电子装置间的联接的自动检测装置
文献发布时间:2023-06-19 11:55:48
技术领域
本发明总体上涉及电子装置的联接(couplage)。本发明特别适用于机动车的领域。可以例如在电子计算机中实施本发明。
背景技术
如今,机动车辆包括越来越多的车载电子装置,例如联接到电子计算机的传感器。这些车载电子装置需要机动车辆中或多或少复杂的连接技术。
在内燃发动机的情况下,使用传感器并将其联接到至少一个电子计算机,如发动机控制计算机,以确保所述内燃发动机运转良好,从而使得能够更好地控制燃料消耗并因此控制污染物到大气中的排放。
为了制造这些传感器,在现有技术中已知使用被安置在可移动的带槽口的目标对面的电压源型传感器。所述传感器通常具有三个传感器引脚,以将以电压变化形式的检测信号传送给发动机控制计算机。
近年来,开发了新的传感器技术,即电流源型传感器。这些传感器以电流变化的形式传递信息。
根据所使用的传感器的类型,在发动机控制计算机处存在不同的专用硬件接口,其使得能够将所述传感器联接到所述发动机控制计算机。该接口尤其使得能够利用(电子计算机中的)合适的电子装置来生成和接收适于管理(在这种情况下管理内燃发动机)的电信号。
于是,在设计发动机控制计算机时,需要根据所连接的传感器的类型(即电压源型传感器或电流源型传感器)来更改其硬件接口。因此,一旦选择了所实现的传感器,就不能再例如在车辆的使用寿命期间改变传感器的类型,因为硬件接口不具有适应性。
发明内容
本发明提出了一种自动联接检测装置,其使得能够部分或全部地弥补所引用的现有技术的技术缺陷。
为此,本发明的第一方面提出了一种计算机,其包括第一计算机引脚、第二计算机引脚、第三计算机引脚、硬件接口,硬件接口包括分别联接到第一计算机引脚、第二计算机引脚和第三计算机引脚的第一硬件接口输入、第二硬件接口输入、第三硬件接口输入,其特征在于,硬件接口包括具有第一电阻的第一引脚和第一电阻的第二引脚的第一电阻、具有第二电阻的第一引脚和第二电阻的第二引脚的第二电阻、晶体管、比较器;第一电阻的第一引脚一方面联接到第一硬件接口引脚并且另一方面联接到晶体管的第一引脚;此外,第一电阻的第二引脚一方面联接到第二电阻的第一引脚并且另一方面联接到晶体管的第二引脚,晶体管包括第三引脚;第二电阻的第二引脚一方面联接到第二硬件接口引脚并且另一方面联接到比较器的第二输入;第二硬件接口引脚联接到第一硬件接口输出;比较器还包括第一输入;比较器的第一输出联接到第二硬件接口输出。
另一方面,本发明提出了联接到电子计算机的传感器的自动检测方法,包括以下步骤:
a. 第一步骤e1),切换晶体管,以便一方面使第一电阻短路,并且另一方面在第一计算机引脚与第二计算机引脚之间施加约为第二电阻的阻抗,
b. 第二步骤e2),读取由联接到计算机的所述传感器产生的信号,
c. 第三步骤e3),将联接到计算机的传感器产生的信号的值与参考值Vref1进行比较,在比较结果为正的情况下则转至第四步骤e4),并且在比较结果为负的情况下转至第六步骤e6),
d. 第四步骤e4),发信号通知在传感器的电池电压处存在短路型故障,
e. 第六步骤e6),将代表联接到计算机的传感器的信号的值与参考值Vref2进行比较,在比较结果为负的情况下则转至第八步骤e8),并且在比较结果为正的情况下转至第十四步骤e14),
f. 第八步骤e8),将代表联接到计算机的传感器的信号的值与参考值Vref3进行比较,在比较结果为负的情况下则转至第十一步骤e11),并且在比较结果为正的情况下转至第九步骤e9),
g. 第九步骤e9),发信号通知在传感器的电接地处存在短路型故障,
h. 第十一步骤e11),更改硬件接口以兼容电流源型传感器,
i. 第十四步骤e14),更改硬件接口以兼容电压源型传感器。
在一个实施例中,根据本发明的联接到电子计算机的传感器的自动检测方法在第十一步骤e11)中具有更改硬件接口,包括在第一计算机引脚和第二计算机引脚上施加约为第二电阻的阻抗的阻抗。
例如,在第十一步骤e11)中,处理源自电流源型的信号。
联接到电子计算机的传感器的自动检测方法可以例如在第十四步骤e14)中具有更改硬件接口,包括在第一计算机引脚和第二计算机引脚上施加约为第一电阻的阻抗的阻抗。
附图说明
现在将参考附图来描述本发明的一个优选实施例,其中:
图1示出了联接到电压源型传感器的现有技术的计算机的示意图。
图2示出了联接到电流源型传感器的现有技术的计算机的示意图。
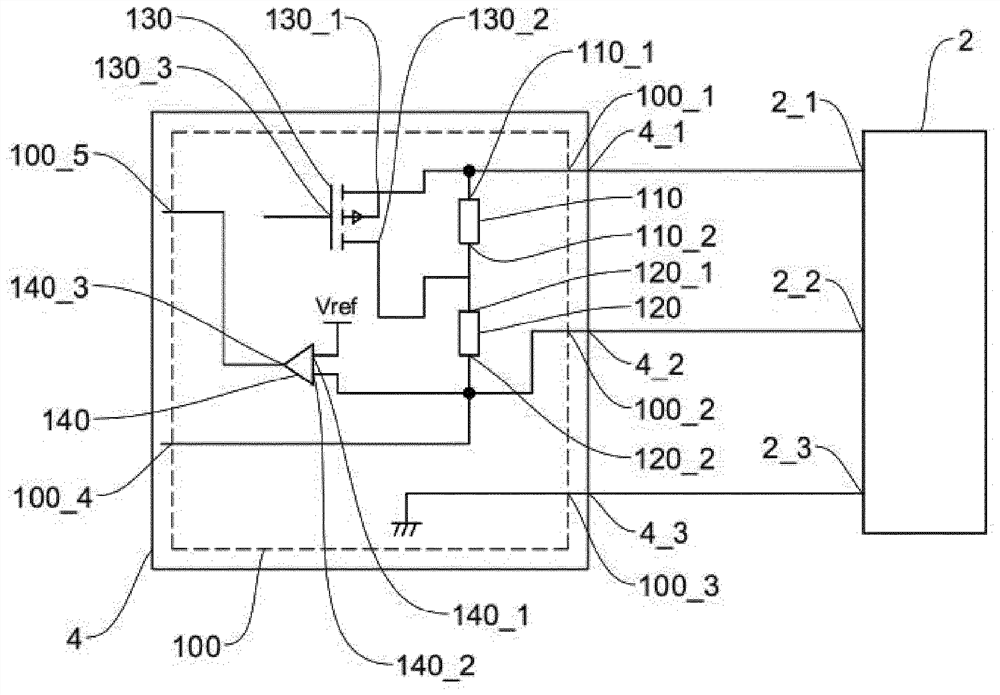
图3示出了包括根据本发明的硬件接口的计算机的示意图。
图4示出了根据本发明的方法的流程图。
具体实施方式
图1示出了例如联接到发动机控制计算机4的现有技术的电压源型传感器2。电压源型传感器2例如是这样的的传感器,其专用于检测内燃发动机的凸轮轴经过在所述电压源型传感器2前方的所述目标的齿的定位。这样的电压源型传感器2通常包括三个引脚:第一传感器引脚2_1联接到例如第一计算机引脚4_1并且被适配成向所述电压源型传感器2馈送电能;第二传感器引脚2_2联接到专用于接收代表凸轮轴位置的信号的第二计算机引脚4_2;并且最后,第三传感器引脚2_3联接到第三计算机引脚4_3,第三计算机引脚4_3通常联接到机动车辆的电接地。电压源型传感器2的内部结构为本领域技术人员所熟知,此处将不再详细介绍。
发动机控制计算机4具有硬件接口6,其包括例如传感器馈电模块8和信号处理模块10。
传感器馈电模块8被适配成向电压源型传感器2馈送电能。为此,传感器馈电模块8具有第一传感器馈电模块引脚8_1,其被适配成产生通过第一计算机引脚4_1向所述电压源型传感器2的所述电能馈送。例如,电能馈送的值为5V。传感器馈电模块8的内部结构为本领域技术人员所熟知,并且具有众多变型。
在一个实施例中,传感器馈电模块8包括:电能源,其可以是发动机控制计算机4的内部电源;以及电阻12,称为“拉起(pull-up)电阻”。所述拉起电阻12具有向电压源型传感器2加偏压(polariser)的作用。拉起电阻12包括第一电阻引脚12_1,其一方面联接到电能源,并且另一方面联接到第一传感器馈电模块引脚8_1。拉起电阻12还包括联接到电能馈送模块的第二引脚8_2的第二电阻引脚12_2。
信号处理模块10被适配成对源自电压源型传感器2的信号进行整形和/或滤波。为此,信号处理模块10包括第一信号处理模块引脚10_1、第二信号处理模块引脚10_2和第三信号处理模块引脚10_3。
例如,第一信号处理模块引脚10_1联接到第二计算机引脚4_2以及第三信号处理模块引脚10_3。第二信号处理模块引脚10_2联接到第三计算机引脚4_3,并且第三信号处理模块引脚10_3联接到第二电能馈送模块引脚8_2。第四信号处理模块引脚10_4被适配成产生滤波后的信号给发动机控制计算机4的至少一个其他功能。
此外,信号处理模块10的内部结构可以包括第一电容14,其具有第一电容的第一引脚14_1和第一电容的第二引脚14_2。第一电容的第二引脚14_2联接到电接地,并且第一电容的第一引脚14_1一方面联接到第一电阻引脚16_1,并且另一方面联接到第三信号处理模块引脚10_3。此外,第三引脚10_3联接到第一引脚10_1。信号处理模块10还具有电阻16,电阻16具有第二电阻引脚16_2。第二电阻引脚16_2联接到第四信号处理模块引脚10_4。各元件(如电阻和电容)的值为本领域技术人员所熟知,因此在此不给出。
图2示出了现有技术的电流源型传感器20的示例。该电流源型传感器20工作并联接到发动机控制计算机4。电流源型传感器20以电流变化的形式传递信息,需要发动机控制计算机4处的不同的硬件接口6,以便能够检测源自电流源型传感器20的接近的电流水平。
为此,可以使用本领域技术人员称为分流电阻的电阻30,其包括第一电阻引脚30_1和第二电阻引脚30_2。第一电阻引脚30_1联接到所述发动机控制计算机4的电源,第二电阻引脚30_2一方面联接到第二计算机引脚4_2,并且另一方面联接到第一转换装置引脚32_1。转换装置32被适配成比较和适配施加在第二电阻引脚30_2上的电压和施加在第二转换装置引脚32_2上的参考电压。
转换装置32还具有联接到参考电压的第二转换装置引脚32_2。参考电压的值例如可以是4.5V。此外,转换装置32具有联接到发动机控制计算机4的内部功能的第三转换装置引脚32_3。因此,第三转换装置引脚32_3被适配成产生以至少两个电压水平的形式的电信号,所述至少两个电压水平代表流过分流电阻30的电流。优选地,分流电阻30具有约为例如10欧姆的相对较小的值。
如在说明书前文中提到的,因此需要针对每种类型的传感器2、20在上游更改硬件接口6的内部结构。
如图3所示,本发明提出了新的硬件接口100,其使得能够联接电压源型传感器2或电流源型传感器20,而无需在上游更改硬件接口100的内部结构。
为此,巧妙地提出了硬件接口100,其被适配成将电压源型传感器2或电流源型传感器20无差别地联接到发动机控制计算机4,而无需更改所述发动机控制计算机4的硬件接口100。
在一个优选实施例中,硬件接口100包括第一硬件接口输入100_1、第二硬件接口输入100_2、第三硬件接口输入100_3,其分别联接到第一计算机引脚4_1、第二计算机引脚4_2和第三计算机引脚4_3。硬件接口100还包括第一硬件接口输出100_4和第二硬件接口输出100_5,其联接到发动机控制计算机4内部和/或外部的装置。
硬件接口100包括第一电阻110、第二电阻120、晶体管130和比较器140。第一电阻110包括第一电阻的第一引脚110_1和第一电阻的第二引脚110_2;第二电阻120包括第二电阻的第一引脚120_1和第二电阻的第二引脚120_2。第一电阻的第一引脚110_1一方面联接到第一硬件接口引脚100_1,并且另一方面联接到第一晶体管引脚130_1。第一电阻的第二引脚110_2一方面联接到第二电阻的第一引脚120_1,并且另一方面联接到第二晶体管引脚130_2。此外,晶体管130包括第三晶体管引脚130_3,其在MOS(金属氧化物半导体)型晶体管130的情况下对应于本领域技术人员已知的栅极。
第二电阻的第二引脚120_2一方面联接到第二硬件接口引脚100_2,并且另一方面联接到第二比较器输入140_2。此外,第二硬件接口引脚100_2联接到第一硬件接口输出100_4。
比较器140还包括联接到参考电压的第一输入140_1,在一个实施例中,参考电压可以具有4.5V的值。第一比较器输出140_3联接到第二硬件接口输出100_5。第三硬件接口输入100_3联接到机动车辆的接地。
于是,藉由根据本发明的硬件接口100,并且更确切地说藉由第一电阻110、第二电阻120和晶体管130的联接的组合,可以在第一硬件接口引脚100_1与第二硬件接口引脚100_2之间选择对应于第二电阻120的值的低阻抗值或对应于第一电阻110的值加上第二电阻120的值的高阻抗值。低阻抗值意指十欧姆量级的值,并且高阻抗值意指千欧姆量级的值。
如在说明书前文中提到的,是电压源型传感器2或电流源型传感器20联接到第一计算机引脚4_1、第二计算机引脚4_2和第三计算机引脚4_3。
本发明还提出了如图4所示的用于控制硬件接口100的方法,其使得能够自动检测联接到发动机控制计算机4的传感器2或20的类型。
根据本发明的方法具有第一步骤e1,包括将晶体管130切换为闭合状态以使得能够使第一电阻110短路。于是,在该第一步骤e1中,在第一计算机引脚4_1与第二计算机引脚4_2之间施加与第二电阻120的阻抗相等的阻抗。晶体管130由施加在所述晶体管的第三引脚130_3上的控制信号来控制。这样的控制信号为本领域技术人员所熟知,因此将不再介绍或解释。
在第二步骤e2中,读取出现在第一硬件接口输出100_4上的信号,该信号代表联接到发动机控制计算机4的传感器2的输入电压。第二步骤e2可以由发动机控制计算机4内部的模块来执行,该模块在此未示出,因为它无益于理解本发明的方法。一旦读取了第一硬件接口输出100_4上出现的信号,接下来就执行第三步骤e3。
在第三步骤e3中,将出现在第一硬件接口输出100_4上的信号的值与参考值Vref1进行比较。例如,参考值是Vref1=6V。在比较结果为正的情况下,则该方法规定转至第四步骤e4,并且在比较结果为负的情况下,转至第六步骤e6。在一个实施例中,第一输出100_4上出现的信号的值的比较由硬件接口100外部的模块来执行。
根据本发明的方法,在比较结果为正的情况下(第三步骤e3),这表明根据第四步骤e4,在联接到发动机控制计算机4的传感器2、20处存在电池短路。该故障可以例如在传感器2、20有故障时被检测到。本发明的方法在这种情况下在第五步骤e5中规定生成软件警报,其使得能够例如向发动机控制计算机4通知传感器2、20处的这样的故障。
根据本发明的方法,在第六步骤e6期间,进行第一输出100_4上出现的信号的值与参考值Vref2的另一比较。例如,参考值是Vref2=4.7V。在比较结果为负的情况下,则该方法规定转至第八步骤e8,并且在比较结果为正的情况下,转至第十四步骤e14。
根据本发明的方法,在第八步骤e8期间,将出现在第一输出100_4上的信号的值与参考值Vref3进行比较。例如,参考值为Vref3=1V。在比较结果为负的情况下,则该方法规定转至第十一步骤e11,并且在比较结果为正的情况下,转至第九步骤e9。
在比较结果为正的情况下(第八步骤e8),这表明,根据本发明的方法,在联接到发动机控制计算机4的传感器2、20处存在电接地短路。该故障可以例如在传感器2、20有故障时被检测到。本发明的方法于是在第十步骤e10中规定生成软件警报,其使得能够例如向发动机控制计算机4通知传感器2、20处的这样的故障。
在比较结果为负的情况下(第八步骤e8),这表明,根据本发明的方法及其第十一步骤e11,在发动机控制计算机4的端子处存在电流源型传感器20。
在第十二步骤e12中,执行硬件接口100的软件配置,使得联接到传感器20的发动机控制计算机4的端子处的阻抗具有对应于电流源型传感器20的联接的较低值。为此,在第十二步骤e12期间,控制晶体管130以使第一电阻110短路,使得仅第二电阻120的阻抗施加在第一引脚100_1与第二引脚100_2之间。于是,第一引脚100_1与第二引脚100_2之间的阻抗约为10欧姆。于是,藉由本发明的方法,当在硬件接口100的端子处检测到电流源型传感器20时,可以以软件方式更改硬件接口100。
然后,该方法规定转至第十三步骤e13,在此期间,例如,将对应于电流源型传感器20的检测和有效连接以及对应于由第二硬件接口输出100_5传递的信号测量值的信息发送到发动机控制计算机4的专门模块。
在第十四步骤e14中,根据本发明的方法,在发动机控制计算机4的端子处检测到电压源型传感器2的存在。关于这样的存在的信息例如通过专用信号发送到发动机控制计算机4的模块。
接下来,当转至第十五步骤e15时,控制晶体管130以使第一电阻110和第二电阻120串联。为此,本发明的方法规定控制晶体管130,以使其具有开路开关的行为。本领域技术人员将理解要施加到晶体管130的信号的形式和类型,因此在此将不再介绍。
接下来,在第十六步骤e16中,对硬件接口100进行软件配置以使其能够读取由电压源型传感器2传递的信号。
在第十七步骤e17中,测试发动机是否运行。为此,分析出现在第二硬件接口输出100_5上的信号。在例如在所述信号上出现矩形波的情况下,则这表明内燃发动机运行,并且该方法规定于是转至第十八步骤e18。当然,相反地,如果不存在任何矩形波,则根据本发明的方法,这表明发动机停止,并且该方法规定于是再次转至第十七步骤e17。
在第十八步骤e18中,测试出现在第二硬件接口输出100_5上的信号。在存在矩形波的情况下,则该方法规定转至第十九步骤e19,也就是电压源型传感器2运转良好。在不存在任何矩形波的情况下,则该方法规定转至第二十步骤e20。
在第十九步骤e19中,本发明的方法规定生成给发动机控制计算机4的至少一个其他模块的信息,即电压源型传感器2存在并运转良好。对控制信号和电压源型传感器2产生的信号进行处理以例如检测内燃发动机的转动状态。
在第二十步骤e20中,即在第二硬件接口输出100_5上出现的信号中不存在矩形波时,根据本发明的方法,在发动机控制计算机4的引脚上检测到电压源型传感器2处的故障,因此故障对应于开路。然后启动第二十一步骤e21。
在第二十一步骤期间,生成例如电压源型传感器2处的开路型故障的信息,生成失效(infirmation)并发送到发动机控制计算机4的模块以进行处理和决策。
藉由本发明,现在可以自动检测发动机控制计算机端子处的电压源和/或电流源型传感器的存在。此外,现在可以在发动机控制计算机的使用寿命期间改变传感器的类型,而无需根据传感器的类型改变发动机控制计算机。
硬件接口的电子电路以例示的名义而给出,而决不限制本发明的范围。关于本发明方法的步骤的进展及其数量,它们也是以例示的名义而给出的,并且本领域技术人员可以根据需要对其进行更改以实现相同的结果。