一种结合多轴旋翼的自旋翼飞行器
文献发布时间:2023-06-19 10:49:34
技术领域
本发明属于飞行器技术领域,具体涉及一种结合多轴旋翼的自旋翼飞行器。
背景技术
自旋翼飞行器是一种以自转旋翼作为升力面、螺旋桨推/拉力或其它供能方式为前进动力的旋翼类飞行器。自旋翼机的旋翼依靠飞行时前方来流驱动实现自转来提供升力。一旦它发动机空中停车,可以依靠自转旋翼安全着陆,因此历史上它曾被称为“最安全的飞行器”。但由于自旋翼飞行器起飞时需要一定的滑行跑道,无法垂直起降,在低空飞行时如遇到树木、电线杆等障碍物时不能很快拔升,从而导致该类自旋翼飞行器适用范围大幅减少,且使用过程中无法及时拔升或快速更改移动方向导致存在诸多安全隐患。。而常见的多轴旋翼飞行器,可以解决在狭小场地垂直起降的问题。
为此亟需研发一种兼有多轴旋翼飞行器和自旋翼飞行器优点的飞行器。
但是,目前大多数通过多轴旋翼和自旋翼简单结合的飞行器还存在诸多缺点,例如现有的该类飞行器的电池舱设置于机身内,不利于大功率电池组的散热和更换等问题,又例如目前结合多轴旋翼的自旋翼飞行器使用范围较窄,不能灵活应对各类使用场景等问题;进一步优化多轴旋翼自旋翼飞行器使其具有更高的稳定性、使用范围更广泛、续航能力更强等也是本领域技术人员亟需解决的问题。
发明内容
本发明为了解决背景技术中所提出的技术问题,提供了一种结合多轴旋翼的自旋翼飞行器。
本发明的技术方案为:
一种结合多轴旋翼的自旋翼飞行器,包括包括机身和两个关于所述机身纵向对称设置的多轴旋翼系统,所述多轴旋翼系统可拆卸的安装于所述机身上;所述机身顶部设置有自旋翼,所述机身底部设置有起落装置;所述机身上还设置有螺旋桨和驱动所述螺旋桨转动的第二驱动装置;
所述多轴旋翼系统包括:至少一个旋翼模块、至少一个电池模块、支架;
所述电池模块挂载于所述支架模块或所述机身外部;
所述旋翼模块包括至少一个旋翼以及用于驱动所述旋翼转动的第一驱动装置,所述旋翼模块通过旋翼架安装于所述支架上。
进一步优选的,所述多轴旋翼系统包括至少两个旋翼模块,所述旋翼模块两两共用一所述旋翼架,且两所述旋翼模块关于所述机身的平均重心对称设置。
进一步优选的,所述多轴旋翼系统包括四个旋翼模块,两所述旋翼模块共用一所述旋翼架,其中两所述旋翼模块设置于机身头部,另外两所述旋翼模块设置于机身平均重心位置处,设置于机身头部的两所述旋翼模块中的所述旋翼小于另外两所述旋翼模块中的旋翼。
进一步优选的,所述旋翼模块包括两个旋翼,且两所述旋翼上下同轴设置。
进一步优选的,所述旋翼模块还包括防护罩,所述防护罩围设于所述旋翼周侧,所述防护罩设置于所述旋翼架上。
进一步优选的,所述电池模块吊挂于所述支架下方。
进一步优选的,所述支架一端与所述机身连接,另一端沿机身纵向向所述机身头部前倾。
进一步优选的,所述多轴旋翼系统包括两个电池模块,两个所述电池模块沿所述支架的长度方向排布。
进一步优选的,多个所述电池模块的重心与飞行器的平均重心位于同一竖向高度。
进一步优选的,所述支架下方设置有用于储放所述电池模块的吊舱,所述吊舱通过拆卸组件与所述支架可拆卸连接。
进一步优选的,所述支架上与所述吊舱对应的位置处设置吊舱加强肋,所述吊舱通过拆卸组件吊挂于所述吊舱加强肋上。
进一步优选的,所述拆卸组件包括:连接座,其具有一插口,所述连接座固定于所述支架上;连接头,设置于所述吊舱上,所述连接头与所述插口匹配,所述连接头插设于所述插口内,实现所述连接头的径向限位;径向插件,沿所述连接座径向插设于所述连接座和所述连接头,实现所述连接头的轴向限位;固定件,用于限制所述径向插件径向移动脱离所述连接座和所述连接头。
进一步优选的,所述拆卸组件还包括加强框架,所述吊舱和所述旋翼纵梁周侧均围设有所述加强框架;所述连接头设置于所述加强框架上。
进一步优选的,所述径向插件和所述固定件均为插销结构。
进一步优选的,所述支架的横截面为椭圆流线型截面。
进一步优选的,所述支架的横截面为圆形。
进一步优选的,所述支架为机翼结构。
进一步优选的,还包括支撑梁,所述支撑梁一端与所述支架连接,一端与所述机身连接,所述支撑梁与所述机身、所述支架连接呈三角结构。
进一步优选的,还包括燃油动力装置和控制系统;所述控制系统和所述电池模块及所述燃油动力装置连接,所述控制系统根据飞行器的飞行状态控制所述燃油动力装置和所述电池模块为所述第二驱动装置和所述第一驱动装置提供动力。
进一步优选的,包括控制系统和电力动力装置,所述电力动力装置至少包括所述电池模块,所述控制系统控制所述电力动力装置分别为所述第一驱动装置、所述第二驱动装置提供动力。
进一步优选的,结合多轴旋翼的自旋翼飞行器为载人飞行器;当安装有所述多轴旋翼系统时构成多轴旋翼自旋翼结合的载人飞行器;当拆卸所述多轴旋翼系统时构成自旋翼载人飞行器。
进一步优选的,安装有所述多轴旋翼系统时,飞行器载人后的总重量小于或等于飞行器的最大许可起飞重量。
本发明提供了一种结合多轴旋翼的自旋翼飞行器,使其与现有技术相比具有以下的优点和积极效果:
本发明中创造性的将电池组吊挂设置于飞行器外部,其优点在于:一、无需在机身内另外设置电池舱占用机身内部本就局促的空间,也无需额外加长机身扩大飞行器内部空间,避免增加飞行器的设计难度和生产成本;二、电池组外挂于飞行器外部有利于电池的快速拆卸更换,飞行器到达目的地后可直接更换备用电池,无需等待充电,有效提高工作效率;三、旋翼的第一驱动装置工作时电池高功率放电同时高功率放热,电池设置于机身内部不利于电池散热,为电池组布置液冷系统又会增加重量并增加系统的复杂性;本发明通过将电池外挂,电池模块直接暴露于空气中,利用风冷提高电池组的散热能力,当飞行器不航行时,电池可取出储放于室内,避免环境温度非常低时电池电量损耗严重,提高电池寿命,从而机身内部无需额外配备冷却系统和保温系统。
进一步的,在本发明中,多轴旋翼系统可拆卸且优选的飞行器为载人飞行器;当安装多轴旋翼系统时,构成多轴旋翼自旋翼结合的载人飞行器;当拆卸多轴旋翼系统后,构成的自旋翼飞行器仍然可以载人,满足载人飞行器的适航标准及规范,扩大飞行器的应用范围。
进一步的,在本发明中,可根据不同最大起飞重量的应用场景,更换适配构型的自旋翼,有效扩大飞行器的应用范围。
附图说明
结合附图,通过下文的述详细说明,可更清楚地理解本发明的上述及其他特征和优点,其中:
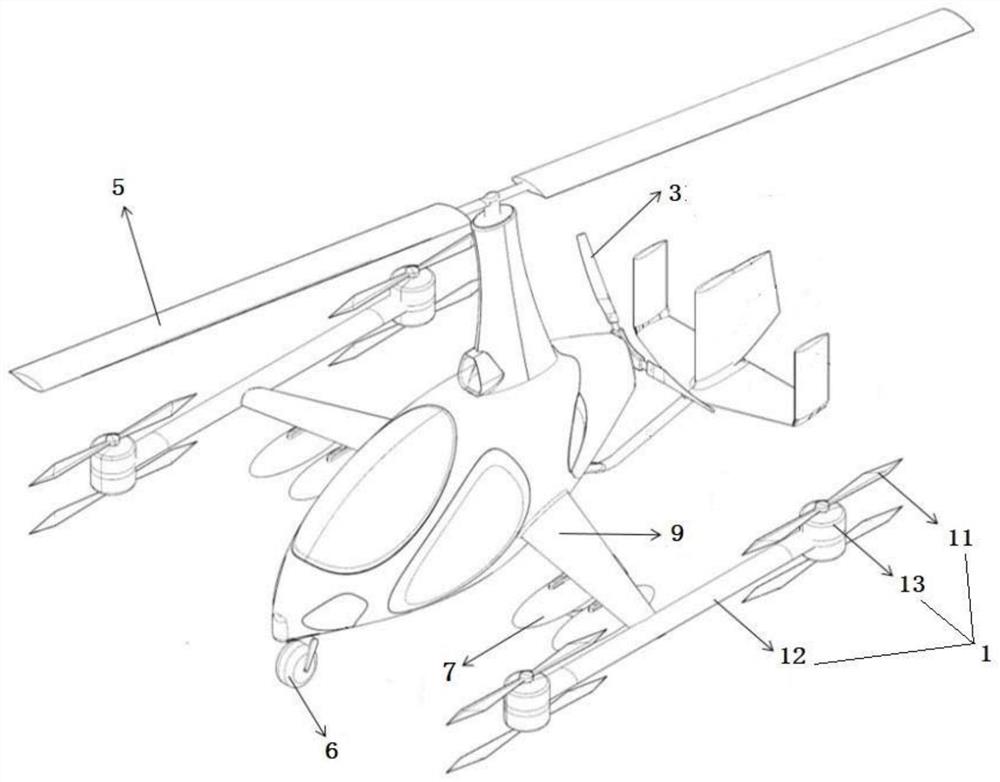
图1为本发明实施例1中结合多轴旋翼的自旋翼飞行器的示意图;
图2为本发明实施例1中结合多轴旋翼的自旋翼飞行器的俯视图;
图3为本发明实施例1中吊舱安装于支架上的示意图;
图4为本发明实施例1中吊舱的俯视示意图;
图5为本发明实施例1中拆卸组件的结构示意图;
图6为本发明实施例2中结合多轴旋翼的自旋翼飞行器的示意图;
图7为本发明实施例3中结合多轴旋翼的自旋翼飞行器的示意图;
图8为本发明实施例4中结合多轴旋翼的自旋翼飞行器的示意图;
图9为本发明实施例5中结合多轴旋翼的自旋翼飞行器的示意图;
图10为本发明实施例6中结合多轴旋翼的自旋翼飞行器的示意图。
符号说明:
1-旋翼模块;11-旋翼;12-旋翼架;13-第一驱动装置;14-防护罩;
2-拆卸组件;21-连接座;22-加强框架;23-连接头;24-径向插件;25-固定件;
3-螺旋桨;4-机身;5-自旋翼;6-起落装置;7-电池模块;8-吊舱;9-支架;10-支撑梁;
具体实施方式
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
为使图面简洁,各图中只示意性地表示出了与本发明相关的部分,它们并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。
实施例1
参照图1-5,本发明提供了一种结合多轴旋翼的自旋翼飞行器,包括机身4和两个关于机身纵向对称设置多轴旋翼系统,多轴旋翼系统可拆卸的安装于机身上;机身4顶部设置有自旋翼5,机身4底部设置有起落装置6;机身上还设置有螺旋桨3和驱动螺旋桨转动的第二驱动装置;
多轴旋翼系统包括:至少一个旋翼模块、至少一组电池模块、支架;电池模块7挂载于支架或机身4外部;旋翼模块包括至少一个旋翼11以及用于驱动旋翼转动的第一驱动装置13,旋翼模块通过旋翼架12安装于支架上。
本发明中创造性的将电池组吊挂设置于飞行器外部,其优点在于:一、无需在机身内另外设置电池舱占用机身内部本就局促的空间,也无需额外加长机身扩大飞行器内部空间,避免增加飞行器的设计难度和生产成本;二、电池组外挂于飞行器外部有利于电池的快速拆卸更换,飞行器到达目的地后可直接更换备用电池,无需等待充电,有效提高工作效率;三、旋翼的第一驱动装置工作时电池高功率放电同时高功率放热,电池设置于机身内部不利于电池散热,为电池组布置液冷系统又会增加重量并增加系统的复杂性;本发明通过将电池外挂,电池模块直接暴露于空气中,利用风冷提高电池组的散热能力,当飞行器不航行时,电池可取出储放于室内,避免环境温度非常低时电池电量损耗严重,提高电池寿命,从而机身内部无需额外配备冷却系统和保温系统。
在本实施例中,具体的起落装置6为前三点式不可收放起落架,前轮可由脚蹬操纵实现地面转弯,主轮带有同步刹车。
本实施例中。机身尾部设置有尾翼,尾翼可以平尾或V型尾翼或其他构型的尾翼,此处不做限制。
本实施例中的螺旋桨3设置于机身4尾端。当然在其他实施例中,螺旋桨也可以设置于机身头部。
在本实施例中,参阅图1,多轴旋翼系统包括至少两个旋翼模块,即机身4每一侧各有两个旋翼模块,使得在调控飞行器的飞行姿态时可从四个自由度进行调控,增强飞行器飞行的稳定性和灵活性。当然在其他实施例中,旋翼模块设置的组数不局限于以上所述,可根据飞行器的构型以及所需的垂直起降的升力大小、调控的稳定性灵敏性等调整旋翼模块的个数。例如多轴旋翼系统包括四个旋翼模块或五个旋翼模块等。
进一步优选的,在本实施例中,参阅图1,位于机身同一侧的旋翼模块两两共用一旋翼架12,两旋翼模块分别设置于旋翼架12的两端且位于同一水平面上,特别注意的是,两旋翼模块关于机身的平均重心对称设置,且两多轴旋翼系统中对应的两旋翼模块关于机身纵向相互对称的从而使得机身两侧和机身前后方向的旋翼模块两两相互对称,拉力基本相当,飞行器受力平衡,从而无需损耗过多的能量用于调节各旋翼之间的平衡,大大减少了能量的损耗。当然在其他实施例中,每个多轴旋翼系统内的两旋翼模块的相对位置不局限于以上所述,可根据机身的结构和实际应用做相应的布局调整。当然在其他实施例中,也可以是每个旋翼模块对应一旋翼架。
进一步的,在本实施例中,参阅图1,优选的旋翼模块包括两个旋翼11,且两旋翼11上下同轴设置,形成共轴式双旋翼的方式,大幅提升每个螺旋桨模块的总功率,其垂直起降升力变强的同时结构更紧凑,其占用的空间体积相更小,重量效率更高;进一步的,共轴双旋翼的方式使得在悬停状态下两同轴旋翼间的气动干扰会产生有利影响,提高悬停效率。
在本实施例中,参阅图1-3,电池模块7挂载于支架下方。此时电池模块7的重力方向和支架受到的升力方向相反,能够抵消支架和机身上的的一部分气动弯矩,因此,支架挂载重物后,其强度反而过剩,因此对支架的强度要求可以适当降低,且对机身也无需进行额外的补强设计,简化设计难度。当然在其他实施例中,电池模块挂载的位置不局限于支架,例如也可以挂载于机身外部。
在本实施例中,支架9内部的承力梁与机身内部的梁螺栓连接,在机舱内即可完成支架与机身的连接,拆卸方便且利于检修。当然也可以采用插销连接结合螺栓连接的方式;当然可以通过在机身上设置接头,支架通过与接头与机身连接,此处不做限制。
进一步优选的,在本实施例中,参阅图2,支架9一端与机身4连接,另一端沿机身纵向向机身头部前倾形成前掠式布局,如此支架可避开飞行器机舱门的位置布置,且使得位于机身同一侧的两旋翼模块能够关于机身的平均重心对称,并且使支架下方挂载的电池模块尽可能的靠近机身的平均重心纵向,整机重量分布更均匀,大大提高了飞行器的稳定性和平衡。当然在其他实施例中,支架设置的方向以及位置不局限于以上所述或图中所示,需根据机身的实际布局做对应的调整,避免支架阻碍进出飞行器且保障旋翼模块和电池模块布局合理。例如支架也可以是沿机身对称设置的圆圈形支架或两个相向倾斜呈八字型的支架。
在本实施例中,进一步优选的,参阅图2,多轴旋翼系统包括两个电池模块7,两个电池模块7沿支架9的长度方向排布,在支架9为前掠式布局的基础上,两电池模块沿支架的延伸方向设置,使得电池模块尽可能的靠近机身的平均重心纵向,整机重量分布更均匀,大大提高了飞行器的稳定性和平衡。当然在其他实施例中,电池模块的布局不局限于以上所述。
进一步优选的,多个电池模块7的重心与飞行器的平均重心位于同一竖向高度,使得在挂载电池模块时飞行器的平均重心不存在竖直方向上的移动。
在本实施例中,参阅图1-5,支架9下方设置有用于储放电池模块的吊舱8,吊舱8通过拆卸组件2与支架可拆卸连接。通过设置吊舱,便于快速的安装电池模块,且吊舱内还可以设置冷却或保温装置用于对加快电池模块的冷却或保温速度。
进一步优选的,支架9上与吊舱8对应的位置处设置吊舱加强肋,吊舱通过拆卸组件2吊挂于吊舱加强肋上,避免支架局部受力过大,延长支架的使用寿命。
在本实施例中,参阅图3-5,拆卸组件2包括:连接座21,其具有一插口,连接座21固定于支架9上;连接头23,设置于吊舱8上,连接头23与插口匹配,连接头23插设于插口内,实现连接头的径向限位;径向插件24,沿连接座21径向插设于连接座21和连接头23,实现连接头的轴向限位;固定件25,用于限制径向插件24径向移动脱离连接座21和连接头23。通过拆卸结构可实现吊舱和电池模块的快速拆卸和更换。当然在其他实施例中,拆卸组件的具体结构不局限于以上所述或图中所示,例如也可以是其他连接组件。
进一步优选的,在本实施例中,参阅图4、5,拆卸组件2还包括加强框架22,吊舱8周侧围设有加强框架22;连接头23设置于加强框架22上,加强框架用于提高吊舱的强度。
在本实施例中,径向插件24和固定件25均为插销结构,当然在其他实施例中,径向插件和固定件的具体结构不局限于以上所述,例如也可以是其他连接件或螺母、螺栓结构等。
在本实施例中,参阅图3,优选的支架9的横截面为椭圆流线型截面,其底部可提供更大的面积用于悬挂电池模块,从而支架对电池模块的支撑更稳定,强度更高;且流线型的支架既能产生升力补充飞行器的升力,又不会增大空气阻力。当然在其他实施例中,支架的截面形状不局限于以上所述或图中所示,例如支架的横截面也可以是圆形。
在本实施例中,结合多轴旋翼的自旋翼飞行器包括燃油动力装置和控制系统;控制系统和电池模块及燃油动力装置连接,控制器可控制电池模块和燃油动力装置一起输出动力。其中电池模块和燃油动力装置均可为飞行器提供动力,两者的动力可共同输出或单独输出至对应的装置。例如电池模块为第一驱动装置提供能量,从而第一驱动装置驱动旋翼转动,实现飞行器垂直起降、多轴模式的低速飞行等,而燃油动力装置的燃油发动机为第二驱动装置提供动力,驱动推进模块中的螺旋桨转动,为飞机的滑跑起降和正常飞行提供前进的动力。当然电池模块和燃油发动机也可以共同为第一驱动装置、第二驱动装置提供动力。
当然在其他实施例中,结合多轴旋翼的自旋翼飞行器的动力全部来源于电力动力系统,控制系统控制电力动力装置为第一驱动装置13、第二驱动装置提供动力,其中第二驱动装置的发动机为电动发动机。电力动力系统的动力来源于以上所述的电池模块和/或额外设置的电池组,无需设置燃油动力装置。
在本实施例中,优选的飞行器为载人飞行器,参阅图1,当安装有多轴旋翼系统时时,飞行器构成多轴旋翼自旋翼结合的载人飞行器;当然在其他实施例中,拆卸多轴旋翼系统后,飞行器构成自旋翼飞行器,值得注意的是,该自旋翼飞行器仍然可载人。可根据使用需求选择合适的构型,扩大飞行器的应用范围。其中无论多轴旋翼系统是否安装,均需确保构成的飞行器均可载人,均满足载人飞行器的适航审定标准,从而相比于现有技术,本发明通过对机身进行减重设计,降低飞行器的空机重量,使得本发明中的自旋翼飞行器的空机重量远小于现有技术中的自旋翼飞行器的空机重量,以确保飞行器强度满足两种构型转换下仍能满足载人要求。
进一步的,在本发明中,安装多轴旋翼系统时,飞行器载人后的总重量仍然小于或等于飞行器的最大许可起飞重量,确保该飞机在任何构型下满足载人飞机的适航标准。
在本发明中,可根据飞行器的最大许可起飞重量更换不同构型的自旋翼。例如针对于最大起飞重量较轻的飞机器需换装较小的自旋翼。根据应用场合适配对应自旋翼,灵活变化机型,使用范围更广。其中需注意的是,不同构型的自旋翼与机身的接口相匹配,确保不同构型的自旋翼可换装于同一机身上。
实施例2
本实施例是基于实施例1的基础上做的改进,参阅图6,本实施例相比于实施例1的区别在于:
在本实施例中,飞行器还包括支撑梁10,支撑梁10一端与支架9连接,一端与机身4连接,支撑梁10与机身4、支架9连接呈三角结构,有效的增强了支架的强度。具体的,在本实施例中,参阅图6,支撑梁一端与机身内部的自旋翼的承力梁连接,一端与支架连接呈三角结构,当然在其他实施例中,支撑梁也可以与机身的主传力梁连接呈三角结构,即支撑梁和支架位于同一水平面。
本实施例中的其他结构及其连接关系均与实施例1相同,此处不再赘述。
实施例3
本实施例是基于实施例2的基础上做的改进,参阅图7,本实施例相比于实施例1的区别在于:在本实施例中,支架9的横截面为圆形。在飞行器前进时起飞时,横截面为椭圆流线型的支架,也会产生升力,对整机的平衡和稳定造成一定的影响,从而本实施例中通过设置圆柱状的支架,支架受风力的面积变小,从而飞行时支架受到的升力变小甚至消失,减少对飞行器平衡性和稳定性的影响,有利于更准确的操控飞行器飞行。本实施例中的其他结构及其连接关系均与实施例1相同,此处不再赘述。
实施例4
本实施例是在实施例1的基础上做的改进,本实施例与实施例1的区别在于:
在本实施例中,参阅图8,多轴旋翼系统包括四个旋翼模块1,两两旋翼模块1共用一旋翼架12和一支架10,其中两旋翼模块1设置于机身头部,另外两旋翼模块设置于机身平均重心位置处,设置于机身头部的两旋翼模块中的旋翼的长宽小于另外两旋翼模块中的旋翼,从而在进一步提高飞行器升力的同时可有效降低机身头部的旋翼模块对机身的平均重心的影响。
本实施例中的其他结构及其连接关系均与实施例1相同,此处不再赘述。
实施例5
本实施例是在实施例1的基础上做的改进,本实施例与实施例1的区别在于:
在本实施例中,参阅图9,旋翼模块还包括防护罩14,防护罩14围设于旋翼周侧,从而在不影响旋翼竖向气流流动的同时,可对旋翼起到保护作用,防止旋翼转动时误伤的人或物,当然也可防止高速转动时旋翼松动脱落而打到机身上等。在本实施例中,每个旋翼配备一防护罩,防护罩的横截面为圆形围设于旋翼周侧,其中防护罩设置于旋翼架上。当然在其他实施例中,防护罩的具体形状不局限于以上所述或图中所示。例如防护罩横截面也可以是椭圆形的防护罩。
本实施例中的其他结构及其连接关系均与实施例1相同,此处不再赘述。
实施例6
本实施例是基于实施例1的基础上做的改进,参阅图10,本实施例相比于实施例1的区别在于:
在本实施例中,支架9为机翼结构,在飞行器滑行起降时,机翼结构进一步的为飞行器提供升力,使得对旋翼的功率要求更低。当然在其他实施例中,支架的具体结构不局限于以上所述或图中所示。
进一步的,在本实施例中,多轴旋翼系统包括四个旋翼模块,两旋翼模块1共用一旋翼架12,且该两旋翼模块关于机身的平均重心对称设置,大大提高了飞行器的稳定性和平衡。
本实施例中的其他结构及其连接关系均与实施例1相同,此处不再赘述。
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式。即使对本发明作出各种变化,倘若这些变化属于本发明权利要求及其等同技术的范围之内,则仍落入在本发明的保护范围之中。
- 一种结合多轴旋翼的自旋翼飞行器
- 一种飞行玩具的旋翼及安装该旋翼的多轴飞行器