过两根同轴设置的铰链轴转动,分别实现带动驱动桥支架上的两个铰链连接件转动;另一种是通过一根铰链轴实现带动驱动桥支架上的两个铰链连接件分别转动,两种不同的共轴铰链都可以实现驱动桥支架上的两个铰链连接件分别转动,这样省掉了复杂的转向机构,可以降低车辆自身成本和重量。
3、本发明使用双轴铰链实现驱动桥与底盘之间的铰接,双轴铰链的两根铰链轴平行设置,每根铰链轴仅控制一个铰链连接件转动,驱动桥上的两个铰链连接件分开控制,实现驱动桥角度旋转的同时,实现驱动桥两侧的底盘分开控制。
4、本发明在双轴铰链或者共轴铰链上增加转向刹车机构,通过转向刹车机构控制驱动桥转动的角度,当转动至需要角度后,通过转向刹车机构控制双轴铰链或者共轴铰链不再转动,实现驱动桥与底盘的角度固定,在倾斜路段或者障碍物较多路段,便于控制。
5、本发明在每个驱动桥上设置转角编码器,通过转角编码器可以实时检测驱动桥的转动角度,并且其与主控计算机连接,主控计算机根据转角编码器检测的角度控制车轮驱动机构驱动两侧车轮的转速实现角度调整,或者控制转向刹车机构实现角度固定。
6、本发明主控计算机在判断转弯半径和偏转角速度时可以简单的通过公式进行计算,不需要再通过一系列传感器进行检测,只需要知道驱动桥两侧的车轮速度以及两轮外侧距离铰链轴中心距离即可得到转弯半径,结构简单的同时节省了主控计算机的计算复杂度。
附图说明
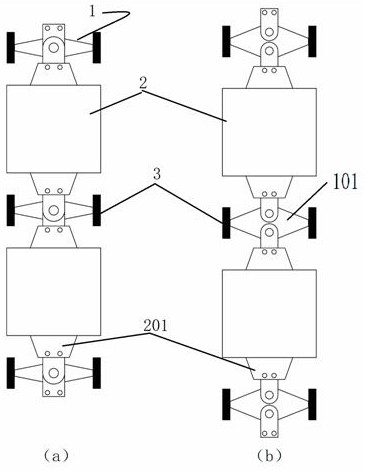
图1为本发明整体结构示意图,其中(a)为共轴铰链连接示意图;(b)为双轴铰链连接示意图;
图2为本发明实施方式1共轴铰链结构示意图;
图3为本发明实施方式2共轴铰链结构示意图;
图4为本发明实施方式3双轴铰链结构示意图;
图5为本发明实施方式1移动平台行走情况结构示意图;
图6为本发明实施方式1移动平台转弯情况下的结构示意图。
其中,1-驱动桥,101-驱动桥支架,102-铰链轴一,103铰链轴二,104-铰链连接件一,105-铰链连接件二,106-固定键,107-推力轴承,108-轴承,109-转向刹车盘,110-刹车卡钳,111-铰链轴三,112-铰链连接件三,113-铰链连接件四,114-铰链轴四,115-铰链轴五,116-铰链连接件五,117-铰链连接件六,118-转角编码器,2-底盘,201-底盘铰链连接件,3-车轮。
具体实施方式
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
实施方式1:
本发明公开了一种移动平台,包括底盘2、驱动桥1,底盘2个数为N个,驱动桥1个数为N+1,N为大于等于1的正整数。驱动桥1包括驱动桥支架101和转动连接于驱动桥支架101两端的车轮,底盘2两侧均设置底盘铰链连接件201,N个底盘2与N+1个驱动桥1依次间隔设置,驱动桥1可相对于底盘2转动,驱动桥支架101与底盘铰链连接件201通过共轴铰链铰接。车轮3相对驱动桥支架101角度不变,车轮3上设有驱动其转动的车轮驱动机构。
本实施方式中,取N=1,所以移动平台为一个四轮小车结构,本实施方式中,驱动桥支架101与底盘铰链连接件201通过共轴铰链铰接,本实施方式中的共轴铰链包括一对同轴线设置的铰链轴以及一对中心对称设置的铰链连接件。铰链轴记为铰链轴一102、铰链轴二103,铰链连接件分别计为铰链连接件一104、铰链连接件二105,铰链连接件一104、铰链连接件二105一端分别通过固定键106固定于铰链轴一102、铰链轴二103,参见附图2,铰链连接件一104通过一个固定键106固定在铰链轴一102上,铰链连接件二105通过另一个固定键106固定在铰链轴二103上。铰链连接件一104、铰链连接件二105一端另一端分别固定连接于底盘铰链连接件201上,铰链连接件一104、铰链连接件二105内部中空,其两者穿插设置于驱动桥支架101上侧面与下侧面。
铰链连接件一104、铰链连接件二105分别通过一对推力轴承107转动连接于驱动桥支架101上,参见附图2,推力轴承107共有4个,其中2个推力轴承107位于铰链连接件一104与铰链连接件二105之间,1个推力轴承107设置于铰链连接件二105与驱动桥支架101之间,另一个推力轴承107设置于铰链连接件一104与驱动桥支架101之间,参见附图2。铰链轴一102、铰链轴二103分别贯穿驱动桥支架101上半部分和下半部分设置,其与驱动桥支架101之间通过轴承108转动连接,参见附图2,轴承108设置有4个,分别设置在驱动桥支架101上半部分与下半部分,与铰链轴一102、铰链轴二103接触的两端。推力轴承107承受垂直方向的荷载,轴承108承受水平方向的荷载。
本实施方式中,驱动桥支架101内部中空,在驱动桥支架101内还设有一对转向刹车机构,转向刹车机构为盘式刹车或鼓式刹车或电磁刹车,一对转向刹车机构分别用于控制铰链轴一102、铰链轴二103旋转停止。参见附图2,本实施方式中使用的转向刹车机构为盘式刹车,包括固定于铰链轴一102、铰链轴二103的转向刹车盘109、设置于驱动桥支架101内的刹车卡钳110,转向刹车盘109与铰链轴一102、铰链轴二103同轴线设置,转向刹车盘109与刹车卡钳110卡合,而且刹车卡钳110上设置有驱动机构,驱动刹车卡钳110向转向刹车盘109移动或者远离转向刹车盘109方向移动。当需要固定转动角度时,通过刹车卡钳110收紧,会卡住转向刹车盘109,使其停止转动,铰链轴一102、铰链轴二103、铰链连接件一104、铰链连接件二105也随之停止转动,刹车卡钳110可以根据需要选择拉线、启动、液压等方式的成熟产品。
该移动平台上还设有转角编码器,转角编码器使用中空角位移编码器,用于测量驱动桥1的旋转角度。该转角编码器带有一个内部中空的转动件,用于测量角位移,可以套在铰链轴一102、铰链轴二103上随之一起转动,转角编码器的外壳固定在驱动桥支架101上不能转动,当铰链轴一102、铰链轴二103转动时,其转动件部分与铰链轴一102、铰链轴二103同步转动。
该移动平台上还设有主控计算机,主控计算机与转角编码器、转向刹车机构、车轮驱动机构分别电连接。转角编码器通过通讯接口实时发送电信号给主控计算机,主控计算机通过控制转向刹车机构、车轮驱动机构实现驱动桥1转动角度的控制。
参见附图5余附图6,移动平台转弯半径记为R1,移动平台两车轮速度为V1、V2,两轮外侧距离铰链轴中心距离为r,底盘前后铰链轴间距为L,转弯半径可通过如下公式计算:R1=2r×V1/(V1-V2);以铰链轴中心为圆心的偏转角速度ω=(V1-V2)/ r 。
当V1=V2时,则车辆保持直线行进;当V1与V2速度不一致时,则会产生以铰链中心为圆心的偏转角速度ω,角速度计算公式如下:ω=(V1-V2)/ r。
车辆需要直行时,保持所有车轮同步转动。
需要转向时,控制每个车轮的转速,产生左右差速,可以实现转向。举例:左转操作,使前驱动桥1右轮速度大于左轮,前驱动桥1向左偏转,底盘2可以随铰链一起向右;如果同时对后驱动桥1操作,使后驱动桥1向右偏转,则可以使车辆的转弯半径变得更小。车辆需要斜向行驶时,分别控制前后驱动桥1的左右轮差速,使得前后驱动桥1同步产生同方向的偏转,达到需要的角度后控制轮速使两轮速度一致,则车辆可以按设定方向行驶。
车辆行驶时,主控计算机可根据场景需要的转弯半径R1,实时调整两车轮速度和偏转角a,控制车辆的转弯。sina=L/2(R1-r)
实施方式2:
本实施方式与实施方式1的不同之处为:参见附图3,共轴铰链包括铰链轴三111以及中心对称设置的铰链连接件三112、铰链连接件四113,铰链轴三111贯穿驱动桥支架101,且通过固定键106固定于驱动桥支架101上;铰链连接件三112、铰链连接件四113内部中空,其两者穿插设置于驱动桥支架101上侧面与下侧面,铰链连接件三112、铰链连接件四113一端通过轴承108分别转动连接于铰链轴三111上,参见附图3,轴承108设置4个,分别设置于铰链连接件三112、铰链连接件四113上下侧壁上且与铰链轴三111转动连接。铰链连接件三112、铰链连接件四113另一端固定连接于底盘铰链连接件201上,铰链连接件三112、铰链连接件四113均通过一对推力轴承107连接于驱动桥支架101上,推力轴承107设置有4个,其中2个推力轴承107位于铰链连接件三112、铰链连接件四113之间,1个推力轴承107设置于铰链连接件三112与驱动桥支架101之间,另一个推力轴承107设置于铰链连接件四113与驱动桥支架101之间,参见附图3。推力轴承107承受垂直方向的荷载,轴承108承受水平方向的荷载。
铰链连接件三112、铰链连接件四113的结构参见附图3,其一侧面均为阶梯结构,在铰链轴三111贯上下两端分别设置转向刹车机构,转向刹车机构为盘式刹车或鼓式刹车或电磁刹车,一对转向刹车机构分别用于控制铰链连接件三、铰链连接件四的旋转停止。
本实施方式中,铰链轴三111为固定不动的,其与驱动桥支架101固定连接,所以在驱动桥1两侧的车轮车速不同时,铰链连接件三112、铰链连接件四113在推力轴承107与轴承108作用下出现转动,实现转向操作。
本实施方式中使用的转向刹车机构为盘式刹车,包括固定于铰链轴三111的转向刹车盘109、设置于驱动桥支架101内的刹车卡钳110,转向刹车盘109与铰链轴三111同轴线设置,转向刹车盘109与刹车卡钳110卡合,而且刹车卡钳110上设置有驱动机构,驱动刹车卡钳110向转向刹车盘109移动或者远离转向刹车盘109方向移动。当需要固定转动角度时,通过刹车卡钳110收紧,会卡住转向刹车盘109,使其停止转动,铰链连接件三112、铰链连接件四113也随之停止转动,刹车卡钳110可以根据需要选择拉线、启动、液压等方式的成熟产品。
本实施方式中其他结构与实施方式1相同,此处不做赘述。
实施方式3:
本实施方式与实施方式1和实施方式2的不同之处在于:驱动桥支架101与底盘铰链连接件201通过双轴铰链铰接,该双轴铰链包括铰链轴四114、铰链轴五115、铰链连接件五116、铰链连接件六117。链轴四114、铰链轴五115不同轴平行设置,其分别贯穿设置在靠近两侧底盘2的驱动桥支架101上,链轴四114、铰链轴五115分别通过固定键106与铰链连接件五116、铰链连接件六117固定连接,铰链连接件五116、铰链连接件六117内部中空,其两者套设于驱动桥支架101上侧面与下侧面;铰链连接件五116、铰链连接件六117分别通过推力轴承107转动连接于驱动桥支架101上,本实施方式中设置4个推力轴承107,参见附图4,2个推力轴承设于铰链连接件五116与驱动桥支架101之间,另外2个推力轴承107设于铰链连接件六117与驱动桥支架101之间。驱动桥支架101通过轴承108分别与铰链轴四114、铰链轴五115转动连接,轴承108设置4个,分别位于驱动桥支架101与链轴四114、铰链轴五115接触位置。
本实施方式中,链轴四114、铰链轴五115是可旋转的,所以在驱动桥1两侧的车轮车速不同时,链轴四114、铰链轴五115、铰链连接件五116、铰链连接件六117在推力轴承107与轴承108作用下出现转动,实现转向操作。
在驱动桥支架101内还设有一对转向刹车机构,转向刹车机构为盘式刹车或鼓式刹车或电磁刹车,一对转向刹车机构分别用于控制铰链轴四114、铰链轴五115旋转停止。
本实施方式中使用的转向刹车机构为盘式刹车,包括固定于链轴四114、铰链轴五115的转向刹车盘109、设置于驱动桥支架101内的刹车卡钳110,转向刹车盘109与链轴四114、铰链轴五115分别同轴线设置,转向刹车盘109与刹车卡钳110卡合,而且刹车卡钳110上设置有驱动机构,驱动刹车卡钳110向转向刹车盘109移动或者远离转向刹车盘109方向移动。当需要固定转动角度时,通过刹车卡钳110收紧,会卡住转向刹车盘109,使其停止转动,链轴四114、铰链轴五115也随之停止转动,刹车卡钳110可以根据需要选择拉线、启动、液压等方式的成熟产品。
本实施方式中其他结构与实施方式1相同,此处不做赘述。
上述实施方式只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所做的等效变换或修饰,都应涵盖在本发明的保护范围之内。