基于无人船的深度可调的多功能浮游生物定量采集装置
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及浮游生物监测与评价技术领域,具体为一种基于无人船的深度可调的多功能浮游生物定量采集装置。
背景技术
浮游生物包括浮游动物和浮游植物,是水体环境质量、生态系统健康程度、营养状态和水质评价的重要指示生物。河湖或水库水体水质和浮游生物群落结构特征随水深增加,往往表现出明显的垂直变化,对水体表层、上层、中层、下层进行分层采样与水质检测和浮游生物群落结构评价,是河湖或水库水环境质量评价与水体治理修复的重要内容。
当前,采集浮游生物所用到的装置包括浮游生物网、活塞机械或水泵。采集不同类群和大小的浮游生物,浮游生物网的规格和网孔径不同,需要使用多个规格浮游生物网才能完成现场样品采集,时间成本和人力成本较高。由于浮游生物网手持杆长度的限制,难以对离岸较远大水域进行深水区垂向分层采样,加之,浮游生物网覆盖范围有限及灵活性不够,难以代表水体浮游生物横向和垂向空间异质性分布格局,可能会显著影响检测结果。活塞机械或水泵虽然可多层采样,但在采样时会对浮游生物、水层造成扰动乃至损害,且难以解决河湖或水库水体离岸较远水域采样难的问题,难以全面反映水体中浮游生物群落结构特征及其垂向变化规律。当前,缺乏一种深度可调的、采集范围较为灵活的,并可同时定量采集浮游动物和浮游植物的装置。
发明内容
本发明要解决的技术问题是提供一种基于无人船的深度可调的多功能浮游生物定量采集装置。
为解决以上问题,本发明的具体技术方案如下:一种基于无人船的深度可调的多功能浮游生物定量采集装置,包括带有控制结构的无人船本体,无人船本体上安装有驱动结构和浮游生物采集结构,驱动结构安装在无人船本体的后端部并提供动力,驱动无人船本体移动;浮游生物采集结构包括采集框体、浮游生物滤网、缆绳收放机构、刚性伸缩管、缆绳和储水箱,所述刚性伸缩管垂直向下安装于无人船本体底部,为伸缩结构,沿纵向上下收缩,刚性伸缩管下部焊接有浮游生物采集框体及重力锤,刚性伸缩管内部安装有缆绳、电磁流量感应器配线和电磁开关配线,三线通过捆绑绳固定在一起,使捆绑绳依靠重力及内部缆绳的牵引力进行上下伸缩,缆绳通过缆绳收放机构控制收放。
所述的无人船体上设有支架,支架位置与缆绳收放机构位置对应,支架拐角处通过支杆连接有定滑轮,缆绳绕过定滑轮,定滑轮上设有刻度盘。
所述的缆绳包括相对的首端和尾端,首端伸入至刚性伸缩管中并贯穿整个刚性伸缩管,尾端卷绕在缆绳收放机构的转轴外圆周,通过收放缆绳带动刚性伸缩管的上下移动。
所述的驱动结构包括电池、发动机和螺旋桨。
所述的刚性伸缩管由若干个首尾相连的刚性管单体组成,且相邻的两个刚性管道单体之间相互嵌套,材质为刚性不锈钢管。
所述的储水箱四周为密闭结构,上部设有进水口,进水口处设有翻转板,翻转板通过电磁开关控制开合,储水箱底部与所述采集框体贯通,储水箱与采集框体之间设有初滤网,进水口安装有一进水调节头,进水调节头上设有止水阀II。
所述的浮游生物滤网放置于采集框体内部,包括采集网Ⅰ和采集网Ⅱ,初滤网、采集网Ⅰ和采集网Ⅱ通过环形卡箍固定于采集框体上,卡箍环形状为长方形,大小与采集框体大小对应。
所述的采集网Ⅰ为13#网,采集网Ⅱ为25#网,所述采集网Ⅰ下部连接样瓶Ⅰ,二者之间设有止水阀Ⅰ,所述采集网Ⅱ下部连接样瓶Ⅱ,二者之间设有止水阀Ⅱ,采集框体外部设置保护结构。
所述的刻度盘与定滑轮的定轴相连。
所述的翻转板包括连接杆II,连接杆II尾端连接有电磁开关和配重块,连接杆II另一端连接有连接杆I,二者之间呈钝角,开口方向朝向储水箱,连接杆I的另一端连接有圆形板,圆形板直径大于进水口。
本发明带来的有益效果为:通过改变无人船本体的位置及底部刚性伸缩管的长度来改变浮游生物采样位置及水层深度,浮游动物与浮游植物可同时采集,打破岸边采样的局限,解决采样范围窄、深度浅,样品具有一定的偶然性,采样人员安全性差,多人次采样人员反复操作等问题。
附图说明
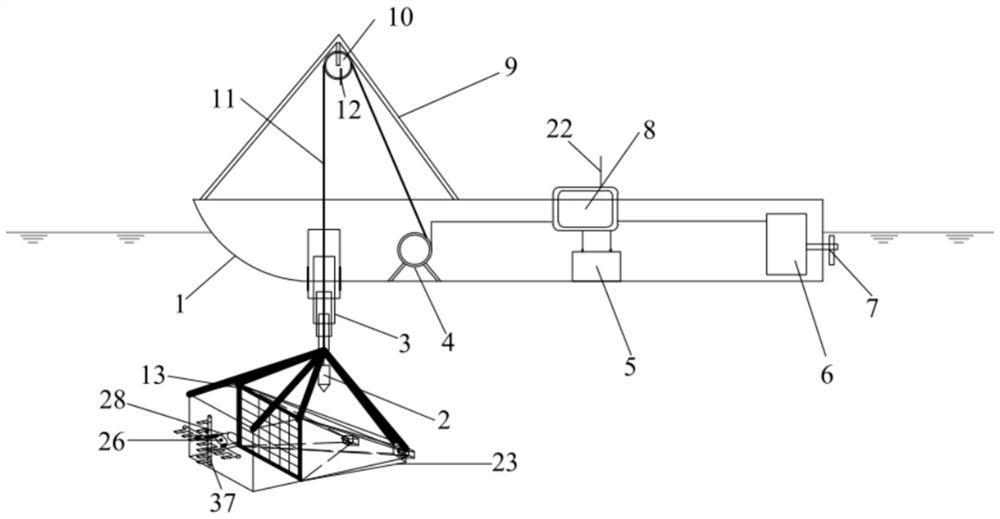
图1为本发明采集装置的结构示意图;
图2为本发明的浮游生物采集结构示意图;
图3为本发明的翻转板示意图;
图4为本发明的卡箍环示意图;
图5为本发明的初滤网示意图;
图6为本发明伸缩管内部结构图;
图7进水调节头俯视图;
图8为本发明采样实施流程图。
图中:1-无人船本体;2-重力锤;3-刚性伸缩管;4-缆绳收放机构;5-电池;6-发动机;7-螺旋桨;8-控制结构;9-支架;10-定滑轮;11-缆绳;11-1-首端;11-2-尾端;12-刻度盘;13-采集框体;14-初滤网;15-卡箍环;16-采集网Ⅰ;17-采集网Ⅱ;18-止水阀Ⅰ;19-样瓶Ⅰ;20-止水阀Ⅱ;21-样瓶Ⅱ;22-天线;23-保护结构;24-储水箱;25-螺纹;26-进水口;27-电磁开关;28-电磁流量感应器;29-配重块;30-连接杆Ⅱ;31-连接杆Ⅰ;32-圆形板;33-翻转板;34-捆绑绳;35-电磁流量感应器配线;36-电磁开关配线;37-进水调节头;38-止水阀III。
具体实施方式
本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
为了更好的理解本发明的技术方案,下面结合附图1-8详细描述本发明提供的实施例。
无人船是通过设定路线,借助卫星定位系统,惯性导航、智能避障系统,自主航行或人工远程控制的“水面机器人”。无人船可以不受天气因素干扰,替代人工完成不同的水上任务,并将数据、图像信息实时回传,使得水上任务更高效、更安全。
一种基于无人船的深度可调的多功能浮游生物定量采集装置,该装置主要由带有控制结构8的无人船本体1、驱动结构和浮游生物采集结构组成。驱动结构安装在无人船本体1的后端部并提供动力,驱动无人船本体1移动。所述驱动结构包括电池5、发动机6和螺旋桨7。浮游生物采集结构包括采集框体13、浮游生物滤网、缆绳收放机构4、刚性伸缩管3、缆绳11和储水箱24,所述刚性伸缩管3设置于无人船本体1前部,为伸缩结构,沿纵向上下收缩。刚性伸缩管3由若干个首尾相连的刚性管单体组成,且相邻的两个刚性管道单体之间相互嵌套,材质为刚性不锈钢管,保证采样器不被水体较大的流速作用而偏离。刚性伸缩管3垂直向下安装于无人船本体1下部,刚性伸缩管3下部焊接有浮游生物采集框体13及重力锤2,刚性伸缩管3内部安装有缆绳11、电磁流量感应器配线35和电磁开关配线36,三线通过捆绑绳34固定在一起,使捆绑绳34能依靠重力及内部缆绳11的牵引力进行上下伸缩。
缆绳11包括相对的首端11-1和尾端11-2,首端11-1伸入至刚性伸缩管3中并贯穿整个刚性伸缩管3,尾端11-2卷绕在缆绳收放机构4的转轴外圆周,并通过收放缆绳11实现刚性伸缩管3的上下移动。为确保刚性伸缩管3能够下放至采样设定深度,缆绳11和重力锤2共同作用,可实现采集框体13在任意深度的浮游生物采取。
无人船体1上设有支架9,支架9位置与缆绳收放机构4位置对应,支架9拐角处通过支杆连接有定滑轮10,缆绳11绕过定滑轮10,且定滑轮10设有用于计算通过缆绳11长度的刻度盘12,如图1,刻度盘12置于定滑轮10外部并与定滑轮10的定轴相连,刻度盘12初始值所对的定滑轮10部位做一标记,标记每经过刻度盘12初始值时记为一周,记录标记通过刻度盘12初始值的次数或相应数值快速确定采集框体13位于的水体深度,实现精准层次的浮游生物采集。
通过无人船本身携带的控制结构8实现无人船本体1定位、动力提供、电磁流量感应器和电磁开关控制等功能。具体地,GPS定位装置通过仪表传输的数据,修正因外界不良因素引起的无人船路线偏移的问题,使无人船稳定到达采样点,这对于大水域范围内浮游生物采集的定点非常关键,最终GPS定位数据可通过天线22传输到岸上的信息接收终端。电磁开关27控制翻转板33的闭合状态,电磁流量感应器28将感应电压进行转换,最后示数显示。
初滤网14上方设置储水箱24,储水箱24四周密闭,上部有一圆形进水口26,底部不封底,使其与所述采集框体13保持贯通。进水口26安装有一进水调节头37。在采样前期,可根据采样纵向面宽、横向面宽要求,调节所述进水调节头37上的止水阀II38,控制采水范围。储水箱24底部四周设有螺纹,可与卡箍环15进行连接,保证装置的密封性。采集框体13进水首端覆盖有初滤网14,用于截留水体中大直径悬浮污染物,以减少对样品采集所带来的不利影响。采集框体13内部设有相隔一段距离的Ⅰ号采集网16和Ⅱ号采集网17。初滤网14、Ⅰ号采集网16和Ⅱ号采集网17通过环形卡箍15固定于采集框体13上,卡箍环15形状为长方形,大小与框体首部大小配套。可提高所述初滤网14、Ⅰ号采集网16和Ⅱ号采集网17被固定的稳定性,对采集网和采集框体13之间的连接性能和密闭性能具有极大的提升。本发明浮游生物采集部分,通过设置Ⅰ号采集网16和Ⅱ号采集网17的不同孔径,所述Ⅰ号采集网16选用13#网,用于采集浮游动物;Ⅱ号采集网17采用25#网,用于采集浮游植物。所述Ⅰ号采集网16下部经Ⅰ号止水阀18连接Ⅰ号样瓶19,所述Ⅱ号采集网17下部经Ⅱ号止水阀20连接Ⅱ号样瓶21,来完成浮游动物和浮游植物的一体化采集工作。整个采集框体13外部与内部采集网留有一定距离的设置保护结构23,保护结构上均匀布置一定数量一定孔径的孔隙,一是方便过滤后的水体进行排放,二是对整个网体结构进行保护。
工作前,首先将刻度盘12校准到0m水深,然后通过岸上信息接收端将无人船本体移动至采样点,到达后,为使无人船本体一直保持在指定位置,应开启自动定位功能。采样时,先确定水体总深度,具体操作如下:通过缆绳收放机构4将整个浮游生物采集模板放至河底,此时电磁开关27应保持通电状态,使翻转板闭合,进水调节头37上的止水阀II38全部封闭,此时储水箱24应密闭,淹没进水,当观察发现刻度盘12不再转动时,认为此时整个采样装置已到达水体底部,此时通过计算缆绳长度来推求该水体最大深度。然后根据采样具体深度与采样横纵向范围,在岸上调节好进水调节头37上的止水阀II38,再次启动缆绳收放机构4,电磁开关27继续保持通电状态,使翻转板33闭合,此时储水箱24应闭合,未进水,防止其他水层对最终采样结果造成影响,观察定滑轮10上的刻度盘12,将采集框体13放置于设定的采样深度,此时采集框体13应浸没于水体中,此时电磁开关27断电,使翻转板33打开,无人船驱动带动整个浮游生物采集结构以一定速度前进,此时水样开始进入储水箱24,依次通过电磁流量感应器28、初滤网14、两层网衣,滤去多余的水分,进行浮游生物的采集工作。打开所述Ⅰ号止水阀18和Ⅱ号止水阀20,将最终滤得的浮游动物和浮游植物样品分别导入Ⅰ号样瓶19和Ⅱ号样瓶21中,贴上标签,加入甲醛或鲁格氏液进行固定、染色,带回实验室,完成浮游生物的采集工作。网衣结构在采样结束后可拆卸进行清洗,方便下次采样使用。
上面结合附图对本发明的实施方式作了详细说明,但是本发明不限于上述实施方式,在所述技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
- 基于无人船的深度可调的多功能浮游生物定量采集装置
- 深度可调的水质监测、浮游生物定量分层采样装置及其方法