海洋浅地层剖面探测系统及方法
文献发布时间:2023-06-19 11:16:08
技术领域
本发明属于海洋地质环境探测技术领域,尤其涉及一种海洋浅地层剖面探测系统及方法。
背景技术
在海洋地质环境调查过程中,为了探查海底地层结构、产状、海底埋藏物、以及古河道、浅层气、海底滑坡等灾害地质因素,通常利用浅地层剖面、单道地震、多道地震等海洋地球物理探测方法来进行调查作业。传统的剖面技术只能生成沿航迹方向的二维声学地层图像,然而二维剖面在判断地质体规模,尤其在搜索浅埋不连续小目标时存在一定局限性,具体表现为测线密度有限、空间分辨力不足、绕射现象造成的海底变形严重等,同时在浅水区域及水面环境复杂的区域,拖曳作业往往施工难度较大,时常发生震源、接收阵浮态不良,甚至被水面障碍物剐蹭损坏的情况。
水下不连续小目标是指处于海底或埋藏在海床以下一定深度的特征目标物,如弃锚、沉船、方箱、油桶、炸弹等,对于水下浅埋不连续小目标探测是海洋工程勘察、海洋军事应用中的难点,通常使用声学、磁法等方式进行,通过调查船拖曳主动声呐、磁探仪等设备,按预设测线进行扫测,然而在滩浅海及浅水水域,大型调查船机动能力受限,同时由于声学探测的接收阵多为长度较大的等浮线缆或沉入水下一定深度的拖体,存在两方面困难,一方面拖曳设备施工安全无法保证,另一方面受水深限制,线状阵、拖体通过信号叠加提高接收精度的优势也无法发挥。
发明内容
本发明实施例提供了一种海洋浅地层剖面探测系统及方法,实现海底高分辨力三维剖面探测及浅水区高精度水下埋藏不连续小目标探测。
为解决上述技术问题,一方面,本发明实施例提供了一种海洋浅地层剖面探测系统,包括水面航行器,设置于所述水面航行器上的探测控制处理器,还包括设置于所述水面航行器下方的震源和多个水听器,所述多个水听器以所述震源为中心构成一个相对位置固定的接收阵列,且所述多个水听器和所述震源处于同一平面上,所述震源用于向海洋浅地层发射声脉冲波,所述多个水听器用于接收从不同方位反射回的声脉冲波,所述探测控制处理器根据所述多个水听器接收反射声脉冲波的时刻以及所述多个水听器的位置确定探测目标物体的位置。
根据本发明的一实施方式,所述海洋浅地层剖面探测系统还包括定位导航器,所述定位导航器用于获取卫星导航系统提供的授时信息和平面位置信息。
根据本发明的另一实施方式,所述多个水听器排布成N×N的阵列,所述水听器的数量为N
根据本发明的另一实施方式,所述多个水听器和所述震源排布成N×N的阵列,所述水听器的数量为N
根据本发明的另一实施方式,所述水听器为压电陶瓷水听器、压阻式水听器或者电阻式水听器。
根据本发明的另一实施方式,所述震源为压电陶瓷震源、布默震源或者电火花震源。
另一方面,本发明实施例还提供了一种海洋浅地层剖面探测方法,包括:
震源向海洋浅地层发射声脉冲波;
多个水听器接收从不同方位反射回的声脉冲波,并获取多个所述水听器的测量时刻和测量位置;
根据多个所述水听器的测量时间和测量位置利用空间交汇算法确定探测目标物体的位置。
根据本发明的一实施方式,所述根据多个所述水听器的测量时间和测量位置利用空间交汇算法确定探测目标物体的位置的步骤包括:
根据每个所述水听器的测量时刻T
根据每个所述水听器的测量位置SP
根据边界条件在每个所述球体S
重复创建K个集合C
分别计算每个所述集合C
根据所述局部期望E
如果所述全局方差D满足预设条件,则判定所述全局期望E对应的位置为探测目标物体的位置。
根据本发明的另一实施方式,所述根据每个所述水听器的测量位置SP
创建当前时刻的全局坐标系;
利用时空对准算法将每个所述水听器的测量位置SP
根据每个所述水听器的测量开角和球面表达式确定每个所述水听器对应的球面计算公式及参数取值;
建立每个所述水听器对应的球体S
根据本发明的另一实施方式,所述预设条件为全局方差D≤Dmin,所述Dmin为预设阈值,小于这个阈值就符合筛选要求。
本发明的有益效果:
本发明实施例的海洋浅地层剖面探测系统将震源、排架式接收阵搭载在水面航行器上,通过单源、多源发射,多点高密度接收,有效提高测线密度,利用多余观测压制绕射,提高探测精度,通过空间交汇算法,实现海底高分辨力三维剖面探测及浅水区高精度水下埋藏不连续小目标探测,改善传统作业方法水下小目标探测浅水区施工难度大、风险高、效率低的问题。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1是本发明的海洋浅地层剖面探测系统的一个实施例的示意图;
图2是本发明的海洋浅地层剖面探测系统的另一个实施例的结构框图;
图3是本发明的海洋浅地层剖面探测系统中震源和多个水听器排布的一个实施例的示意图;
图4是本发明的海洋浅地层剖面探测系统中震源和多个水听器排布的另一个实施例的示意图;
图5是本发明的海洋浅地层剖面探测系统探测时发射和接收的一个实施例的示意图;
图6是本发明的海洋浅地层剖面探测方法的一个实施例的流程示意图;
图7是本发明的海洋浅地层剖面探测方法的步骤600一个实施例的流程示意图。
图8是本发明的海洋浅地层剖面探测方法的步骤602的一个实施例的流程示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参见图1所示,本发明实施例提供了一种海洋浅地层剖面探测系统100,包括水面航行器1,设置于水面航行器1上的探测控制处理器2,还包括设置于水面航行器1下方的震源3和多个水听器4,多个水听器4以震源3为中心构成一个相对位置固定的接收阵列,且多个水听器4和震源3处于同一平面上,震源3用于向海洋浅地层发射声脉冲波,多个水听器4用于接收从不同方位反射回的声脉冲波,探测控制处理器2根据多个水听器接收反射声脉冲波的时刻以及多个水听器的位置确定探测目标物体5的位置。
需要说明的是,本实施例中水面航行器可以为探测船或者探测浮标,在此不做具体限定。
本发明实施例的海洋浅地层剖面探测系统将震源、排架式接收阵搭载在水面航行器上,通过单源、多源发射,多点高密度接收,有效提高测线密度,利用多余观测压制绕射,提高探测精度,通过空间交汇算法,实现海底高分辨力三维剖面探测及浅水区高精度水下埋藏不连续小目标探测,改善传统作业方法水下小目标探测浅水区施工难度大、风险高、效率低的问题。
在一些实施例中,参见图2所示,本发明的海洋浅地层剖面探测系统100还包括定位导航器6,定位导航器6用于获取卫星导航系统提供的授时信息和平面位置信息。本发明实施例的海洋浅地层剖面探测系统通过定位导航器获取卫星导航系统的定位和授时信息,以保证对水下埋藏不连续小目标探测的精度。
在一些实施例中,参见图3所示,本发明的海洋浅地层剖面探测系统100中多个水听器4排布成N×N的阵列,水听器4的数量为N
在一些实施例中,参见图4所示,本发明的海洋浅地层剖面探测系统100中多个水听器4和震源3排布成N×N的阵列,水听器4的数量为N
本发明实施例的海洋浅地层剖面探测系统采用3D浅剖阵,相比于2D剖面测量,3D浅剖有着更多的接收和发射传感器,其震源(发射传感器)和水听器(接收传感器)呈平面阵的形式排列,中心为震源,环绕震源的为水听器,这种组合使得水听器可以接受各个方位的反射波,因此3D浅剖可以接受360°方位的回波信息,当震源发射声脉冲,各个水听器先后接收到反射波。如果说2D测量是水听器单个接受,连续走航,那么3D浅剖就相当于一次声脉冲激发,而得到相当于原来多个炮点位置的反射波。只需要接收和发射传感器的数目足够多,就可以展现海底真实3维地貌。
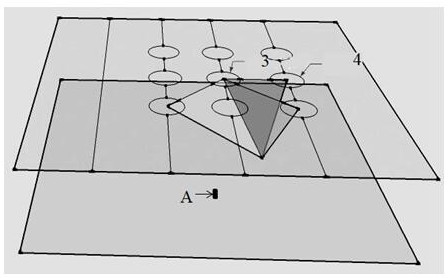
相比于2D测量,3D浅剖可以利用偏移距原理,来进行海底位置的交会定位。如图5所示,上平面代表水面,中心圆圈位置为震源3,环绕着的为水听器4。震源和水听器之间的位置已知,其相对位置关系保持不变。下平面代表海底,现探测海底一目标A(X,Y,Z),已知发射器位置(X0,Y0,Z0),水听器位置(X1,Y1,Z1)。声波在水体中传播的平均声速为V,发射到接受的总共时间为t1。在震源发射到水听器接收到反射波的过程中,根据目标点到震源和水听器的距离相同,可联立方程组:
(X-X
(X-X
R
公式中的未知数只有X,Y,Z,所以只要保证接收范围内,存在3个水听器以上,就可以求解X,Y,Z确定海底物体的具体位置,而且水听器越多,即保证多余观测,接收到的反射波越完整,数据质量越好,观测精度高。基于此种原理,解决了进行2D剖面测量时,不能分辨旅行时相同的反射波方位的缺陷,即“凹坑变浅”问题,采用处理软件对反射波数据进行解译,就可以图像化海底真实三维地貌。
可选的,本发明实施例的海洋浅地层剖面探测系统100中多水听器4为压电陶瓷水听器、压阻式水听器或者电阻式水听器。
可选的,本发明实施例的海洋浅地层剖面探测系统100中震源3为压电陶瓷震源、布默震源或者电火花震源。
需要说明的是,本发明实施例中水听器的线性区间与震源主频匹配。
另一方面,参见图5所示,本发明实施例还提供了一种海洋浅地层剖面探测方法,包括:
步骤200:震源向海洋浅地层发射声脉冲波;
步骤400:多个水听器接收从不同方位反射回的声脉冲波,并获取多个水听器的测量时刻和测量位置;
步骤600:根据多个水听器的测量时间和测量位置利用空间交汇算法确定探测目标物体的位置。
本发明实施例的海洋浅地层剖面探测方法将震源、排架式接收阵搭载在水面航行器上,通过单源、多源发射,多点高密度接收,有效提高测线密度,利用多余观测压制绕射,提高探测精度,通过空间交汇算法,实现海底高分辨力三维剖面探测及浅水区高精度水下埋藏不连续小目标探测,改善传统作业方法水下小目标探测浅水区施工难度大、风险高、效率低的问题。
在一些实施例中,参见图6所示,本发明的步骤600包括:
步骤601:根据每个水听器的测量时刻T
步骤602:根据每个水听器的测量位置SP
步骤603:根据边界条件在每个球体S
步骤604:重复创建K个集合C
步骤605:分别计算每个集合C
步骤606:根据局部期望E
步骤607:如果全局方差D满足预设条件,则判定全局期望E对应的位置为探测目标物体的位置。
在一些实施例中,参见图7所示,本发明的步骤602包括:
步骤6021:创建当前时刻的全局坐标系;
步骤6022:利用时空对准算法将每个水听器的测量位置SP
步骤6023:根据每个水听器的测量开角和球面表达式确定每个水听器对应的球面计算公式及参数取值;
步骤6024:建立每个水听器对应的球体S
根据本发明的另一实施方式,预设条件为全局方差D≤D
具体的算法流程为:(假设存在M个测量到同一个物标的水听器):
1、依据水听器测量开角、球面表达式确定每个水听器的球面计算公式及参数取值范围,其中球面表达式:
水听器开角如何得到θ和ψ,θ和ψ通过测量的时间计算的长度、水听器和发射换能器之间的距离计算获得。
2、依照每个水听器测量的距离值L
3、将第2步中的所有粒子看作是一个集合C
4、分别计算集合C
5、对粒子P
6、当全局方差D≤D
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本发明的保护之内。
- 海洋浅地层剖面探测系统及方法
- 一种基于海洋无人平台的水下目标探测系统及方法