一种超宽带PDW实时融合方法
文献发布时间:2023-06-19 12:22:51
技术领域
本发明属于雷达侦察技术领域,具体为一种超宽带PDW实时融合方法。
背景技术
电子化战场中,电子环境复杂多变,雷达侦察接收机需要进行实时处理,检测敌方的雷达信号,生成PDW。PDW一般包含频率(RF)、脉冲幅度(PA)、脉冲宽度(PW)、到达时间(TOA)和到达角(AOA)等。其中,到达角需要多传感器支持,这就涉及到数据融合。
目前有文献提出一种基于TOA差匹配的时间对准方法,先进行时间对准,再根据频率、脉冲宽度等属性关联,并应用D-S融合公式进行数据级PDW判决融合。但这种方法在工程应用中,特别是在面临大带宽、高脉冲密度时,PDW间的比较比较复杂耗时。
发明内容
本发明提出了一种超宽带PDW实时融合方法。
实现本发明的技术解决方案为:一种超宽带PDW实时融合方法,具体步骤为:
步骤1:主、从处理器选取有效信号数据,实时发送给融合处理器;
步骤2:主处理器计算有效信号的频率、脉冲宽度、到达时间,形成PDW并实时发送给融合处理器;
步骤3:融合处理器根据接收到的PDW信息、有效信号数据,计算到达角和信号幅度,生成融合的PDW。
优选地,主、从处理器选取有效信号数据,实时发送给融合处理器的具体方法为:
步骤1.1:主、从处理器分别对传感器的采样数据进行FFT或者信道化处理;
步骤1.2:主处理器对FFT或者信道化处理后的数据进行信号检测,得到有效信号所在FFT径或信道号,并实时发送给从处理器;
步骤1.3:主、从处理器均根据步骤1.2得到的FFT径或信道号,选取出相应FFT径或信道的数据,并实时发送给融合处理器。
优选地,主、从处理器选取出的数据均通过高速收发器实时发送给融合处理器。
优选地,主处理器得到的有效信号所在FFT径或信道号通过高速收发器实时发送给从处理器。
优选地,融合处理器根据接收到的PDW信息、有效信号数据,计算到达角和信号幅度,生成融合的PDW的具体步骤为:
步骤3.1:融合处理器根据接收到的主处理器的PDW,捕获主、从处理器发送来的数据;
步骤3.2:融合处理器根据捕获的主、从处理器数据的幅相信息计算信号到达角和幅度,结合步骤3.1接收到的PDW信息,形成融合后的PDW。
优选地,融合处理器根据捕获的主、从处理器数据的幅相信息计算信号到达角和幅度,结合步骤3.1接收到的PDW信息,形成融合后的PDW的具体方法为:
每次捕获数据后,计算捕获数据的幅相信息;
根据幅相信息,使用比幅法或者比相法获得当前脉冲到达角;
比较当前捕获的主、从处理器数据的幅度值,以其最大值作为当前PDW的脉冲幅度;
将得到的脉冲到达角和脉冲幅度,和步骤3.1接收到的其余PDW信息合并,形成融合后的PDW。
本发明与现有技术相比,其显著优点为:本发明利用FFT或者信道化对超宽带信号进行分解处理检测,通过高速收发器进行信息的同步实时交互,实现了超宽带实时处理;从可实现角度看,主从处理器的实时交互避免了融合处理中对多传感器PDW信息的大量缓存比较,相对简便且易实现。
下面结合附图对本发明做进一步详细的描述。
附图说明
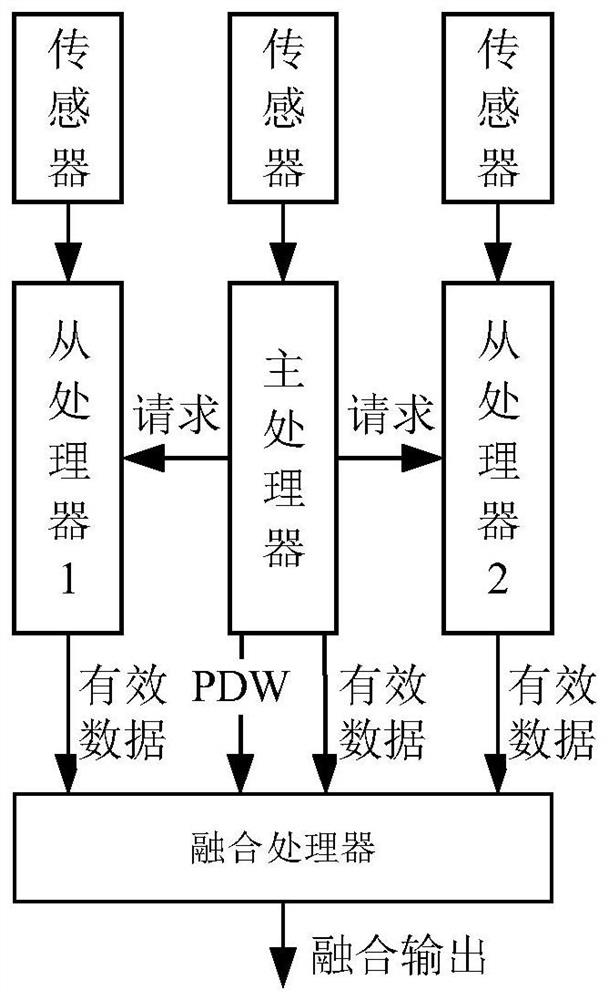
图1为本发明中传感器的关系示意图。
图2为本发明的流程示意图。
具体实施方式
如图1和图2所示,一种超宽带PDW实时融合方法,包括如下步骤:
步骤1:主、从处理器选取有效信号数据,通过高速收发器实时发送给融合处理器,具体步骤为:
步骤1.1:主、从处理器分别对传感器的采样数据进行FFT或者信道化处理。
本步骤的目的是将超宽带信号进行分解,具体的处理方法可以根据实际应用进行选择。本实施例以FFT处理为例。另外,本实施例中从处理器的数量以2为例,但不局限。
步骤1.2:主处理器对FFT或者信道化处理后的数据进行信号检测,得到有效信号所在FFT径或信道号,并通过高速收发器实时发送给从处理器。
在本实施例中,主处理器对FFT结果进行信号门限检测(以此为例,不局限,可根据实际应用进行选择),判别高于门限即为有效信号,同时给出其所在FFT径,并通过高速LVDS总线将该信息实时发送给各从处理器,请求各从处理器也根据此FFT径或信道号选取数据。
步骤1.3:主、从处理器均根据步骤1.2得到的FFT径或信道号,选取出相应FFT径或信道的数据,并通过高速收发器实时发送给融合处理器。应当注意到这里的数据发送是持续的。
步骤2:主处理器计算有效信号的频率、脉冲宽度、到达时间等信息,形成PDW并通过高速收发器实时发送给融合处理器。
步骤3:融合处理器根据接收到的PDW信息、有效信号数据,计算到达角和信号幅度,生成融合的PDW,具体步骤为:
步骤3.1:融合处理器根据接收到的主处理器的PDW,捕获主、从处理器发送来的数据。
具体地,融合处理器每次接收到主处理器的PDW时,同时生成一个有效标记,在此标记的一定时间范围内取出主、从处理器发送来的有效信号数据。这个时间范围需要根据实际情况确定,尽量避开脉冲信号不稳定的前后沿附近,以便提高到达时间和脉冲幅度的测量精度。
步骤3.2:融合处理器根据捕获的主、从处理器数据的幅相信息计算信号到达角和幅度,结合步骤3.1接收到的PDW信息,形成融合后的PDW。
每次捕获数据后,首先计算捕获数据的幅相信息,以捕获的主处理器数据为例(捕获的从处理器数据的幅相计算方法与此相同),记为X=X