施工机械
文献发布时间:2023-06-19 10:14:56
技术领域
本发明涉及一种具备起重磁铁的施工机械。
背景技术
以往,已知有具备起重磁铁的施工机械(参考专利文献1。)。该施工机械具有设置于操纵室内的显示装置。显示装置以显示与尿素水余量相关的信息的方式构成。
现有技术文献
专利文献
专利文献1:国际公开第2016/076271号
发明内容
发明要解决的技术课题
然而,上述施工机械在显示装置中不显示与使用起重磁铁吊起的物体相关的信息。
因此,施工机械的操作人员有可能会无法识别使用起重磁铁吊起的物体的重量。
鉴于上述情况,希望提供一种能够使操作人员识别使用起重磁铁吊起的物体的重量的施工机械。
用于解决技术课题的手段
本发明的实施方式所涉及的施工机械具有:下部行走体;上部回转体,经由回转机构搭载于所述下部行走体;附属装置,安装于所述上部回转体;起重磁铁,安装于所述附属装置;控制装置,计算通过所述起重磁铁吊起的物体的重量;及显示装置,显示所述控制装置计算出的所述物体的重量。
发明的效果
通过上述方案,能够提供一种能够使操作人员识别使用起重磁铁吊起的物体的重量的施工机械。
附图说明
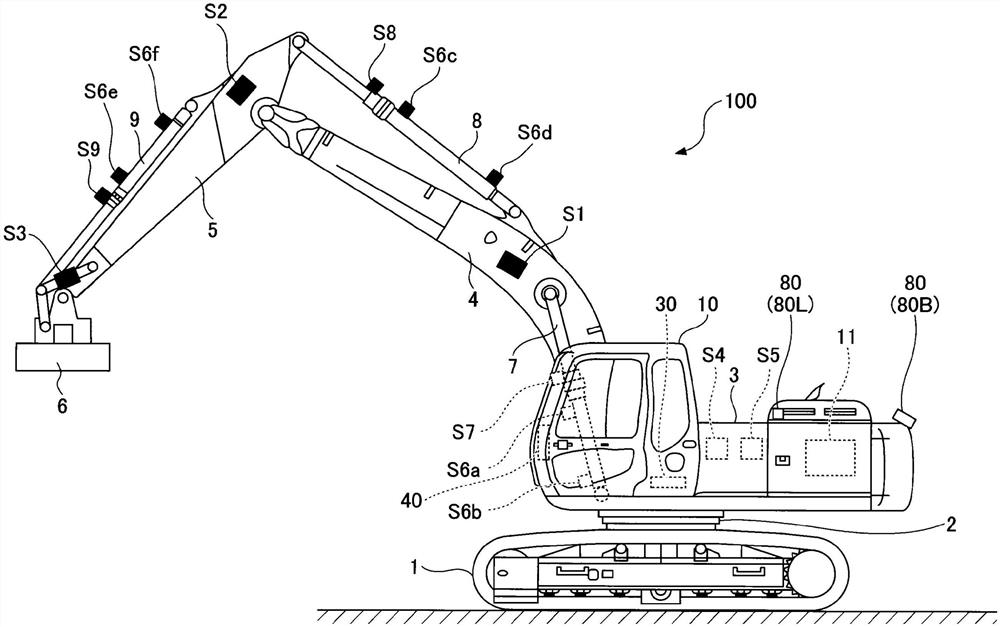
图1是本发明的实施方式所涉及的施工机械的侧视图。
图2是表示搭载于图1所示的施工机械的驱动系统的结构例的框图。
图3是表示主画面的结构例的图。
图4是表示主画面的另一结构例的图。
图5是表示主画面的又一结构例的图。
图6是表示主画面的又一结构例的图。
图7是磁力调节处理的流程图。
图8是表示主画面的又一结构例的图。
图9是表示电动操作系统的结构例的图。
图10是表示施工机械的管理系统的结构例的概略图。
具体实施方式
图1是本发明的实施方式所涉及的施工机械100的侧视图。在施工机械100的下部行走体1中经由回转机构2搭载有上部回转体3。在上部回转体3中安装有动臂4。在动臂4的前端安装有斗杆5,在斗杆5的前端安装有作为端接附件的起重磁铁6。动臂4及斗杆5构成附属装置的一例即工作附件。而且,动臂4由动臂缸7驱动,斗杆5由斗杆缸8驱动,起重磁铁6由起重磁铁缸9驱动。
在动臂4中安装有动臂角度传感器S1,在斗杆5中安装有斗杆角度传感器S2,在起重磁铁6中安装有起重磁铁角度传感器S3。在上部回转体3中安装有控制器30、显示装置40、摄像装置80、机身倾斜度传感器S4及回转角速度传感器S5。在上部回转体3中也可以代替摄像装置80或与摄像装置80分开地安装有物体检测装置。
动臂角度传感器S1以检测动臂4相对于上部回转体3的转动角度即动臂角度的方式构成。动臂角度传感器S1例如可以是检测围绕动臂脚销的动臂4的旋转角度的旋转角度传感器、检测动臂缸7的行程量(动臂行程量)的缸行程传感器或检测动臂4的倾斜角度的倾斜度(加速度)传感器等,也可以是加速度传感器与陀螺仪传感器的组合。关于检测斗杆5相对于动臂4的转动角度即斗杆角度的斗杆角度传感器S2及检测起重磁铁6相对于斗杆5的转动角度即起重磁铁角度的起重磁铁角度传感器S3也相同。
机身倾斜度传感器S4以检测上部回转体3的倾斜度(机身倾斜角度)的方式构成。在本实施方式中,机身倾斜度传感器S4为检测相对于水平面的围绕上部回转体3的前后轴及左右轴的倾斜角度的加速度传感器。上部回转体3的前后轴及左右轴例如彼此正交并且通过施工机械100的回转轴上的一点即机械中心点。
回转角速度传感器S5以检测上部回转体3的回转角速度的方式构成。在本实施方式中,回转角速度传感器S5为陀螺仪传感器。回转角速度传感器S5也可以是旋转变压器或旋转编码器等。
摄像装置80以拍摄施工机械100周围的方式构成。摄像装置80例如为单镜头摄像机、立体摄像机、距离图像摄像机、红外线摄像机或LIDAR等。在图1的例子中,摄像装置80包含安装于上部回转体3的上表面后端的后摄像机80B、安装于上部回转体3的上表面左端的左摄像机80L及安装于上部回转体3的上表面右端的右摄像机80R(在图1中未图示。)。
物体检测装置以检测存在于施工机械100周围的物体的方式构成。物体检测装置包含监视施工机械100后方空间的后传感器、监视施工机械100左方空间的左传感器及监视施工机械100右方空间的右传感器。物体检测装置也可以包含监视施工机械100前方空间的前传感器。后传感器、左传感器及右传感器分别例如为LIDAR、毫米波雷达或立体摄像机等。
当使用摄像装置80的输出而检查物体时,控制器30例如在对摄像装置80所拍摄的图像实施了各种图像处理的基础上,利用公知的图像识别技术对物体进行检测。另外,摄像装置80也可以包含拍摄施工机械100前方空间的前摄像机。
在动臂缸7中也可以安装有压力传感器S6a、压力传感器S6b及动臂缸行程传感器S7。在斗杆缸8中也可以安装有压力传感器S6c、压力传感器S6d及斗杆缸行程传感器S8。在起重磁铁缸9中也可以安装有压力传感器S6e、压力传感器S6f及起重磁铁缸行程传感器S9。
压力传感器S6a检测动臂缸7的杆侧油室的压力,压力传感器S6b检测动臂缸7的底侧油室的压力(以下,称为“动臂底部压力”。)。压力传感器S6c检测斗杆缸8的杆侧油室的压力,压力传感器S6d检测斗杆缸8的底侧油室的压力。压力传感器S6e检测起重磁铁缸9的杆侧油室的压力,压力传感器S6f检测起重磁铁缸9的底侧油室的压力。
在上部回转体3中设置有作为驾驶室的操纵室10,且搭载有发动机11等动力源。
图2是表示搭载于施工机械100的驱动系统的结构例的图。在图2中,机械的动力传递线路以双重线来表示,工作油管路以粗实线来表示,先导管路以虚线来表示,电控制线路以单点划线来表示,电驱动线路以粗点线来表示。
施工机械100的驱动系统主要由发动机11、主泵14、液压泵14G、先导泵15、控制阀单元17、操作装置26、控制器30及发动机控制装置74构成。
发动机11为施工机械100的动力源,例如为以维持规定转速的方式进行动作的柴油机。发动机11的输出轴分别与交流发电机11a、主泵14、液压泵14G及先导泵15的输入轴连接。
主泵14将工作油经由工作油管路16供给至控制阀单元17。在本实施方式中,主泵14为斜板式可变容量型液压泵。
调节器14a以控制主泵14的吐出量的方式构成。在本实施方式中,调节器14a根据来自控制器30的控制信号等调节主泵14的斜板偏转角,由此控制主泵14的吐出量。
先导泵15以经由先导管路25向包含操作装置26的各种液压控制设备供给工作油的方式构成。在本实施方式中,先导泵15为固定容量型液压泵。但是,也可以省略先导泵15。在该情况下,先导泵15所担负的功能也可以通过主泵14来实现。即,除了向控制阀单元17供给工作油的功能以外,主泵14也可以具备在通过节流器等降低了工作油的压力之后向操作装置26等供给工作油的功能。
控制阀单元17为控制施工机械100中的液压系统的液压控制装置。控制阀单元17例如对动臂缸7、斗杆缸8、起重磁铁缸9、左侧行走用液压马达1L、右侧行走用液压马达1R及回转用液压马达2A中的一个或多个选择性地供给主泵14吐出的工作油。另外,在以下说明中,将动臂缸7、斗杆缸8、起重磁铁缸9、左侧行走用液压马达1L、右侧行走用液压马达1R及回转用液压马达2A统称为“液压促动器”。
操作装置26为操作人员为了操作液压促动器而使用的装置。在本实施方式中,操作装置26将来自先导泵15的工作油向存在于控制阀单元17内的所对应的流量控制阀的先导端口供给而生成先导压。具体而言,操作装置26包含用于进行回转操作及斗杆操作的左操作杆、用于进行动臂操作及起重磁铁操作的右操作杆、行进踏板以及行走杆(均未图示。)等。先导压根据操作装置26的操作内容(例如包含操作方向及操作量。)而发生变化。
操作压力传感器29以检测操作装置26所生成的先导压的方式构成。在本实施方式中,操作压力传感器29检测操作装置26所生成的先导压,并且将该检测值输出至控制器30。控制器30根据操作压力传感器29的输出,掌握操作装置26的各操作内容。
控制器30为执行各种运算的控制装置。在本实施方式中,控制器30为具备CPU、易失性存储装置及非易失性存储装置等的微型计算机。控制器30例如从非易失性存储装置读取与各种功能对应的程序而加载于易失性存储装置,并且使CPU执行分别与这些程序对应的处理。
液压泵14G以将工作油经由工作油管路16a供给至液压马达60的方式构成。在本实施方式中,液压泵14G为固定容量型液压泵,通过切换阀61向液压马达60供给工作油。
切换阀61以切换液压泵14G吐出的工作油的流动的方式构成。在本实施方式中,切换阀61为根据来自控制器30的控制指示而切换阀位置的电磁阀。切换阀61具有连通液压泵14G与液压马达60之间的第1阀位置及切断液压泵14G与液压马达60之间的连通的第2阀位置。
若操作模式切换开关62而施工机械100的动作模式切换为起重磁铁模式,则控制器30对切换阀61输出控制信号而将切换阀61切换为第1阀位置。并且,若操作模式切换开关62而施工机械100的动作模式切换为起重磁铁模式以外,则控制器30对切换阀61输出控制信号而将切换阀61切换为第2阀位置。图2表示切换阀61处于第2阀位置的状态。
模式切换开关62为切换施工机械100的动作模式的开关。在本实施方式中,是设置于操纵室10内的翘板开关。操作人员操作模式切换开关62而以二选一的方式切换挖土机模式及起重磁铁模式。挖土机模式为使施工机械100作为挖掘机(挖土机)进行工作时的动作模式,例如在铲斗代替起重磁铁6而安装于斗杆5的前端时选择。起重磁铁模式为使施工机械100作为带起重磁铁施工机械进行工作时的模式,在起重磁铁6安装于斗杆5的前端时选择。另外,控制器30也可以根据各种传感器的输出自动切换施工机械100的动作模式。
当选择了起重磁铁模式时,切换阀61设定于第1阀位置,并且使液压泵14G吐出的工作油流入液压马达60。另一方面,当选择了起重磁铁模式以外的动作模式时,切换阀61设定于第2阀位置,使液压泵14G吐出的工作油不流入液压马达60而流出至工作油罐。
液压马达60的旋转轴与发电机63的旋转轴机械连结。发电机63以生成用于对起重磁铁6进行励磁的电力的方式构成。在本实施方式中,发电机63为根据来自电力控制装置64的控制指示进行动作的交流发电机。
电力控制装置64以控制用于对起重磁铁6进行励磁的电力的供给、切断的方式构成。在本实施方式中,电力控制装置64根据来自控制器30的发电开始指示、发电停止指示来控制基于发电机63的交流电的发电的开始、停止。电力控制装置64以将发电机63发电的交流电转换为直流电并供给至起重磁铁6的方式构成。电力控制装置64能够控制施加于起重磁铁6的电压的大小及流过起重磁铁6的电流的大小。
若起重磁铁开关65被开启操作而成为开启状态,则控制器30对电力控制装置64输出吸附指示。接收了吸附指示的电力控制装置64将发电机63发电的交流电转换为直流电并供给至起重磁铁6,对起重磁铁6进行励磁。已励磁的起重磁铁6成为能够吸附物体(磁性体)的吸附状态。
并且,若起重磁铁开关65被关闭操作而成为关闭状态,则控制器30对电力控制装置64输出释放指示。接收了释放指示的电力控制装置64中止基于发电机63的发电,使处于吸附状态的起重磁铁6成为非吸附状态(释放状态)。起重磁铁6的释放状态表示向起重磁铁6的电力供给被中止而起重磁铁6所产生的电磁力消失的状态。
起重磁铁开关65为切换起重磁铁6的吸附、释放的开关。在本实施方式中,起重磁铁开关65包含设置于左操作杆26L的顶部的作为按钮开关的弱励磁按钮65A及强励磁按钮65B、以及设置于右操作杆26R的顶部的作为按钮开关的释放按钮65C。
弱励磁按钮65A为用于对起重磁铁6施加规定的第1电压而使起重磁铁6成为吸附状态(弱吸附状态)的输入装置的一例。规定的第1电压例如为通过磁力调节转盘66设定的电压。
强励磁按钮65B为用于对起重磁铁6施加规定的第2电压而使起重磁铁6成为吸附状态(强吸附状态)的输入装置的一例。规定的第2电压为高于规定的第1电压的电压。规定的第2电压例如为允许最大电压。
释放按钮65C为用于使起重磁铁6成为释放状态的输入装置的一例。
磁力调节转盘66为用于调节起重磁铁6的磁力(吸附力)的转盘。在本实施方式中,磁力调节转盘66设置于操纵室10内,且以能够以4个阶段来切换按下弱励磁按钮65A时的起重磁铁6的磁力(吸附力)的方式构成。具体而言,磁力调节转盘66以能够以第1等级至第4等级这4个阶段来切换起重磁铁6的磁力(吸附力)的方式构成。图2表示通过磁力调节转盘66选择了第3等级的状态。
起重磁铁6例如被控制成产生通过磁力调节转盘66设定的等级的磁力(吸附力)。磁力调节转盘66将表示磁力(吸附力)的等级的数据输出至控制器30。
根据该结构,操作人员能够一边用左手操作左操作杆26L且用右手操作右操作杆26R而使工作附件进行动作,一边用手指执行起重磁铁6对物体(磁性体)的吸附及释放。典型地,操作人员在使起重磁铁6与物体(例如废铁等)接触了的状态下,按下弱励磁按钮65A而使废铁吸附于起重磁铁6。然后,操作人员在缓慢提升动臂4并且抬起吸附有废铁的起重磁铁6之后,按下强励磁按钮65B而增大起重磁铁6的磁力(吸附力)。这是为了防止在基于附属装置操作(包含动臂操作、斗杆操作及铲斗操作中的至少一个操作)或回转操作的废铁的搬运中废铁从起重磁铁6掉落。
并且,操作人员通过磁力调节转盘66调节起重磁铁6的磁力(吸附力),由此能够对物体进行分类。操作人员例如通过使用较弱等级的磁力(吸附力)而从废料堆中选择性地吊起比较轻的物体并使其移动,由此能够对比较轻的物体及比较重的物体进行分类。因此,操作人员通过使用比较弱等级的磁力(吸附力),由此能够防止吊起比较重的物体。
施工机械100也可以以在按下弱励磁按钮65A或强励磁按钮65B时将动作模式自动切换为速度制限模式的方式构成。速度制限模式例如为起重磁铁模式的一例,是回转速度及附属装置的驱动速度被限制的动作模式。
并且,当在按下弱励磁按钮65A之后进行了规定的操作时、或成为规定的状态时,施工机械100也可以使起重磁铁6的状态自动转移到按下强励磁按钮65B时的状态即强吸附状态。规定的操作例如为回转操作。规定的状态例如为附属装置成为规定的姿势的状态,具体而言是动臂角度成为规定角度的状态。在该情况下,施工机械100为,例如当按下弱励磁按钮65A而成为弱吸附状态的起重磁铁6在根据动臂提升操作而抬起之后进行了回转操作时,即便不按下强励磁按钮65B,也能够使起重磁铁6的状态自动转移到强吸附状态。
显示装置40为显示各种信息的装置。在本实施方式中,显示装置40固定于设置有驾驶座的操纵室10的右前部的立柱(未图示。)。并且,如图2所示,显示装置40能够将与施工机械100相关的信息显示于图像显示部41而向操作人员提供信息。并且,显示装置40包含作为输入装置的操作部42。操作人员能够利用操作部42对控制器30输入各种指示。
操作部42为包含各种开关的面板。在本实施方式中,操作部42包含作为硬件按钮的照明开关42a、刮水器开关42b及窗清洗器开关42c。照明开关42a为用于切换安装于操纵室10外部的灯的点亮、熄灭的开关。刮水器开关42b为用于切换刮水器的工作、停止的开关。窗清洗器开关42c为用于喷射窗清洗液的开关。
显示装置40以从蓄电池70接收电力的供给而进行动作的方式构成。蓄电池70以利用通过交流发电机11a发电的电力来充电的方式构成。蓄电池70的电力也供给至除了控制器30及显示装置40以外的电装件72等。发动机11的起动装置11b以由来自蓄电池70的电力驱动而使发动机11起动的方式构成。
发动机控制装置74以控制发动机11的方式构成。在本实施方式中,发动机控制装置74收集表示发动机11的状态的各种数据,并且将所收集的数据发送至控制器30。发动机控制装置74与控制器30分体构成,但也可以一体地构成。例如,发动机控制装置74也可以合并到控制器30中。
发动机转速调节转盘75为用于调节发动机转速的转盘。在本实施方式中,发动机转速调节转盘75设置于操纵室10内,且以能够以4个阶段来切换发动机转速的方式构成。具体而言,发动机转速调节转盘75以能够以SP模式、H模式、A模式及怠速模式这4个阶段来切换发动机转速的方式构成。图2表示通过发动机转速调节转盘75选择了H模式的状态。
SP模式为希望优先工作量时选择的转速模式,利用最高的发动机转速。H模式为希望兼顾工作量与油耗时选择的转速模式,利用第2高的发动机转速。A模式为希望一边优先油耗一边以低噪声来运转施工机械时选择的转速模式,利用第3高的发动机转速。怠速模式为希望以怠速状态使发动机进行动作时选择的转速模式,利用最低的发动机转速(怠速转速)。
发动机11被控制成维持与通过发动机转速调节转盘75设定的转速模式对应的发动机转速。发动机转速调节转盘75将表示发动机转速的设定状态的数据输出至控制器30。
接着,参考图3对显示于显示装置40的主画面41V的结构例进行说明。图3的主画面41V例如在动作模式为起重磁铁模式时显示于图像显示部41。
主画面41V包含日期时间显示区域41a、行走模式显示区域41b、附属装置显示区域41c、油耗显示区域41d、发动机控制状态显示区域41e、发动机运转时间显示区域41f、冷却水温显示区域41g、燃料余量显示区域41h、转速模式显示区域41i、尿素水余量显示区域41j、工作油温显示区域41k、复位按钮41r、摄像机图像显示区域41x、当前重量显示区域41y及累计重量显示区域41z。
行走模式显示区域41b、附属装置显示区域41c、发动机控制状态显示区域41e及转速模式显示区域41i为显示与施工机械100的设定状态相关的信息即设定状态信息的区域。油耗显示区域41d、发动机运转时间显示区域41f、冷却水温显示区域41g、燃料余量显示区域41h、尿素水余量显示区域41j、工作油温显示区域41k、当前重量显示区域41y及累计重量显示区域41z为显示与施工机械100的运转状态相关的信息即运转状态信息的区域。
具体而言,日期时间显示区域41a为显示当前的日期时间的区域。行走模式显示区域41b为显示当前的行走模式的区域。附属装置显示区域41c为显示表示当前所安装的端接附件的图像的区域。图3示出了显示有表示起重磁铁6的图像的状态。
油耗显示区域41d为显示通过控制器30计算的油耗信息的区域。油耗显示区域41d包含显示总平均油耗或区间平均油耗的平均油耗显示区域41d1及显示瞬时油耗的瞬时油耗显示区域41d2。
发动机控制状态显示区域41e为显示发动机11的控制状态的区域。发动机运转时间显示区域41f为显示发动机11的累计运转时间的区域。冷却水温显示区域41g为显示当前的发动机冷却水的温度状态的区域。燃料余量显示区域41h为显示储存于燃料箱的燃料的余量状态的区域。转速模式显示区域41i为显示通过发动机转速调节转盘75设定的当前的转速模式的区域。尿素水余量显示区域41j为显示储存于尿素水箱的尿素水的余量状态的区域。工作油温显示区域41k为显示工作油罐内的工作油的温度状态的区域。
摄像机图像显示区域41x为显示摄像装置80所拍摄的图像的区域。在图3的例子中,摄像机图像显示区域41x显示有后摄像机80B所拍摄的后摄像机图像。后摄像机图像为显示施工机械100后方空间的后方图像,包含平衡配重的图像3a。
当前重量显示区域41y为显示起重磁铁6当前所吊起的物体的重量(以下,称为“当前重量”。)的区域。图3示出了当前重量为900kg的情况。
控制器30例如根据工作附件的姿势、动臂底部压力、预先登录的工作附件的规格(重量及重心位置等)来计算当前重量。具体而言,控制器30根据动臂角度传感器S1、斗杆角度传感器S2、起重磁铁角度传感器S3及压力传感器S6b等信息获取装置的输出来计算当前重量。
累计重量显示区域41z为显示在规定的期间内起重磁铁6所吊起的物体的重量的累计值(以下,称为“累计重量”。)的区域。图3示出了累计重量为8500kg的情况。例如,每次按下释放按钮65C时累计起重磁铁6所吊起的物体的重量。
规定的期间例如为在按下复位按钮41r时开始的期间。操作人员例如在进行向自卸车的货箱上装载废铁的工作时,在每次交换装载对象的自卸车时按下复位按钮41r而复位累计重量。这是为了能够轻松地掌握装载于各自卸车的废铁的总重量。
根据该结构,施工机械100能够防止超过自卸车的最大装载重量地向自卸车的货箱装载废铁。若通过地磅的重量测量而检测到超过最大装载重量地装载有废铁,则自卸车的驾驶员需要返回装货场而进行将装载于货箱的废铁的一部分卸下的工作。施工机械100能够防止发生这种装载重量的调整工作。
规定的期间例如也可以是从开始一天的工作的时刻至结束一天的工作的时刻的期间。这是为了使操作人员或管理人员能够轻松地识别通过一天的工作搬运的废铁的总重量。
复位按钮41r为用于复位累计重量的软件按钮。复位按钮41r也可以是配置于操作部42、左操作杆26L或右操作杆26R等的硬件按钮。
控制器30也可以以自动识别自卸车的交换而自动复位累计重量的方式构成。在该情况下,控制器30可以利用摄像装置80所拍摄的图像来识别自卸车的交换,也可以利用通信装置来识别自卸车的交换。
并且,控制器30也可以以如下方式构成,即,在根据摄像装置80所拍摄的图像,识别出通过起重磁铁6吊起的废铁已装载于自卸车的货箱的基础上,累计当前重量。这是为了防止移动到自卸车的货箱以外的场所的废铁作为装载于自卸车的废铁来累计。
控制器30也可以根据工作附件的姿势,判定通过起重磁铁6吊起的废铁是否已装载于自卸车的货箱。具体而言,控制器30例如也可以在起重磁铁6的高度超过规定值(例如,自卸车的货箱的高度)且按下了释放按钮65C时,判定为废铁已装载于自卸车的货箱。
控制器30也可以以在判定为当前重量超过了规定值时输出警报的方式构成。规定值例如为根据额定起吊重量的值。警报可以是视觉警报、听觉警报或触觉警报。根据该结构,控制器30能够将当前重量超过规定值的情况或存在该可能性的情况传送至操作人员。
当将废铁等比较小的废料作为起吊对象时,由于对吸附于起重磁铁6的废料的体积有限制,因此施工机械100不会过度增大当前重量。但是,当将铁板或铁块等比较大的物体作为起吊对象时,施工机械100有时会吊起施工机械100的稳定度SV低于规定值(例如1.0)的程度的过重的物体。另外,施工机械100的稳定度SV以SV=(W2×L2)/(W1×L1)来表示。W1为(包含所吊起的物体的重量的)工作附件的重量,L1为从翻转支点至工作附件的重心的水平距离。并且,W2为(将工作附件的重量除外的)施工机械100的机身的重量,L2为从翻转支点至机身的重心的水平距离。
当吊起了过重的物体时,控制器30能够使蜂鸣器鸣响且将表示当前重量超过了规定值的图像显示于显示装置40。因此,控制器30能够防止操作人员在未注意的情况下持续吊起了过重的物体的状态。其结果,控制器30能够提高施工机械100的工作安全性。
接着,参考图4对显示于显示装置40的主画面41V的另一结构例进行说明。图4的主画面41V在包含剩余重量显示区域41s及推荐设定显示区域41t的方面与图3的主画面41V不同,但在其他方面相同。因此,省略对相同部分的说明,对不同部分进行详细说明。
剩余重量显示区域41s为显示规定的目标重量与当前重量或累计重量之差即剩余重量的区域。规定的目标重量例如为自卸车的最大装载重量。图4示出了累计重量为9500kg,且剩余重量为500kg的情况。即,示出了目标重量为10000kg的情况。但是,显示装置40可以不显示剩余重量而显示目标重量,也可以与剩余重量分开显示目标重量。
推荐设定显示区域41t为显示与起重磁铁6的磁力相关的推荐值的区域。与起重磁铁6的磁力相关的推荐值例如为施加于起重磁铁6的电压的推荐值、流过起重磁铁6的电流的推荐值或磁力调节转盘66的推荐等级等。图4所示的主画面41V督促操作人员在起重磁铁6当前所吊起的900kg的废铁被装载于自卸车的货箱之后、将施加于起重磁铁6的电压设定为120V。将施加于起重磁铁6的电压设定为120V例如表示将磁力调节转盘66调到第2等级。操作人员通过在将900kg的废铁装载于自卸车的货箱之后将磁力调节转盘66调到第2等级,由此在下次的起重磁铁6的励磁时,能够使500kg的废铁吸附于起重磁铁6且吊起。即,能够使通过下次的装载工作装载于自卸车的货箱的废铁的累计重量与目标重量(最大装载重量)一致。
操作人员也可以为了减少当前重量即为了使通过起重磁铁6已吊起的物体的一部分掉落而利用磁力调节转盘66。
控制器30例如根据在过去的工作中获得的、施加于起重磁铁6的电压值与起重磁铁6所吊起的废铁的重量之间的关系,来导出推荐值。例如,当在过去的多次装载工作中采用了相同的电压值时,根据过去多次装载工作各自的起吊重量的平均值,导出产生为了吊起剩余重量而需要的磁力(吸附力)的电压值。
控制器30不仅显示推荐设定,还可以自动地采用推荐设定。即,控制器30也可以不强制操作人员操作磁力调节转盘66就能够调节起重磁铁6的磁力(吸附力)。
例如,控制器30求出过去起重磁铁6所吊起的废铁的重量与当时的起重磁铁6的输出值(电压值或电流值等)之间的对应关系,并根据该对应关系及在这次装载工作中应吊起的重量,计算起重磁铁6这次的输出值。然后,控制器30根据计算出的输出值,不强制操作人员操作磁力调节转盘66就能够调节起重磁铁6的磁力(吸附力)。
接着,参考图5对显示于显示装置40的主画面41V的又一结构例进行说明。图5的主画面41V在代替摄像机图像显示区域41x而具有工作履历显示区域41u的方面与图3的主画面41V不同,但在其他方面相同。因此,省略对相同部分的说明,对不同部分进行详细说明。
工作履历显示区域41u为显示施工机械100的工作履历的区域。显示于工作履历显示区域41u的信息例如包含与按起吊重量进行合计的运转时间相关的信息、与非加法运算时间相关的信息、与故障时间相关的信息及与触碰次数相关的信息等。运转时间例如为发动机11的运转时间。
图5中,作为与按起吊重量进行合计的运转时间相关的信息,示出了当前重量为额定起吊重量的30%以下时的运转时间、当前重量为额定起吊重量的31%以上且40%以下时的运转时间、……及当前重量为额定起吊重量的101%以上时的运转时间。控制器30在按起吊重量合计了运转时间的基础上,可以按回转半径合计运转时间,也可以按操作人员进行合计。当按操作人员进行合计时,施工机械100也可以具备摄像机或非接触式读卡器等用于识别操作人员的装置。
非加法运算时间为除按起吊重量进行合计的运转时间以外的运转时间。在本实施方式中,非加法运算时间不包含故障时间。控制器30例如与按起吊重量进行合计的运转时间分开,将计算出的当前重量的值不稳定时的运转时间作为非加法运算时间来进行合计。这是因为有可能无法准确地计算出当前重量。控制器30例如在规定时间(例如数秒期间)的当前重量的变动幅度大于规定值时,判断为当前重量的值不稳定,且将该期间作为非加法运算时间来进行合计。
故障时间为信息获取装置出现故障时的运转时间。控制器30例如与按起吊重量进行合计的运转时间及非加法运算时间分开,将信息获取装置(例如动臂角度传感器S1)出现故障时的运转时间作为故障时间来进行合计。这是因为,当信息获取装置出现故障时,控制器30无法准确地计算当前重量。控制器30例如在信息获取装置的输出不在规定的允许范围内时,判断为该信息获取装置出现故障,并且将该期间作为故障时间来进行合计。
触碰次数为起重磁铁6触碰了起吊对象的物体的次数。控制器30例如根据操作压力传感器29及压力传感器S6b的输出,判定起重磁铁6是否与物体触碰。然后,当判定为起重磁铁6与物体触碰时,将触碰次数增加1。
在图5的例子中,显示于工作履历显示区域41u的信息与施工机械100出货之后的整个期间相关。即,合计期间为施工机械100出货之后的整个期间。但是,合计期间也可以构成为能够切换为最近的一个月、最近的三个月或最近的六个月。例如,控制器30也可以以每次操作规定的按钮时就切换合计期间的方式构成。
并且,在图5的例子中,工作履历显示区域41u作为构成主画面41V的一部分的区域而显示于主画面41V的右侧,但也可以进行全画面显示。并且,在图5的例子中,工作履历显示区域41u以表格形式来显示与工作履历相关的信息,但也可以使用条形图、饼状图或折线图等来显示与工作履历相关的信息。
控制器30也可以通过通信装置将显示于工作履历显示区域41u的信息向外部设备发送。外部设备例如为设置于管理中心等的管理装置或管理人员等所携带的智能手机等移动终端装置。
根据该结构,操作人员或管理人员能够在任意的定时确认表示施工机械100在过去被如何操作的工作履历。
接着,参考图6对显示于显示装置40的主画面41V的又一结构例进行说明。图6的主画面41V主要在显示于具备纵长的图像显示部41的显示装置40的方面与图5的主画面41V不同,但在其他方面相同。因此,省略对相同部分的说明,对不同部分进行详细说明。
在图6所示的例子中,图像显示部41除了包含日期时间显示区域41a、行走模式显示区域41b、附属装置显示区域41c、油耗显示区域41d、发动机控制状态显示区域41e、发动机运转时间显示区域41f、冷却水温显示区域41g、燃料余量显示区域41h、转速模式显示区域41i、尿素水余量显示区域41j、工作油温显示区域41k、复位按钮41r、工作履历显示区域41u、当前重量显示区域41y及累计重量显示区域41z以外,还包含空调运行状态显示区域41m、图像显示区域41n及菜单显示区域41p。
空调运行状态显示区域41m为显示作为设定状态信息的与空调的运行状态相关的信息的区域,包含显示当前的出风口的位置的出风口显示区域41m1、显示当前的运行模式的运行模式显示区域41m2、显示当前的设定温度的温度显示区域41m3及显示当前的设定风量的风量显示区域41m4。
图像显示区域41n为显示各种图像的区域。各种图像例如为摄像装置80所拍摄的图像等。在图6所示的例子中,在图像显示区域41n显示有后摄像机80B所拍摄的后方图像CBT。另外,在图6所示的例子中,图像显示区域41n与工作履历显示区域41u沿上下相邻配置,但也可以隔着间隔配置。
后方图像CBT为显现施工机械100后方空间的图像,包含表示平衡配重的上表面的一部分的图像3a。在本实施方式中,后方图像CBT为通过显示装置40生成的实际视点图像,基于后摄像机80B所获取的图像而生成。
在图像显示区域41n也可以不显示后方图像CBT而显示俯瞰图像。俯瞰图像为通过显示装置40生成的虚拟视点图像,基于后摄像机80B、左摄像机80L及右摄像机80R分别获取的图像而生成。并且,在俯瞰图像的中央部分配置有与施工机械100对应的施工机械图形。这是为了使操作人员直观地掌握施工机械100与存在于施工机械100周围的物体之间的位置关系。
在图6所示的例子中,图像显示部41为纵长,但也可以是横长。当图像显示部41为横长时,图像显示区域41n可以配置于工作履历显示区域41u的左侧,也可以配置于工作履历显示区域41u的右侧。在该情况下,图像显示区域41n与工作履历显示区域41u也可以左右隔着间隔配置。
菜单显示区域41p具有标签区域41p1~41p7。在图6所示的例子中,在图像显示部41的最下部,标签区域41p1~41p7左右彼此隔着间隔配置。在标签区域41p1~41p7分别显示有表示关联信息的内容的图标。
在标签区域41p1显示有用于显示菜单详细项目的菜单详细项目图标。若由操作人员选择标签区域41p1,则显示于标签区域41p2~41p7的图标切换为与菜单详细项目建立关联的图标。
在标签区域41p4显示有用于显示与数字水平仪相关的信息的图标。若由操作人员选择标签区域41p4,则后方图像CBT切换为表示与数字水平仪相关的信息的第1图像。
在标签区域41p6显示有用于显示与信息化施工相关的信息的图标。若由操作人员选择标签区域41p6,则后方图像CBT切换为表示与信息化施工相关的信息的第2图像。
在标签区域41p7显示有用于显示与起重机模式相关的信息的图标。若由操作人员选择标签区域41p7,则后方图像CBT切换为表示与起重机模式相关的信息的第3图像。
但是,第1图像、第2图像或第3图像等菜单图像均可以重叠显示于后方图像CBT上。或者,后方图像CBT也可以以空出用于显示菜单图像的场所的方式缩小。
在标签区域41p2、41p3及41p5未显示图标。因此,即便由操作人员操作标签区域41p2、41p3或41p5,显示于图像显示部41的图像也不会发生变化。
另外,显示于标签区域41p1~41p7的图标并不限定于上述例,也可以显示用于显示其他信息的图标。
在图6所示的例子中,操作部42由操作人员用于进行标签区域41p1~41p7的选择及设定输入等的多个按钮式开关构成。具体而言,操作部42包含配置于上段的7个开关42a1~42a7及配置于下段的7个开关42b1~42b7。开关42b1~42b7配置于开关42a1~42a7各自的下方。但是,操作部42的开关的数量、方式及配置并不限定于上述例。例如,操作部42也可以是如滚动盘或滚动开关等那样将多个按钮式开关的功能汇整为一个的方式。并且,操作部42也可以构成为相对于显示装置40独立的部件。并且,标签区域41p1~41p7也可以构成为软件按钮。在该情况下,操作人员能够通过对标签区域41p1~41p7进行触摸操作而选择任意的标签区域。
在图6所示的例子中,开关42a1与标签区域41p1对应地配置在标签区域41p1的下方,并且作为选择标签区域41p1的开关而发挥功能。关于各个开关42a2~42a7也相同。
根据该结构,操作人员能够直观地识别在选择标签区域41p1~41p7中所期望的一个开关时、对开关42a1~42a7中哪个进行操作即可。
开关42b1为切换显示于图像显示区域41n的拍摄图像的开关。拍摄图像是指摄像装置80所拍摄的图像。显示装置40以每次操作开关42b1时显示于图像显示区域41n的拍摄图像例如在后方图像CBT、左摄像机80L所拍摄的左方图像及右摄像机80R所拍摄的右方图像之间被切换的方式构成。或者,显示装置40也可以以每次操作开关42b1时图像显示区域41n与工作履历显示区域41u交换的方式构成。
如此,操作人员也可以通过操作作为操作部42的开关42b1来切换显示于图像显示区域41n的图像。或者,操作人员也可以通过操作开关42b1来切换图像显示区域41n与工作履历显示区域41u。
开关42b2及42b3为调节空调的风量的开关。在图6所示的例子中,操作部42以如下方式构成,即,若操作开关42b2,则空调的风量变小,若操作开关42b3,则空调的风量变大。
开关42b4为切换制冷、供暖功能的“开启”、“关闭”的开关。在图6所示的例子中,操作部42以每当操作开关42b4就切换制冷、供暖功能的“开启”、“关闭”的方式构成。
开关42b5及42b6为调节空调的设定温度的开关。在图6所示的例子中,操作部42以如下方式构成,即,若操作开关42b5,则设定温度变低,若操作开关42b6,则设定温度变高。
开关42b7为切换显示于发动机运转时间显示区域41f的与发动机11的运转时间相关的信息的内容的开关。与发动机11的运转时间相关的信息例如包含与整个期间相关的累计运转时间及与一部分期间相关的累计运转时间等。
并且,开关42a2~42a6、42b2~42b6以能够输入显示于各个开关或开关附近的数字的方式构成。并且,开关42a3、42a4、42a5、42b4以在图像显示部41显示有光标时能够使光标向左、上、右、下移动的方式构成。
另外,对开关42a1~42a7及42b1~42b7分别赋予的功能为一例,也可以构成为能够执行其他功能。
接着,参考图7对控制器30调节起重磁铁6的磁力(吸附力)的处理(以下,称为“磁力调节处理”。)进行说明。图7是磁力调节处理的一例的流程图。控制器30例如每次按下弱励磁按钮65A时执行该磁力调节处理。
当进行向自卸车的货箱装载废铁等物体的工作时,施工机械100的操作人员例如按下弱励磁按钮65A而使起重磁铁6成为弱吸附状态并使起重磁铁6吸附废铁。然后,操作人员例如在通过动臂提升操作抬起了起重磁铁6之后按下强励磁按钮65B而使起重磁铁6成为强吸附状态。其目的在于,将磁力调节为,在基于之后的附属装置操作或回转操作的起重磁铁6的移动中废铁等物体不会从起重磁铁6抖落。然后,操作人员通过附属装置操作及回转操作,使起重磁铁6移动至所期望的场所的正上方。然后,操作人员在起重磁铁6移动至所期望的场所的正上方时,按下释放按钮65C而使起重磁铁6成为释放状态,由此能够将吸附于起重磁铁6的废铁掉落到所期望的场所。
首先,控制器30获取目标重量Wt(步骤ST1)。在本实施方式中,控制器30获取通过起重磁铁6的这次励磁应吊起的物体的重量。具体而言,控制器30获取自卸车的最大装载重量及在该自卸车中已装载的物体的重量即累计重量。然后,将从最大装载重量减去累计重量而得到的剩余重量作为目标重量Wt来计算。
然后,控制器30获取可起吊重量Wc(步骤ST2)。在本实施方式中,控制器30读取存储于非易失性存储装置的可起吊重量Wc。在该情况下,可起吊重量Wc例如为在对起重磁铁6施加了允许最大电压时能够吊起的物体的重量。但是,可起吊重量Wc也可以是在对起重磁铁6施加了当前的设定电压时能够吊起的物体的重量。当前的设定电压例如为通过磁力调节转盘66设定的电压。控制器30也可以根据最近的一次或多次的吊起结果来计算可起吊重量Wc。吊起结果例如包含供给电力(供给电流或供给电压)与实际吊起的物体的重量之间的关系。
然后,控制器30判定目标重量Wt是否为可起吊重量Wc以下(步骤ST3)。即,判定通过起重磁铁6的这次励磁是否能够实现目标重量Wt量的物体的吊起。
当判定为目标重量Wt大于可起吊重量Wc时(步骤ST3的“否”),控制器30不调节起重磁铁6的磁力(吸附力)而结束这次的磁力调节处理。
当判定为目标重量Wt是可起吊重量Wc以下时(步骤ST3的“是”),控制器30调节起重磁铁6的磁力(吸附力)(步骤ST4)。在本实施方式中,控制器30以使目标重量Wt以上的可起吊重量Wc成为目标重量Wt的方式调节起重磁铁6的磁力(吸附力)。具体而言,当通过采用高于当前的设定电压的电压来实现目标重量Wt量的物体的吊起时,控制器30将当前的设定电压变更为更高的电压。或者,当通过采用低于当前的设定电压的电压来实现目标重量Wt份的物体的吊起时,控制器30将当前的设定电压变更为更低的电压。
例如,假设在向最大装载重量为10000kg的自卸车装载废铁的工作中,每次装载1200kg的废铁的工作进行多次的情况。并且,将该工作中所使用的设定电压设为150V。
当在重复进行了7次装载工作之后为了进行第8次装载而按下弱励磁按钮65A时,控制器30将1600kg计算为目标重量Wt。1600kg是从最大装载重量10000kg减去累计重量8400kg(=1200kg×7次)而得到的值。并且,将过去7次的起吊重量的平均值即1200kg计算为可起吊重量Wc。在该情况下,控制器30判定为目标重量Wt大于可起吊重量Wc,不调节起重磁铁6的磁力(吸附力)而以与到目前为止相同的设定电压来吊起1200kg的废铁并装载于自卸车的货箱。这是因为,能够判断为在这次励磁中无法完成目标重量。
然后,当为了进行第9次装载而按下弱励磁按钮65A时,控制器30将400kg计算为目标重量Wt。400kg是从最大装载重量10000kg减去累计重量9600kg(=1200kg×8次)而得到的值。并且,对将设定电压设为150V的过去8次装载工作各自中的起吊重量的平均值即1200kg进行计算,作为可起吊重量Wc。在该情况下,若在按下弱励磁按钮65A时将设定电压设为与到目前为止相同的150V,则施工机械100会吊起大于目标重量Wt的过大重量的废铁。因此,控制器30判定为目标重量Wt小于可起吊重量Wc,而调节起重磁铁6的磁力(吸附力)。具体而言,将到目前为止的设定电压即150V降低为适合吊起目标重量Wt即400kg的废铁的电压(例如50V)。
例如,控制器30求出过去起重磁铁6所吊起的废铁的重量与当时的起重磁铁6的输出值(电压值或电流值等)之间的对应关系,并根据该对应关系及在这次装载工作中应吊起的重量,计算起重磁铁6的这次的输出值即设定电压。然后,控制器30将当前的设定电压变更为计算出的设定电压,而调节起重磁铁6的磁力(吸附力)。
其结果,通过起重磁铁6吊起400kg的废铁且装载于自卸车的货箱,装载于自卸车的货箱的废铁的总重量成为与最大装载重量相同的10000kg。
如此,施工机械100通过起重磁铁6的励磁,能够不多不少地吊起目标重量Wt份的物体。
如上所述,本发明的实施方式所涉及的施工机械100具有下部行走体1、经由回转机构2搭载于下部行走体1的上部回转体3、安装于上部回转体3的工作附件、安装于工作附件的起重磁铁6、计算通过起重磁铁6吊起的物体的重量的作为控制装置的控制器30及显示控制器30计算出的物体的重量的显示装置40。根据该结构,施工机械100能够使操作人员识别出使用起重磁铁6吊起的物体的重量。
显示装置40也可以以显示与按物体的重量进行合计的运转时间相关的信息的方式构成。如图5所示,显示装置40例如也可以以显示与按通过一次励磁吊起的物体的重量进行合计的运转时间相关的信息的方式构成。通过查看该信息,操作人员或管理人员能够掌握如何使用了施工机械100。
显示装置40也可以以显示物体的重量的累计值的方式构成。如图3所示,显示装置40例如也可以以显示通过多次励磁分别吊起的物体的重量的累计值的方式构成。累计值可以在每次完成对1台自卸车的装载时进行复位,也可以在每次完成一天的工作时进行复位。根据该结构,操作人员例如能够掌握装载于各自卸车的货箱的物体的重量。或者,操作人员能够以所吊起的物体的重量的方式掌握一天的工作量。
图8示出了包含作为施工机械100的工作履历而显示各天的工作量的变化的工作履历显示区域41u的主画面。
图8所示的工作履历显示区域41u显示有与在8天的日程中进行的废铁的装载工作相关的工作履历。具体而言,图8的工作履历显示区域41u包含表示在各天的工作中应装载于自卸车的货箱的废铁的总重量即目标重量的目标线TL、及表示在各天的工作中实际装载于自卸车的货箱的废铁的总重量即实际重量的条形图像GB。
更具体而言,图8的工作履历显示区域41u示出了8天的日程中已完成5天的工作而第6天的工作正在进行的情况。图8的工作履历显示区域41u以与表示通过已经完成的工作即第1天至第5天的工作实际装载于自卸车的货箱的废铁的总重量即实际重量的条形图像GB1~GB5分别不同的方式,显示表示通过当前进行中的工作即第6天的工作实际装载于自卸车的货箱的废铁的总重量即实际重量的条形图像GB6。
并且,图8的工作履历显示区域41u显示有包含目标线TL0、TL1及TL2的目标线TL。目标线TL0表示在第1天的工作开始之前设定的当初的目标重量。目标线TL1表示第3天的工作完成之后根据3天工作的结果而修正了的目标重量。在图8所示的例子中示出的情况为,在第1天至第3天各自的工作中实际重量未达到目标重量,因此提高了目标重量。目标线TL2表示在第5天的工作结束之后根据5天工作的结果而再次修正了的目标重量。在图8所示的例子中示出了的情况为,在第5天的工作中实际重量未达到修正后的目标重量,因此进一步提高了修正后的目标重量。
施工机械100的操作人员通过查看这种工作履历显示区域41u,能够轻松地识别在8天的日程中进行的废铁的装载工作产生延迟的情况。并且,操作人员能够轻松地识别延迟的大小及为了消除延迟而需要的工作量等。
施工机械100也可以具有复位累计值的复位部。复位部例如也可以是采用图3所示那样的软件按钮的形式的复位按钮41r。根据该结构,操作人员能够在任意的定时复位累计值。
使用起重磁铁6吊起的物体的重量也可以遍及预先设定的期间累计。预先设定的期间可以是连续的期间,也可以是断续的期间。并且,在预先设定的期间中也可以混合存在进行累计的期间及不进行累计的期间。根据该结构,管理人员例如能够掌握每一天的累计重量、每个工作现场的累计重量或每个操作人员的累计重量等。
控制器30也可以以能够调节起重磁铁6的吸附力的方式构成。具体而言,如图7的流程图所示,控制器30也可以以自动限制通过一次励磁能够吊起的物体的重量的方式构成。根据该结构,控制器30例如能够防止超过最大装载重量地向自卸车的货箱装载物体。
以上,对本发明的优选实施方式进行了详细说明。然而,本发明并不限制于上述实施方式。上述实施例在不脱离本发明的范围内,能够适用各种变形或置换等。并且,分开说明的特征只要在技术上不产生矛盾,则能够进行组合。
例如,在上述实施方式中,公开了具备液压式先导回路的液压操作系统。例如,在与左操作杆26L相关的液压式先导回路中,从先导泵15供给至左操作杆26L的工作油,以与通过左操作杆26L向斗杆下降方向的倾倒而开闭的遥控阀的开度相应的流量,传递至所对应的流量控制阀的先导端口。或者,在与右操作杆26R相关的液压式先导回路中,从先导泵15供给至右操作杆26R的工作油,以与通过右操作杆26R向动臂提升方向的倾倒而开闭的遥控阀的开度相应的流量,传递至所对应的流量控制阀的先导端口。
但是,也可以不采用具备这种液压式先导回路的液压操作系统而采用具备电动式先导回路的电动操作系统。在该情况下,电动操作系统中的电动式操作杆的杆操作量例如作为电信号输入于控制器30。并且,在先导泵15与各流量控制阀的先导端口之间配置有电磁阀。电磁阀以根据来自控制器30的电信号而进行动作的方式构成。根据该结构,若进行使用了电动式操作杆的手动操作,则控制器30通过根据与杆操作量对应的电信号来控制电磁阀而增减先导压,由此能够使各流量控制阀移动。另外,各流量控制阀也可以由电磁滑阀构成。在该情况下,电磁滑阀根据与电动式操作杆的杆操作量对应的来自控制器30的电信号进行动作。
当采用了具备电动式操作杆的电动操作系统时,与采用具备液压式操作杆的液压操作系统的情况相比,控制器30能够轻松地执行自主控制功能。自主控制功能为用于使施工机械100自主地动作的功能,例如包含与操作人员对操作装置26及起重磁铁开关65等的操作的内容无关地使液压促动器及起重磁铁6等自主地动作的功能。
图9表示电动操作系统的结构例。具体而言,图9的电动操作系统为用于驱动动臂缸7的动臂操作系统的一例,主要由先导压工作型的控制阀单元17、作为电动式操作杆的右操作杆26R、控制器30、提升操作用电磁阀90及下降操作用电磁阀92构成。图9的电动操作系统在用于使上部回转体3回转的回转操作系统、用于使动臂4上下摆动的动臂操作系统、用于开合斗杆5的斗杆操作系统及用于对起重磁铁6进行励磁、消磁的起重磁铁操作系统等中也同样能够适用。
先导压工作型的控制阀单元17包含与左侧行走用液压马达1L相关的流量控制阀、与右侧行走用液压马达1R相关的流量控制阀、与回转用液压马达2A相关的流量控制阀、与动臂缸7相关的流量控制阀、与斗杆缸8相关的流量控制阀及与起重磁铁缸9相关的流量控制阀等。电磁阀90以能够调节连结先导泵15和与动臂缸7相关的流量控制阀的提升侧先导端口的管路内的工作油的压力的方式构成。电磁阀92以能够调节连结先导泵15和与动臂缸7相关的流量控制阀的下降侧先导端口的管路内的工作油的压力的方式构成。
当进行手动操作时,控制器30根据右操作杆26R的操作信号生成部所输出的操作信号(电信号)来生成提升操作信号(电信号)或下降操作信号(电信号)。右操作杆26R的操作信号生成部所输出的操作信号为根据右操作杆26R的操作量及操作方向而发生变化的电信号。
具体而言,当向提升方向对右操作杆26R进行了操作时,控制器30对电磁阀90输出与杆操作量相应的提升操作信号(电信号)。电磁阀90根据提升操作信号(电信号)进行动作,并且控制作用于与动臂缸7相关的流量控制阀的提升侧先导端口的、作为提升操作信号(压力信号)的先导压。相同地,当向下降方向对右操作杆26R进行了操作时,控制器30对电磁阀92输出与杆操作量相应的下降操作信号(电信号)。电磁阀92根据下降操作信号(电信号)进行动作,并且控制作用于与动臂缸7相关的流量控制阀的下降侧先导端口的、作为下降操作信号(压力信号)的先导压。
当执行自主控制时,控制器30例如不根据右操作杆26R的操作信号生成部所输出的操作信号(电信号),而根据自主控制信号(电信号)来生成提升操作信号(电信号)或下降操作信号(电信号)。自主控制信号可以是控制器30生成的电信号,也可以是除控制器30以外的控制装置等生成的电信号。
施工机械100所获取的信息也可以通过图10所示那样的施工机械的管理系统SYS而与管理人员及其他施工机械的操作人员等共享。图10是表示施工机械的管理系统SYS的结构例的概略图。管理系统SYS为管理1台或多台施工机械100的系统。在本实施方式中,管理系统SYS主要由施工机械100、支援装置200及管理装置300构成。构成管理系统SYS的施工机械100、支援装置200及管理装置300分别可以为1台,也可以为多台。在图10的例子中,管理系统SYS包含1台施工机械100、1台支援装置200及1台管理装置300。
典型地,支援装置200为移动终端装置,例如为处于工作现场的工作人员等所携带的笔记本电脑、平板电脑或智能手机等。支援装置200也可以是施工机械100的操作人员所携带的移动终端装置。支援装置200也可以是固定终端装置。
典型地,管理装置300为固定终端装置,例如为设置于工作现场外的管理中心等的服务器计算机。管理装置300也可以是可移动性的计算机(例如,笔记本电脑、平板电脑或智能手机等移动终端装置)。
支援装置200及管理装置300中的至少一个也可以具备显示器及远程操作用操作装置。在该情况下,操作人员也可以在使用远程操作用操作装置的同时操作施工机械100。远程操作用操作装置例如通过近距离无线通信网、移动电话通信网或卫星通信网等无线通信网,与搭载于施工机械100的控制器30连接。
并且,典型地,图5、图6及图8所示的主画面41V由设置于操纵室10内的显示装置40显示,但也可以由与支援装置200及管理装置300中的至少一方连接的显示装置显示。其目的在于,使利用支援装置200的工作人员或利用管理装置300的管理人员能够视觉辨认与施工机械100的工作履历相关的信息。
在如上述那样的施工机械100的管理系统SYS中,施工机械100的控制器30也可以将与操作了起重磁铁开关65时的时刻及场所等相关的信息发送至支援装置200及管理装置300中的至少一方。此时,控制器30也可以将物体检测装置的输出及摄像装置80所拍摄的图像等中的至少一个发送至支援装置200及管理装置300中的至少一方。图像也可以是在起重磁铁6的励磁中所拍摄的多个图像。而且,控制器30也可以将和起重磁铁6的励磁中的与施工机械100的动作内容相关的数据、与施工机械100的姿势相关的数据及与工作附件的姿势相关的数据等中的至少一个相关的信息发送至支援装置200及管理装置300中的至少一方。其目的在于,使利用支援装置200的工作人员或利用管理装置300的管理人员能够获得起重磁铁6的励磁中的与施工机械100相关的信息。
如此,本发明的实施方式所涉及的施工机械100的管理系统SYS能够使管理人员及其他施工机械的操作人员等共享起重磁铁6的励磁中所获取的与施工机械100相关的信息。
本申请主张基于2018年7月27日于日本申请的日本专利申请2018-141350号的优先权,该日本专利申请的全部内容通过参考援用于本说明书中。
符号说明
1-下部行走体,1L-左侧行走用液压马达,1R-右侧行走用液压马达,2-回转机构,2A-回转用液压马达,3-上部回转体,4-动臂,5-斗杆,6-起重磁铁,7-动臂缸,8-斗杆缸,9-起重磁铁缸,10-操纵室,11-发动机,11a-交流发电机,11b-起动装置,14-主泵,14a-调节器,14G-液压泵,15-先导泵,16、16a-工作油管路,17-控制阀单元,25-先导管路,26-操作装置,26L-左操作杆,26R-右操作杆,29-操作压力传感器,30-控制器,40-显示装置,41-图像显示部,42-操作部,42a-照明开关,42b-刮水器开关,42c-窗清洗器开关,60-液压马达,61-切换阀,62-模式切换开关,63-发电机,64-电力控制装置,65-起重磁铁开关,65A-弱励磁按钮,65B-强励磁按钮,65C-释放按钮,66-磁力调节转盘,70-蓄电池,72-电装件,74-发动机控制装置,75-发动机转速调节转盘,80-摄像装置,80B-后摄像机,80L-左摄像机,80R-右摄像机,90-电磁阀,92-电磁阀,100-施工机械,200-支援装置,300-管理装置,S1-动臂角度传感器,S2-斗杆角度传感器,S3-起重磁铁角度传感器,S4-机身倾斜度传感器,S5-回转角速度传感器,S6a-压力传感器,S6b-压力传感器,S6c-压力传感器,S6d-压力传感器,S6e-压力传感器,S6f-压力传感器,S7-动臂缸行程传感器,S8-斗杆缸行程传感器,S9-起重磁铁缸行程传感器。
- 施工机械、施工机械的显示装置及施工机械的管理装置
- 施工机械及支援基于施工机械的作业的支援装置