一种具备力反馈效果的体感作业手套
文献发布时间:2023-06-19 13:29:16
技术领域
本发明涉及一种用于人机交互领域的具备力反馈效果的体感作业手套。
背景技术
随着海洋技术与空间技术的迅速发展,通过人工进行实时操作的远距离操作型机器人的运用场合迅速增加。同时,日常生活中的许多场景,例如医疗、灾难救助等场合,也需要远距离操作机器人的介入。力反馈技术用于对机器人进行远距离遥控操作,可使操作者具有较好的临场感,感知到操作目标周围的环境,从而作出更恰当的决策。
中国实用新型专利公开号:CN 211362244 U,名称:一种基于外骨骼数据手套和肌电手环的遥操作系统,该系统通过仿人外骨骼数据手套采集手部动作,用肌电手环采集手臂动作。该技术可通过驱动绳对手指进行力反馈,但手套整体为完全相连的刚性结构,且手指处有指帽,难以适应不同的手型,成本较高。
中国发明专利公开号:CN 111665937 A,名称:一种一体化自驱动全纺织手势识别数据手套。该发明提供了一种全纺织识别数据手套,能利用人体的运动自发电并获取手势。然而该手套没有力反馈,只能实现开环控制,用该手套进行操作时临场感较差。
发明内容
本发明的目的是为了克服现有技术的不足,提供一种具备力反馈效果的体感作业手套,它可以给与体感手套的使用者以力反馈,提高临场感,可广泛应用于工业、医疗、航空、娱乐等领域。
实现上述目的的一种技术方案是:一种具备力反馈效果的体感作业手套,包括基体和基架,还包括驱动电机、传感器和微控制器下位机;
所述基体为穿戴于手部的双层手套结构,所述传感器及其连接电路设置于所述基体夹层内,所述基架、所述驱动电机及所述微控制器下位机位于所述基体表面;
所述基架包括相互分离的手腕基架、手背基架和手指基架,所述手指基架包括指尖基架、指中段基架和指根基架,除拇指以外其余四指设有指尖基架、指中段基架和指根基架,拇指设有指尖基架和指根基架,所述指根基架通过驱动电机和驱动绳连接所述手背基架;
所述驱动电机与所述微控制器下位机连接并受其驱动实现驱动绳的放松与收紧,所述传感器包括位于指根基架内侧的力传感器和位于基架上的位置传感器,所述传感器与所述微控制器下位机信号连接。
进一步的,所述手腕基架、手背基架、指尖基架、指中段基架和指根基架背部设有插槽,手腕基架、手背基架、指根基架、指中段基架和指尖基架按顺序依次排布,任意相邻的两个基架通过插接在插槽内的活动连接结构相互连接。
进一步的,所述指尖基架为帽状,所述指中段基架、所述指根基架、所述手背基架和所述手腕基架为片状,所述指尖基架套接在整个手指端部,所述指中段基架和所述指根基架分别覆盖手指的指节,所述手背基架覆盖手背外侧,所述手腕基架覆盖所述手腕外侧。
进一步的,所述手背基架上设有卡槽,所述微控制器下位机嵌设于该卡槽内。
再进一步的,所述指尖基架与所述驱动电机连接,并在所述驱动电机的作用下对手指产生压力。
再进一步的,所述指尖基架内侧设有力传感器。
进一步的,对于每一个所述指尖基架、指中段基架、指根基架、手背基架和手腕基架均设有一个位于其上的所述位置传感器。
本发明的优点在于:(1)该手套结构简单,穿戴方便,手套内部刚体结构直接相连部分较少,能使手套适应不同的手型;(2)可对手指各个关节进行信息的获取,使采集的信息更全面;(3)所设计的数据手套包含驱动电机,可在指根处与指尖处产生力反馈,增强用户的临场感;(4)指根与指尖部分设有力传感器,可在用户与手套刚体部分具有较大作用力时采取安全措施,防止设备损坏。
附图说明
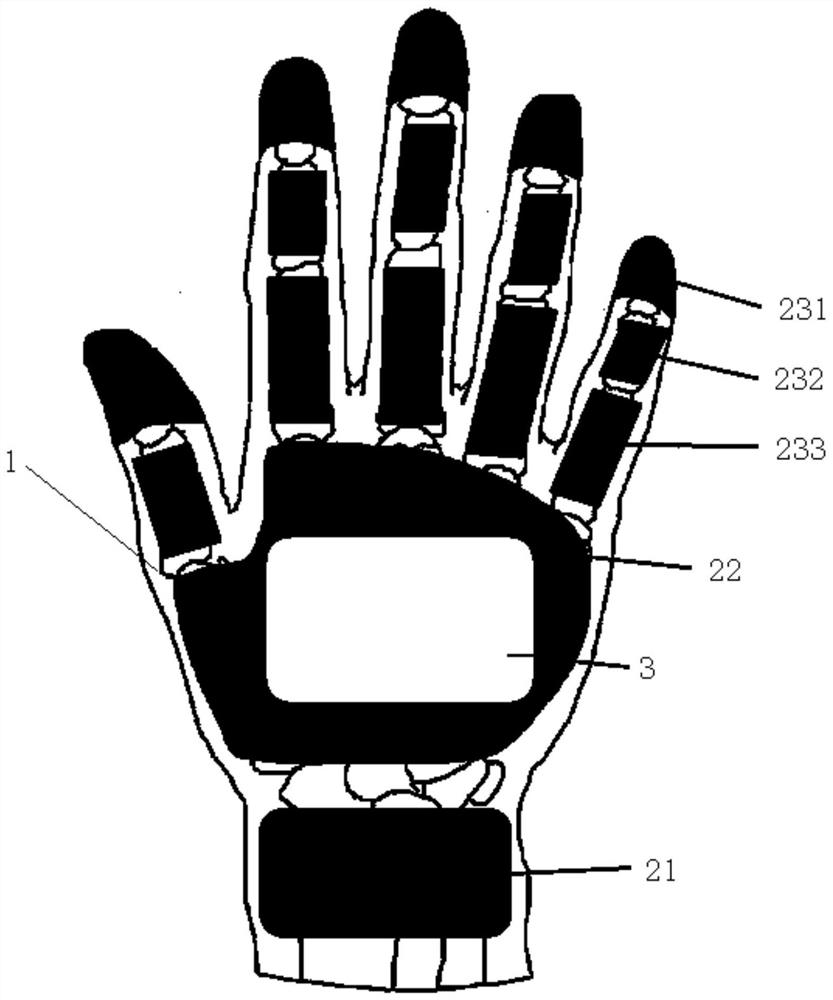
图1为本发明的一种具备力反馈效果的体感作业手套的结构示意图;
图2为本发明的一种具备力反馈效果的体感作业手套的功能流程图。
具体实施方式
为了能更好地对本发明的技术方案进行理解,下面通过具体地实施例进行详细地说明:
请参阅图1,本发明的一种具备力反馈效果的体感作业手套,包括基体1、基架、驱动电机、传感器和微控制器下位机3。
基体为穿戴于手部的双层手套结构,其由双层弹性材料制成,包裹整个手部与小臂前端。传感器及其连接电路设置于基体的双层手套结构的夹层内,包裹于两层材料间,基架、驱动电机及微控制器下位机3位于基体 1表面。手套状的基体利用内侧面料与手部的摩擦力进行固定,并附有弹性材料制成的固定绷带,可以在特殊情况下进行进一步的固定。
基架包括相互分离的手腕基架21、手背基架22和手指基架,手指基架包括指尖基架231、指中段基架232和指根基架233,手指基架间不通过刚性结构直接相连。除拇指以外其余四指设有指尖基架231、指中段基架232和指根基架233,拇指设有指尖基架231和指根基架233。手腕基架21、手背基架22、指尖基架231、指中段基架232和指根基架233背部设有插槽,手腕基架21、手背基架22、指根基架233、指中段基架232和指尖基架231按顺序依次排布,任意相邻的两个基架通过插接在插槽内的活动连接结构相互连接,用以减少结构的自由度,避免多余的计算。手腕基架21、手背基架22和手指基架由刚性材料构成。指尖基架231为帽状,指中段基架232、指根基架233、手背基架22和手腕基架21为片状。指尖基架231套接在整个手指端部,指中段基架232和指根基架233分别覆盖手指的指节,手背基架覆盖手背外侧,手腕基架覆盖手腕外侧。手背基架22上设有卡槽,微控制器下位机3嵌设于该卡槽内,实现对传感器数据的采集以及对驱动电机的控制。指根基架233通过驱动电机和驱动绳连接手背基架22,由驱动电机控制该关节转角,从而实现力反馈功能。所述手指基架安装有定滑轮,通过驱动电机和驱动绳与手背基架相连接。驱动电机与微控制器下位机3连接并受其驱动实现驱动绳的放松与收紧,从而实现力反馈功能。指尖基架231与驱动电机连接,并在驱动电机的作用下对手指产生压力,实现力反馈功能。
传感器包括力传感器和位置传感器。力传感器包括位于指根基架内侧的力传感器和位于指尖基架内侧的力传感器。所述位置传感器为非接触式传感器,对于每一个指尖基架、指中段基架、指根基架、手背基架和手腕基架均设有一个位于其上的位置传感器,用于检测每段手指基架与手背基架间的相对位置,以及手腕基架与手背基架间的相对位置。传感器与微控制器下位机信号连接。
微控制器下位机3的信号处理过程包括:(1)接收来自传感器电路的数据信息,计算得到操作者的动作信息,并传输给上位机。(2)接收来自上位机的反馈信息,操控驱动电机对操作者产生作用力,实现力反馈。(3) 接收来自力传感器的数据信息,计算得到操作者与手套刚性结构间的作用力,当作用力高于最大阈值时,操控驱动电机取消力反馈。请参阅图2,该系统的功能示意图。用户穿戴好所述体感作业手套,用户的手指与手腕动作信息由位置传感器进行采集,并传输至下位机。下位机将用户的手指信息与手腕信息上传至上位机,上位机对采到的数据进行分析,发出信号给操作目标,控制其进行相应的动作。控制目标机械上装有的力传感器会对力进行实时采集,并将信号传回上位机系统,上位机运算并发送控制信号给作业手套的下位机,从而控制驱动电机,产生反馈力。
本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本发明,而并非用作为对本发明的限定,只要在本发明的实质精神范围内,对以上所述实施例的变化、变型都将落在本发明的权利要求书范围内。