一种电力放线用无人机
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及电力架线领域中的电力放线用无人机。
背景技术
在户外架线时,需要将线缆架于一个接一个的铁塔上,具体的架线过程如中国专利CN2018114109402背景技术中介绍的:先在一个个铁塔的横担上悬挂放线滑车,放线滑车包括左右布置的滑车侧壁和可拆连接于滑车侧壁上端的滑车横撑,两个滑车侧壁的下端转动装配有转动轴线沿左右方向延伸的放线滑轮。然后通过放线无人机进行放线,现有的放线无人机如四川省泛驾只能技术有限公司生产的专业电力架线无人机,该专业电力架线无人机为一个六轴电力放线无人机,其包括无人机机机架,无人机架上设置有六个旋翼轴,每个旋翼轴的上端均固定有旋翼,各旋翼轴均由各自对应的电动机带动而转动,通过旋翼的转动产生推力,通过改变不同旋翼之间的相对转速,可以改变单轴推进力的大小,从而控制无人机的运行轨迹。无人机机架上设置有放线导绳连接结构,使用时将与线缆相连的放线导绳与放线导绳连接结构相连,在放线结束后,放线导绳由放线导绳连接结构上卸下。
放线过程中,需要将与线缆相连的放线导绳由放线滑轮上侧的空间穿过,而现有技术中,由于放线滑轮、滑车侧壁和滑车横撑之间围成的空间比较小,现有的无人机的尺寸较大而无法从上述空间中通过,只能通过无人机将放线导绳按顺序拖至一个个铁塔的放线滑车的上方。然后工作人员攀爬至铁塔上,打开对应放线滑车的滑车横撑,手动将放线导绳置于放线滑轮、滑车侧壁和滑车横撑围成的空间内,当所有的放线导绳均处于对应放线滑轮上侧后,通过牵引机对放线导绳的端头牵引,放线导绳尾端连接的线缆沿着牵引方向前移动,并顺序经过各铁塔的放线滑轮上,最后将线缆连接于铁塔上的联板上。也就是说,现有技术中:由于无人机不能直接通过放线滑轮、滑车侧壁和滑车横撑所围成的空间,必须先将放线导绳置于整个放线滑车的上侧,然后通过人工手动将放线导绳置于放线滑轮、滑车侧壁和滑车横撑所围成的空间内,人工操作这个过程,是在铁塔上,属于高空作业,不仅劳动强度大,也非常的危险。
发明内容
本发明的目的在于提供一种电力放线用无人机,以解决现有技术中放线无人机无法顺利通过放线滑车而导致需要人工手动将放线导绳穿过放线滑车费时费力的技术问题。
为解决上述技术问题,本发明中的技术方案如下:
一种电力放线用无人机, 包括第一旋翼、第二旋翼、第三旋翼和第四旋翼,第一旋翼、第三旋翼的旋向相同,无人机还包括基座和转动装配于基座上的工作台,基座与工作台之间设置有驱动工作台转动的工作台驱动机构,工作台的相对两侧转动装配有第一转动结构和第二转动结构,第一转动结构、第二转动结构的轴线与工作台的轴线并列布置,第一旋翼通过第一架臂安装于第一转动结构上,第二旋翼通过第二架臂安装于第二转动结构上,第三旋翼通过第三架臂安装于第二转动结构上,第四旋翼通过第四架臂安装于第一转动结构上,无人机还包括用于在工作台由常态飞行位到穿线飞行位转换时,保持各支臂姿态的姿态保持机构,工作台转动过程中具有使第一旋翼、第二旋翼左右布置,第四旋翼、第三旋翼左右布置,且第一旋翼、第二旋翼并列布置于第三旋翼、第四旋翼前侧的常态飞行位,工作台转动过程中还有使第一旋翼、第二旋翼、第四旋翼、第三旋翼沿前后方向顺序布置而使无人机通过放线滑车框架内的穿线飞行位。
所述工作台驱动机构包括能够无线遥控操作的工作台驱动电机。
工作台转动九十度实现由常态飞行位到穿线飞行位的姿态变化。
姿态保持机构包括设置于工作台与第一转动结构之间的第一转动结构驱动电机,姿态保持机构还包括设置于工作台与第二转动结构之间的第二转动结构驱动电机。
姿态保持机构包括固定于基座上的传动齿圈,第一转动结构、第二转动结构上设置有于传动齿圈咬合传动的传动齿轮以在工作台转动时保持对应支臂姿态不变。
工作台处于穿线飞行位时,第一旋翼、第二旋翼、第四旋翼和第三旋翼沿前后方向呈一字形排列。
第一架臂具有朝向右侧的第一架臂凹口,第一架臂凹口用于穿线飞行位时容纳避让第二旋翼。
第二架臂后端具有朝向左侧的第二架臂凹口,第二架臂凹口用于穿线飞行位时避让基座。
第三架臂具有朝向左侧的第三架臂凹口,第三架臂凹口用于穿线飞行位时容纳避让第四旋翼。
第三架臂前端具有朝向右侧的第四架臂凹口,第三架臂凹口用于穿线飞行位时避让基座。
本发明的有益效果为:本发明中在正常使用时,工作台处于常态飞行位,第一旋翼、第二旋翼左右布置,第四旋翼、第三旋翼左右布置,且第一旋翼、第二旋翼并列布置于第三旋翼、第四旋翼前侧,四个旋翼保持无人机的正常飞行,待牵引的放线导绳则连接于基座上,此时第一旋翼、第二旋翼占用的横向空间较大,不能从放线滑车的空间内通过,当无人机飞行至放线滑车后侧时,工作台转动至穿线飞行位,此时第一旋翼、第二旋翼、第四旋翼、第三旋翼沿前后方向顺序布置,整个无人机的宽度变窄,从而可以顺利的带着放线导绳穿过放线滑车。
附图说明
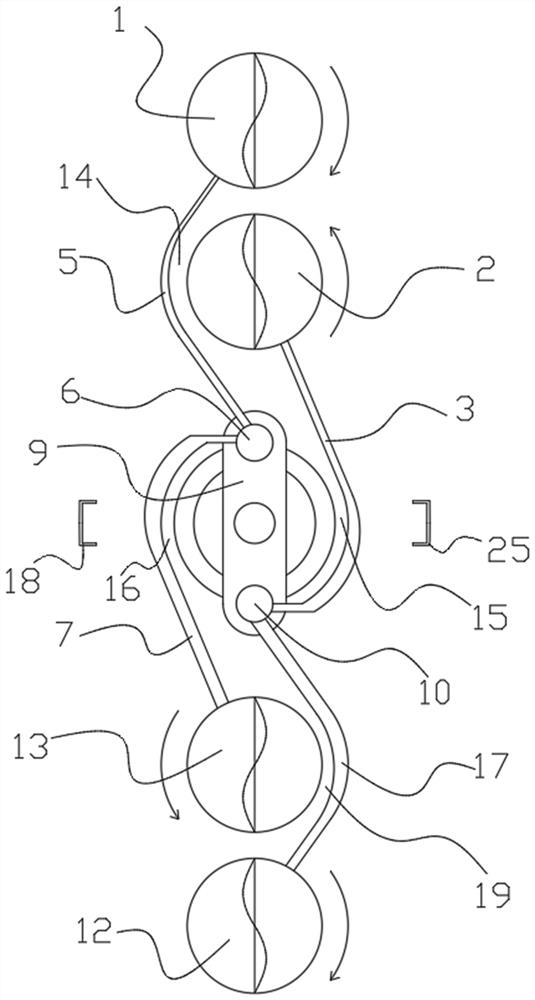
图1是本发明中工作台处于常态飞行位时的无人机的结构示意图;
图2是本发明中工作台处于穿线飞行位时的无人机的结构示意图;
图3是图工作台在常态飞行位与穿线飞行位之间的变化过程图。
具体实施方式
本发明中电力放线用无人机的实施例如图1~3所示:本发明中的无人机为四旋翼无人机,其包括旋向相同的第一旋翼1、第三旋翼12,旋向相同的第二旋翼2和第四旋翼13,第一旋翼1与第二旋翼2的旋向相反。(图中箭头表示对应旋翼的旋转方向)
无人机还包括基座和转动装配于基座上的工作台,基座与工作台之间设置有驱动工作台转动的工作台驱动机构,工作台驱动机构包括能够无线遥控操作的工作台驱动电机,本实施例中基座包括圆筒形的外壳20,工作台包括与基座转动配合的工作台转轴4和固定于工作台转轴4上端的工作台横杆9,工作台转轴的轴线沿上下方向延伸设置。
工作台横杆9的两端分别转动装配有第一转动结构6和第二转动结构10,第一转动结构6、第二转动结构10为轴线沿上下方向延伸的转轴结构,第一转动结构、第二转动结构的轴线与工作台的轴线并列布置。第一旋翼1通过第一架臂5安装于第一转动结构6上,第二旋翼2通过第二架臂3安装于第二转动结构上,第三旋翼12通过第三架臂17安装于第二转动结构10上,第四旋翼13通过第四架臂7安装于第一转动结构6上。工作台与第一转动结构、第二转动结构之间分别设置有转动结构驱动机构,本实施例中,工作台与第一转动结构之间的转动结构驱动机构为第一转动结构驱动电机,工作台与第二转动结构之间的转动结构驱动机构为第二转动结构驱动电机,第一转动结构驱动电机、第二转动结构驱动电机构成用于保持各架臂姿态的姿态保持机构。
工作台转动过程中具有使第一旋翼、第二旋翼左右布置,第四旋翼、第三旋翼左右布置,且第一旋翼、第二旋翼并列布置于第三旋翼、第四旋翼前侧的常态飞行位,工作台转动过程中还有使第一旋翼、第二旋翼、第四旋翼、第三旋翼沿前后方向顺序布置而使无人机通过放线滑车框架内的穿线飞行位,在穿线飞行位时,第一旋翼、第四旋翼之间的间距与第二旋翼、第三旋翼之间的间距相同,对机身产生的扭力与力矩的合成为零。工作台转动九十度实现由常态飞行位到穿线飞行位的姿态变化。工作台处于穿线飞行位时,第一旋翼、第二旋翼、第四旋翼和第三旋翼沿前后方向呈一字形排列。第一架臂具有朝向右侧的第一架臂凹口14,第一架臂凹口用于穿线飞行位时容纳避让第二旋翼2;第二架臂后端具有朝向左侧的第二架臂凹口15,第二架臂凹口用于穿线飞行位时避让基座;第三架臂具有朝向左侧的第三架臂凹口19,第三架臂凹口用于穿线飞行位时容纳避让第四旋翼13;第三架臂前端具有朝向右侧的第四架臂凹口16,第四架臂凹口16用于穿线分析为时避让基座。
在使用时,操作人员在地面操作遥控器,四个旋翼由对应的旋翼电机驱动,遥控器控制四个旋翼的转速、启动和停止,遥控器还能够控制第一转动结构驱动电机、第二转动结构驱动电机的转速、启动和停止;遥控器还能够控制工作台驱动电机的转速、启动和停止。外壳内设置有向旋翼电机、第一转动结构驱动电机、第二转动结构驱动电机和工作台驱动电机供电的锂电池。
使用时,将待牵引的放线导绳连接于基座上,如图1所示,工作台处于常态飞行位时,第一旋翼、第三旋翼对角布置,第二旋翼、第四旋翼对角布置,无人机可以稳定的飞行,当无人机飞行至放线滑车后侧时,由于放线滑车的左侧滑车侧壁18与右侧滑车侧壁25之间的间距有限,因此工作台驱动电机带动工作台旋转九十度,同时第一转动结构驱动电机、第二转动结构驱动电机带动第一转动结构、第二转动结构相对工作台转动,保持第一支臂、第二支臂、第三支臂和第四支臂的姿态,使得形成图2状态,第一旋翼、第二旋翼、第四旋翼和第三旋翼形成沿前后方向一字形排布的纵列式旋翼布局,其各支臂对旋翼产生的气流不造成阻挡,减小无人机的宽度尺寸,使得无人机可以顺利通过放线滑车的内部空间,进而放线导绳可以顺利通过放线滑车的内部空间,在纵列式旋翼布局时,也可以仅有两个旋翼工作,在无人机通过放线滑车后,无人机重新调整至常态飞行位,飞向下一个铁塔,常态飞行位飞行稳定,利用长时间飞行,纵列旋翼布局的穿线飞行位用于穿过放线滑车,从而实现不需要操作人员爬铁塔手动操作就可以实现将牵引导绳穿过放线滑车。
在本发明的其它实施例中:第一支臂、第二支臂、第三支臂和第四支臂也可以是直支臂,此时在穿线飞行位时,第一支臂可以位于第二旋翼的下侧,以对第二旋翼进行避让,第二支臂可以位于基座的上侧以对基座进行避让;转动结构驱动机构还可以不设,此时,基座上固定设置有传动齿圈,第一转动结构、第二转动结构上设置有于传动齿圈咬合传动的传动齿轮以在工作台转动时保持对应支臂姿态不变,当工作台转动时,基座通过传动齿圈带动对应的传动齿轮转动,保证各至臂的姿态保持不变。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种电力放线多旋翼无人机及电力放线方法
- 一种电力放线用无人机