一种全路段组网交通雷达多目标探测系统
文献发布时间:2023-06-19 09:23:00
技术领域
本发明属于远距交通毫米波雷达技术领域,具体涉及一种全路段组网交通雷达多目标探测系统。
背景技术
Smartmicro公司的UMRR-0C是当今最高性能的交通雷达,它具有宽达100度的波束覆盖区域,同时可达250米(小车)或340米(卡车)探测距离,可以覆盖多达8车道。可同时提供(X,Y,Z)笛卡尔坐标或极坐标距离,方位角,仰角以及速度矢量,最多可同时处理256个目标。
慧尔视公司广域雷达微波检测器采用二维主动扫描式阵列雷达微波检测技术,可探测200米,能同时检测至少8个车道;可同时跟踪检测多达128个目标;可跟踪检测每个目标的位置坐标(x,y)、速度(Vx,Vy)、车型分类,具有图形化操作软件,实时显示每个目标在检测区域内被跟踪情况以及车辆即时位置、速度、车辆长度等实时信息。
现有交通雷达探测系统中单个系统的雷达探测距离范围在200m以内。单个系统覆盖范围小,对于远距离的目标的探测需要通过级联多个系统实现,系统数量与安装成本随之增加。本发明所解决的问题之一在于扩大单个系统覆盖范围,减少成本。
现有交通雷达探测系统采用24G毫米波信号,然而24GHz频段缺少宽带宽,无法满足高性能需求。本发明中的77G毫米波信号使用宽带宽信号以及更高的射频频率,与24G传感器对比具有以下优势:(1)77GHz的SRR频段可提供4GHz带宽,提高距离分辨率与精度,满足短距离情况下高分辨率的需求。(2)77GHz传感器通过增大射频信号频率提高速度分辨率。(3)77GHz传感器发射更高的射频频率,传感器尺寸更小,更易于安装。
现有交通雷达探测系统中不免存在盲区,在盲区内无法得到目标得实际位置以及速度等信息,只能通过跟踪算法输出估计值。因此本发明要解决的问题还包括如何减小探测盲区扩大雷达波束覆盖范围。
现有的组网雷达探测系统由于使用多个传感器,并且多个雷达传感器间存在重复覆盖区域。当目标出现在重复覆盖区域时将被多个传感器探测,此时容易产生的同一目标ID不一致的情况。因此本发明的难点之一包括对组网雷达系统中多个雷达传感器的多条航迹进行关联与融合,从而保证在长距范围内目标ID不变,航迹唯一。
发明内容
有鉴于此,本发明的目的是提供一种全路段组网交通雷达多目标探测系统,可以实现对通行道路车辆、行人运行轨迹进行实时稳定跟踪。
一种全路段组网交通雷达多目标探测系统,包括两个远距雷达、多个近距雷达以及边缘处理平台;所述两个远距雷达分别负责对前向与后向的25m~550m范围内目标进行探测;所述近距雷达负责对距离在50m、角度为360°范围内目标进行探测;所述边缘处理平台接收来自远距雷达和近距雷达发送的目标信息,对同一个目标的目标航迹进行关联,最后得到融合后的目标航迹。
较佳的,远距雷达和近距雷达对目标进行跟踪,具体为:
S81、导入设定的目标加速度极大值a
S82、假设目标加速度符合修正的瑞利分布,计算得到加速度方差为:
其中
其中
S83、计算卡尔曼增益:K=P
S84、计算滤波的预测值X
S85、将k+1时刻的测量值Z
较佳的,近距雷达确定目标的三维信息以及目标速度后,通过DBscan算法对目标点进行聚类,由此获得各个目标;并提取目标轮廓,并通过雷达方程测算出该目标点对应的RCS,保存该目标点的一维距离像,并提取距离像波形熵特征、中心矩特征以及目标长度特征,再计算接收信噪比SNR。
较佳的,远距雷达确定目标的三维信息以及目标速度后,通过DBscan算法对目标点进行聚类,由此获得各个目标。
本发明具有如下有益效果:
本发明的一种全路段组网交通雷达多目标探测系统,两个远距雷达分别负责对前向与后向的25m~550m范围内目标进行探测;近距雷达负责对距离在50m、角度为360°范围内目标进行探测;所述边缘处理平台接收来自远距雷达和近距雷达发送的目标信息,对同一个目标的目标航迹进行关联,最后得到融合后的目标航迹,采用无缝隙组网,可实现1000m全路段范围内,对8车道以及应急车道的车辆、行人速度、类型、位置等信息进行实时监测;采用改进的当前统计模型与卡尔曼滤波算法进行目标跟踪,对通行道路车辆、行人运行轨迹进行实时稳定跟踪。
附图说明
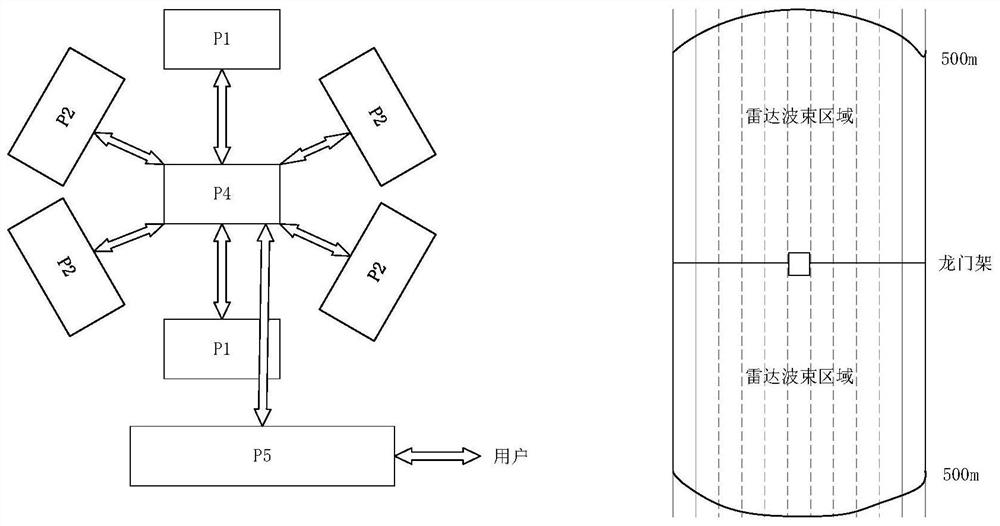
图1为路中安装雷达连接方案图;
图2为路侧安装雷达连接方案图;
图3为雷达波束侧视图;
图4为雷达信号处理流程图。
具体实施方式
下面结合附图并举实施例,对本发明进行详细描述。
本发明所提供的探测系统由2个远距雷达P1、多个近距雷达P2以及1个边缘处理平台P4组成。安装形式可选择路中安装或者路侧安装,路中安装通过顶装专用工装固定在龙门架上,路测安装通过侧装专用工装固定在杆子上,然后通过交通雷达综合管控软件P5与用户交互。路中安装方案如图1所示,路侧安装方案如图2所示,其中左侧为的雷达安装位置,右侧为波束覆盖范围图。
本发明主要包括以下模块:远距雷达模块、补盲雷达模块以及边缘计算节点模块。其中远距雷达模块与补盲雷达模块的毫米波雷达通过网口与边缘计算节点相连,边缘计算节点可通过网口/串口,5G/4G网络传输等多种连接方式与交通雷达综合管控软件进行通信,以实现多源数据的有效汇总传输。
远距雷达模块包含两个远距雷达,远距雷达发射信号为窄波束信号,利用窄波束信号功率集中、传播距离远的特性实现长距探测,每个远距雷达波束覆盖范围为前后25m~550m。本发明使用两个远距雷达分别负责前向与后向,使单个雷达系统探测范围达到1000m。在大场景远距离的应用中,需要通过级联多个系统覆盖全路段范围,本发明提供的雷达系统在同等探测范围内可减少雷达系统需求量,与雷达系统配套的摄像头以及安装设备等设施从而节省成本。由于采用两个远距雷达结合的方式实现1000m范围探测,雷达近距处不免存在盲区,后续将使用补盲雷达模块覆盖该盲区。补盲雷达模块包含多个近距雷达,近距雷达发射宽波束信号以实现近距离宽范围探测,每个雷达波束覆盖范围为0~50m。补盲雷达个数、波束宽度以及安装角度需根据雷达具体安装形式设置,如路中安装时,可使用四个近距雷达,并分别安装于左前、右前、左后、右后四个方向,用于补偿远距雷达存在的探测盲区。此时,要求雷达补盲雷达波束宽度大于90度以实现盲区的360度全覆盖。并且需设计雷达波束俯仰角度以到达补盲雷达所需的探测范围。如图3所示,其中Max1为远距雷达最大探测距离,Min1为远距雷达最小探测距离,Max2为近距补盲雷达最大探测距离,Min2为近距补肓雷达最小探测距离,β为补盲雷达的波束俯仰角,H为高度。确定补盲雷达探测范围使其满足:
Min2<Min1<Max2
从而,β可由下式计算而得:
当Min2=0时,可实现雷达波束全范围无盲区覆盖。
远距雷达与近距雷达均具备以下功能(1)自检与周期自检功能、具有安全性保护措施;(2)具有透明传输通道功能;(3)具有航迹信息融合功能;(4)具有触发功能、统计功能、事件检测功能;(5)具有RTC时钟功能;(6)具有程序在线更新功能。毫米波雷达通过对回波信号进行数字处理,可以得到目标的三维信息以及目标速度。并将多个时间点的测量结果通过跟踪技术进行目标跟踪。完成上述处理后,将周期性测量结果送至边缘计算节点模块。
边缘计算节点模块具有以下功能:(1)边缘计算处理平台作为上位机与雷达通信的枢纽,电源及通信信号均需通过边缘计算处理平台传输。最多可接8个雷达。(2)具有自检与周期自检功能、具有安全性保护措施。(3)具有透明传输通道功能。(4)具有航迹信息融合功能,汇总各个雷达的数据,实现多雷达的目标融合,实现目标ID唯一输出。(5)具有触发功能、统计功能、事件检测功能。(6)具有RTC时钟功能。(7)具有程序在线更新功能。(8)具有输出TTL电平的功能。最多24个IO口。(9)多雷达间目标同步功能。(10)支持5G(移动、联通,电信)网络传输,兼容4G(移动、联通、电信)。该模块接收来自远距雷达、补盲雷达发送的数据信息,首先将与远距雷达、补盲雷达进行空间对齐与时间同步;然后通过航迹关联确定来自不同传感器之间的目标航迹关系,最后采用航迹融合算法得到融合后的目标航迹。
本发明通过有效的技术手段实现道路交通状态信息的识别和采集,可应用于多种场景:1)高速公路车辆实时动态跟踪;2)城市路段交通状态监测;3)辅助智慧交通管理决策分析;4)隧道导航增强等等。
步骤一:雷达程序加载,完成参数初始化与参数设置。
步骤二:毫米波雷达向辐射区域周期性发射77G调频连续波信号,并接收由障碍物反射的回波信号。
步骤三:回波信号与发射信号进行混频,形成中频信号,中频信号通过ADC采样转换为数字信号。
步骤四:单个脉冲数字信号经过数字处理(加窗、傅里叶变换)得到压缩目标,完成目标在距离维的相参。
步骤五:多个脉冲信号通过二维傅里叶变换得到目标速度信息,再通过CFAR检测算法确定目标。
步骤六:多个天线接收的目标信号进行角度测量可得到目标方位角与俯仰角信息。
步骤七:
补盲雷达:完成上述步骤后,已经可以初步确定目标的三维信息以及目标速度。通过DBscan算法对目标点进行聚类,通过每一类中选择peakVal最大值作为该类所有点的聚类点,由此获得各个目标。当聚类点目标距离等于rConst时,通过聚类结果计算yMax-yMin=ySize,xMax-xMin=xSize从而提取目标轮廓,并通过雷达方程测算出该目标点对应的RCS,保存该目标点dopplerIdx的一维距离像rangeProfile,并提取距离像波形熵特征、中心矩特征以及目标长度特征。
式中SNR为接收信噪比,P
长距雷达:通过DBscan算法对目标点进行聚类,同时通过每一类中选择peakVal最大值作为该类所有点的聚类点输出,由此获得各个目标。
步骤八:补盲雷达和长距雷达利用多帧数据,采用改进的当前统计模型与卡尔曼滤波算法进行目标跟踪,具体为:
S82、选择运动模型:假设目标加速度符合修正的瑞利分布,计算得到加速度方差为:
其中
其中
S83、初始化目标检测点,计算卡尔曼增益:K=P
S84、计算滤波的预测值X
S85、数据关联,将k+1时刻的测量值Z
步骤九:将目标航迹以及当前目标的距离、速度、角度等信息发送至边缘计算节点模块。补盲雷达还需将目标航迹对应的目标轮廓与RCS同步上传至边缘节计算节点模块。
S91、边缘计算节点接收来自远距雷达与近距雷达的目标数据,通过安装角度进行雷达坐标系变换实现目标空间对齐,通过帧号frameIdx进行时间同步;
S92、由目标航向将长距雷达与补盲雷达分为目标前向与目标后向雷达。首先在波形重复覆盖区域进行目标关联,通过目标起始点与终止点信息(位置坐标、速度、加速度以及航向)进行目标航迹粗关联,距离最近的航迹选为关联对,对于目标粗关联成功的两条航迹之间通过基于小波框架和多尺度变换判断航迹姿态与形状相似度。对航迹的局部细节特征需满足以下小波系数向量判别准则的目标航迹判决为关联成功:
其中n是小波系数序列长度,WT
S93、同一目标的两条航迹完成航迹关联后,可采用基于融合误差均方差矩阵迹最小的方法进行航迹融合从而稳定航迹。
式中P
X
根据雷达的空间分布,航迹融合的顺序为先进行前向雷达与补盲雷达的轨迹融合,再进行补盲雷达航迹融合,最后是补盲雷达与后向远距雷达轨迹融合;
S94、完成上述步骤后,能够在单个系统1000m探测范围内实现目标ID唯一。对于多个系统级联情况,需将目标信息(位置、速度、航迹以及补盲雷达的测算得到固定距离下目标的特征信息传输至相邻系统。在目标粗关联后,将目标特征信息xSize,ySize以及RCS与距离像波形熵特征、中心矩特征以及目标长度特征作为输入参数,通过SVM训练得到不同系统中的目标分类结果,然后通过步骤2、3中算法进行航迹关联与融合从而实现全路段范围内目标的ID唯一;
S95、完成上述处理后,边缘计算节点模块将进行触发检测、统计检测以及事件检测,最后将数据传送至交通雷达综合管控软件P5与并由P5与用户进行交互。
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种全路段组网交通雷达多目标探测系统
- 一种基于编码和相控阵天线的多目标生命体征雷达探测系统