一种基于SCALEXIO的EPS系统故障注入测试平台及测试方法
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及一种EPS系统故障注入测试平台及测试方法,特别涉及一种基于SCALEXIO的EPS系统故障注入测试平台及测试方法。
背景技术
目前,汽车行业的一个主要发展趋势是不断提高车辆的自动化水平,从长远目标来看,是实现车辆的完全自动化驾驶。为了保证自动驾驶车辆的安全性,促进自动驾驶汽车行业的良性发展,美国汽车工程师协会(简称SAE)将自动驾驶技术进行了等级的划分,分为0、1、2、3、4、5共六个等级。其中0属于传统驾驶,即人工驾驶;1和2属于辅助驾驶,即系统对驾驶员提供驾驶辅助;3属于有条件的自动驾驶,车辆可以实现绝大部分路况的自动驾驶;4、5属于自动驾驶系统,即车辆可实现无人驾驶。
同时随着自动驾驶等级的提高,驾驶员在安全概念中的补偿作用在逐渐消失,对车辆的整个产品生命周期的功能安全也提出了更高的要求,ISO26262道路车辆功能安全标准推荐采用故障注入的测试方法验证系统安全设计的正确性和合理性。但是,目前现有的EPS系统故障注入测试平台,往往采用直接损害传感器、短接线路或基于模型的方法,导致故障注入测试具有较低的自动化程度和测试精度,另外难以满足面向自动驾驶的EPS系统的功能安全测试的需求。
发明内容
本发明的目的是为了解决现有的EPS系统故障注入测试平台,往往采用直接损害传感器、短接线路或基于模型的方法,导致故障注入测试具有较低的自动化程度和测试精度,另外难以满足面向自动驾驶的EPS系统的功能安全测试需求的问题而提供的一种基于SCALEXIO的EPS系统故障注入测试平台及测试方法。
本发明提供的基于SCALEXIO的EPS系统故障注入测试平台包括有底板、台架、上位机、SCALEXIO硬件系统、电源模块、负载电动缸、继电器和转向器总成,其中SCALEXIO硬件系统、电源模块、负载电动缸、继电器和转向器总成均装配在底板上,底板装配在台架后端,上位机设在台架的上端,上位机通过网线与SCALEXIO硬件系统相连接,台架上还装配有方向盘,方向盘通过转向管柱和万向传动轴与转向器总成相连接,转向器总成中ECU的方向盘转矩信号接口与转角信号接口分别与SCALEXIO硬件系统中的SENT信号发生通道以及CAN信号发生通道相连,SCALEXIO硬件系统将方向盘转矩以及转角信息以无故障的形式或者以注入故障的形式发送给转向器总成中的ECU,电源模块通过继电器与负载电动缸和转向器总成相连接,电源模块为负载电动缸和转向器总成提供电力,继电器与SCALEXIO硬件系统中的数字量输出通道相连接,SCALEXIO硬件系统通过输出数字量信号控制继电器开关来控制转向器总成和负载电动缸的上电与下电,负载电动缸与转向器总成之间通过连接件相连接。
台架的前方对应方向盘的位置处设置有座椅,座椅装配在台架上,底板为铝板。
方向盘下部的转向管柱上装配有转角传感器和转矩传感器,转角传感器和转矩传感器分别通过SENT以及CAN通讯接口与SCALEXIO硬件系统中的SENT信号测量通道以及CAN信号测量通道连接,转角传感器和转矩传感器分别与电源模块相连接并由电源模块提供电力。
负载电动缸与转向器总成之间的连接件上装配有拉压力传感器,拉压力传感器与SCALEXIO硬件系统相连接,SCALEXIO硬件系统通过模拟量接口接收拉压力传感器的采集信息,拉压力传感器与电源模块相连接并由电源模块提供电力。
SCALEXIO硬件系统为dSPACE公司生产的一款实时仿真平台,其包括多核处理器,DS2680 I/O板卡,2672总线模块,DS2671总线板卡以及内部集成的中央FIU单元;多核处理器用于运行仿真模型;I/O板卡包括数字量输入输出通道,模拟量输入输出通道,SENT信号输入输出通道;总线模块以及总线板卡包含多路总线通道,每个通道能够配置为CAN通道,用于实现Simulink中通讯模型与EPS系统ECU之间的实时通讯;内部集成的中央FIU单元用于模拟传感器接线故障;SCALEXIO硬件系统支持Simulink,CarSim,包含软件ConfigurationDesk、ControlDesk等,上位机用来为PreScan,CarSim,Simulink,ControlDesk,ConfigurationDesk等软件的设置以及控制算法的编写提供操作界面,同时用来监控仿真过程,显示、分析、保存仿真结果。
电源模块选用的是艾斯克斯IT6700系列可编程直流电源。
负载电动缸选用的型号是北京道臣ECB093。
拉压力传感器选用的型号是美国世铨STC-1.5t。
上述的上位机、继电器、转向器总成、转角传感器和转矩传感器均为现有设备的组装,因此,具体型号和规格没有进行赘述。
本发明提供的基于SCALEXIO的EPS系统故障注入测试方法,其方法如下所述:
第一步、通讯调试;
第二步、无故障模式硬件在环试验;
第三步、模拟传感器接线故障测试;
第四步、模拟传感器失效及CAN通信失效故障测试。
第一步中通讯调试的具体步骤如下:
步骤一、在CarSim中建立目标车辆的整车动力学模型,并根据需求选取输入输出变量,输入方向盘转角、车速、输出轮速和齿条端阻力信息;
步骤二、在Simulink中建立负载电动缸控制模型、电源模块控制模型以及EPS系统通讯模型;
步骤三、在ConfigurationDesk软件中为模型接口配置相应SCALEXIO硬件系统的I/O接口,并进行编译生成SDF、RTA、RTC、MAP文件,将编译生成的文件下载至多核实时处理器;
步骤四、在ControlDesk软件中建立人机交互界面,控制电源模块给转向器总成以及负载电动缸上电,并进行调试,保证转向器总成,各项高级驾驶辅助功能以及负载电动缸处于正常工作状态。
第二步中无故障模式硬件在环试验的具体步骤如下:
步骤一、在PreScan软件中调整系统设置参数以及车辆动力学模型参数,搭建智能驾驶车辆运行场景,并利用CAN卡实现上位机中PreScan模型与多核实时处理器中CarSim车辆动力学模型进行实时通讯;
步骤二、利用从PreSan中获取的环境信息以及从CarSim中获取的车辆状态信息,在Simulink中搭建高级自动驾驶控制算法,并与在环硬件的模型接口连接;
步骤三、在ConfigurationDesk软件中新建项目和试验,导入模型,为模型接口配置相应SCALEXIO硬件系统的I/O接口,并进行编译生成SDF、RTA、RTC和MAP文件,将编译生成的文件下载至多核实时处理器;
步骤四、在ControlDesk软件中新建项目和试验,建立人机交互界面,通过人机交互界面控制电源模块给转向器总成以及负载电动缸上电,并在无故障模式下完成硬件在环试验,试验的操控、数据监测及记录都通过ControlDesk实现。
第三步中模拟传感器接线故障测试的具体步骤如下:
步骤一、在ConfigurationDesk软件中新建项目和试验,导入无故障模式硬件在环试验所用模型,为模型接口配置相应SCALEXIO硬件系统的I/O接口,并对信号通道选取允许的故障类型,包括开路、对地短路、对电源短路、对信号发生通道短路、对信号测量通道短路和对总线通道短路,最后进行编译生成SDF、RTA、RTC和MAP文件,将编译生成的文件下载至多核实时处理器;
步骤二、在ControlDesk软件中新建项目和试验,建立人机交互界面,通过人机交互界面控制电源模块给转向器总成以及负载电动缸上电,在电气故障仿真端口界面建立相应的故障集,利用手动触发或软件触发的方式切换故障类型,对在环硬件开展故障注入测试,测试的操控、数据监测及记录都通过ControlDesk实现。
第四步中模拟传感器失效及CAN通信失效故障测试的具体步骤如下:
步骤一、在搭建的无故障模式硬件在环试验的Simulink模型中为需要注入故障的信号建立相应的故障模式,包括以下几种:
①传感器卡死:
y
式中,y
②传感器噪声大:
y
式中,y
③传感器漂移:
y
式中,μ
④传感器出现噪声与漂移的复合故障:
y
⑤对特定总线信号进行故障信息编辑和注入;
步骤二、在ConfigurationDesk软件中新建项目和试验,导入注入故障模型,为模型接口配置相应SCALEXIO硬件系统的I/O接口,并进行编译生成SDF、RTA、RTC和MAP文件,将编译生成的文件下载至多核实时处理器;
步骤三、在ControlDesk软件中新建项目和试验,建立人机交互界面,通过人机交互界面控制电源模块给转向器总成以及负载电动缸上电,并在变量管理窗口中将需要注入的故障变量拖入到相应的交互界面的控件中,通过人机交互界面控制故障注入的类型以及数值的大小,对在环硬件开展故障注入测试,测试的操控、数据监测及记录都通过ControlDesk实现。
本发明的有益效果:
本发明提供的技术方案是利用SCALEXIO硬件系统高效模拟传感器接线故障,传感器以及CAN通信失效故障等多种故障模式,操作方便、通用性强,同时具有更高的自动化程度,本发明搭建具有高精度模拟路面转向阻力的半实物在环仿真平台,提高测试结果的准确性,此外本发明通过PreScan,CarSim,Simulink等软件设置车辆自动驾驶场景以及算法模型,配合高精度的半实物在环仿真平台,能够实现从自动驾驶层面对EPS系统开展高自动化,高精度的故障注入测试,验证系统安全设计的正确性和合理性。
附图说明
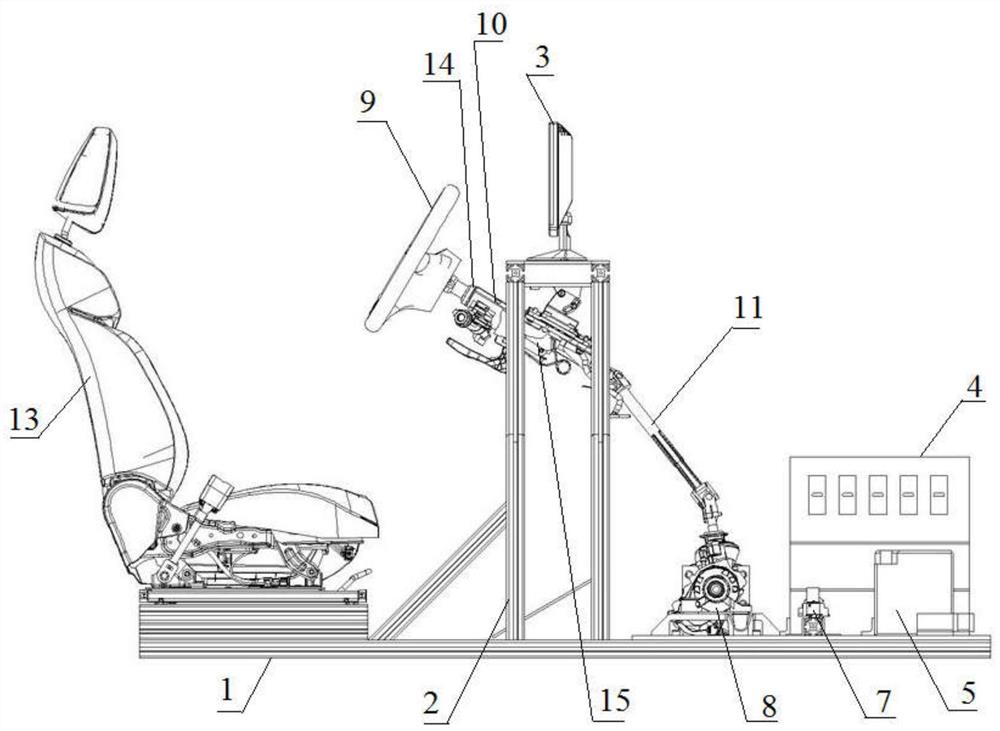
图1为本发明所述测试平台的正视图。
图2为本发明所述测试平台的俯视图。
图3为本发明所述测试平台的拓扑图。
图4为本发明所述测试方法的流程图。
上图中的标注如下:
1、底板 2、台架 3、上位机 4、SCALEXIO硬件系统 5、电源模块 6、负载电动缸 7、继电器 8、转向器总成 9、方向盘 10、转向管柱 11、万向传动轴 12、连接件 13、座椅 14、转角传感器 15、转矩传感器 16、拉压力传感器。
具体实施方式
请参阅图1至图4所示:
本发明提供的基于SCALEXIO的EPS系统故障注入测试平台包括有底板1、台架2、上位机3、SCALEXIO硬件系统4、电源模块5、负载电动缸6、继电器7和转向器总成8,其中SCALEXIO硬件系统4、电源模块5、负载电动缸6、继电器7和转向器总成8均装配在底板1上,底板1装配在台架2后端,上位机3设在台架2的上端,上位机3通过网线与SCALEXIO硬件系统4相连接,台架2上还装配有方向盘9,方向盘9通过转向管柱10和万向传动轴11与转向器总成8相连接,转向器总成8中ECU的方向盘转矩信号接口与转角信号接口分别与SCALEXIO硬件系统4中的SENT信号发生通道以及CAN信号发生通道相连,SCALEXIO硬件系统4将方向盘转矩以及转角信息以无故障的形式或者以注入故障的形式发送给转向器总成8中的ECU,电源模块5通过继电器7与负载电动缸6和转向器总成8相连接,电源模块5为负载电动缸6和转向器总成8提供电力,继电器7与SCALEXIO硬件系统4中的数字量输出通道相连接,SCALEXIO硬件系统4通过输出数字量信号控制继电器7开关来控制转向器总成8和负载电动缸6的上电与下电,负载电动缸6与转向器总成8之间通过连接件12相连接。
台架2的前方对应方向盘9的位置处设置有座椅13,座椅13装配在台架2上,底板1为铝板。
方向盘9下部的转向管柱10上装配有转角传感器14和转矩传感器15,转角传感器14和转矩传感器15分别通过SENT以及CAN通讯接口与SCALEXIO硬件系统4中的SENT信号测量通道以及CAN信号测量通道连接,转角传感器14和转矩传感器15分别与电源模块5相连接并由电源模块5提供电力。
负载电动缸6与转向器总成8之间的连接件12上装配有拉压力传感器16,拉压力传感器16与SCALEXIO硬件系统4相连接,SCALEXIO硬件系统4通过模拟量接口接收拉压力传感器16的采集信息,拉压力传感器16与电源模块5相连接并由电源模块5提供电力。
SCALEXIO硬件系统4为dSPACE公司生产的一款实时仿真平台,其包括多核处理器,DS2680 I/O板卡,2672总线模块,DS2671总线板卡以及内部集成的中央FIU单元;多核处理器用于运行仿真模型;I/O板卡包括数字量输入输出通道,模拟量输入输出通道,SENT信号输入输出通道;总线模块以及总线板卡包含多路总线通道,每个通道能够配置为CAN通道,用于实现Simulink中通讯模型与EPS系统ECU之间的实时通讯;内部集成的中央FIU单元用于模拟传感器接线故障;SCALEXIO硬件系统支持Simulink,CarSim,包含软件ConfigurationDesk、ControlDesk等,上位机用来为PreScan,CarSim,Simulink,ControlDesk,ConfigurationDesk等软件的设置以及控制算法的编写提供操作界面,同时用来监控仿真过程,显示、分析、保存仿真结果。
电源模块5选用的是艾斯克斯IT6700系列可编程直流电源。
负载电动缸6选用的型号是北京道臣ECB093。
拉压力传感器16选用的型号是美国世铨STC-1.5t。
上述的上位机3、继电器7、转向器总成8、转角传感器14和转矩传感器15均为现有设备的组装,因此,具体型号和规格没有进行赘述。
本发明提供的基于SCALEXIO的EPS系统故障注入测试方法,其方法如下所述:
第一步、通讯调试;
第二步、无故障模式硬件在环试验;
第三步、模拟传感器接线故障测试;
第四步、模拟传感器失效及CAN通信失效故障测试。
第一步中通讯调试的具体步骤如下:
步骤一、在CarSim中建立目标车辆的整车动力学模型,并根据需求选取输入输出变量,输入方向盘转角、车速、输出轮速和齿条端阻力信息;
步骤二、在Simulink中建立负载电动缸6控制模型、电源模块5控制模型以及EPS系统通讯模型;
步骤三、在ConfigurationDesk软件中为模型接口配置相应SCALEXIO硬件系统4的I/O接口,并进行编译生成SDF、RTA、RTC、MAP文件,将编译生成的文件下载至多核实时处理器;
步骤四、在ControlDesk软件中建立人机交互界面,控制电源模块5给转向器总成8以及负载电动缸6上电,并进行调试,保证转向器总成,各项高级驾驶辅助功能以及负载电动缸6处于正常工作状态。
第二步中无故障模式硬件在环试验的具体步骤如下:
步骤一、在PreScan软件中调整系统设置参数以及车辆动力学模型参数,搭建智能驾驶车辆运行场景,并利用CAN卡实现上位机3中PreScan模型与多核实时处理器中CarSim车辆动力学模型进行实时通讯;
步骤二、利用从PreSan中获取的环境信息以及从CarSim中获取的车辆状态信息,在Simulink中搭建高级自动驾驶控制算法,并与在环硬件的模型接口连接;
步骤三、在ConfigurationDesk软件中新建项目和试验,导入模型,为模型接口配置相应SCALEXIO硬件系统4的I/O接口,并进行编译生成SDF、RTA、RTC和MAP文件,将编译生成的文件下载至多核实时处理器;
步骤四、在ControlDesk软件中新建项目和试验,建立人机交互界面,通过人机交互界面控制电源模块5给转向器总成8以及负载电动缸6上电,并在无故障模式下完成硬件在环试验,试验的操控、数据监测及记录都通过ControlDesk实现。
第三步中模拟传感器接线故障测试的具体步骤如下:
步骤一、在ConfigurationDesk软件中新建项目和试验,导入无故障模式硬件在环试验所用模型,为模型接口配置相应SCALEXIO硬件系统4的I/O接口,并对信号通道选取允许的故障类型,包括开路、对地短路、对电源短路、对信号发生通道短路、对信号测量通道短路和对总线通道短路,最后进行编译生成SDF、RTA、RTC和MAP文件,将编译生成的文件下载至多核实时处理器;
步骤二、在ControlDesk软件中新建项目和试验,建立人机交互界面,通过人机交互界面控制电源模块5给转向器总成8以及负载电动缸6上电,在电气故障仿真端口界面建立相应的故障集,利用手动触发或软件触发的方式切换故障类型,对在环硬件开展故障注入测试,测试的操控、数据监测及记录都通过ControlDesk实现。
第四步中模拟传感器失效及CAN通信失效故障测试的具体步骤如下:
步骤一、在搭建的无故障模式硬件在环试验的Simulink模型中为需要注入故障的信号建立相应的故障模式,包括以下几种:
①传感器卡死:
y
式中,y
②传感器噪声大:
y
式中,y
③传感器漂移:
y
式中,μ
④传感器出现噪声与漂移的复合故障:
y
⑤对特定总线信号进行故障信息编辑和注入;
步骤二、在ConfigurationDesk软件中新建项目和试验,导入注入故障模型,为模型接口配置相应SCALEXIO硬件系统4的I/O接口,并进行编译生成SDF、RTA、RTC和MAP文件,将编译生成的文件下载至多核实时处理器;
步骤三、在ControlDesk软件中新建项目和试验,建立人机交互界面,通过人机交互界面控制电源模块5给转向器总成8以及负载电动缸6上电,并在变量管理窗口中将需要注入的故障变量拖入到相应的交互界面的控件中,通过人机交互界面控制故障注入的类型以及数值的大小,对在环硬件开展故障注入测试,测试的操控、数据监测及记录都通过ControlDesk实现。
- 一种基于SCALEXIO的EPS系统故障注入测试平台及测试方法
- 基于组件化分布式系统的故障注入仿真测试方法及系统