一种智能车辆方向盘转角抑制系统
文献发布时间:2023-06-19 10:49:34
技术领域
本发明涉及车辆辅助转向的技术领域,更具体的说是涉及一种智能车辆方向盘转角抑制系统。
背景技术
自汽车诞生以来,随着经济时代的进步,人们的生活水平日益提高,家家户户都有能力购买私家汽车,而每年都有大量的因交通事故伤亡,且呈现逐年递增的趋势,交通事故频发的原因有危险驾驶以及个人操作不当等,至于危险驾驶包括酒驾、疲劳驾驶以及吸毒驾驶,这类情况的驾驶员发生事故时往往是危害自己的同时危害他人,而个人操作不当主要是由于车辆高速行驶的过程中,驾驶员在遇到紧急情况往往会急打方向盘,然而,现有的车辆方向盘与车前轮是通过机械结构联动的,驾驶员急打方向盘时转角很大,带动车前轮也偏转很大角度,从而致使车辆失控,造成交通事故。
发明内容
针对现有技术存在的不足,本发明的目的在于提供一种能够对方向盘转向进行调节和辅助的智能车辆方向盘转角抑制系统,用于克服现有技术中的上述缺陷。
为实现上述目的,本发明提供了如下技术方案:
一种智能车辆方向盘转角抑制系统,包括转向机构、控制器、传动机构以及车轮机构,所述转向机构包括方向盘、主动轴以及转角传感器,所述方向盘通过主动轴转动连接在转角传感器上,所述传动机构包括电机、传动杆、减速箱、从动轴以及联轴器,所述传动杆转动连接在减速箱和电机之间,所述电机驱动所述传动杆转动,所述从动轴转动连接在减速箱与联轴器之间,所述控制器分别与转角传感器以及电机电连接,所述车轮机构包括转向拉杆、两组转向节臂以及两组转向车轮,所述转向拉杆转动连接在联轴器上,两组所述转向节臂分别连接在转向拉杆两端,两组所述转向车轮分别转动连接在对应的转向节臂上,任一一组所述车轮上设有车速检测器;
所述智能车辆方向盘转角抑制系统还包括转角数据库,所述转角数据库包括若干方向盘转角数据信息,不同的所述方向盘转角数据信息对应不同的方向盘转动角度与方向盘转动速度,所述转角数据信息反映转向车轮转动的速度与方向盘角速度之间一一对应;
所述智能车辆方向盘转角抑制系统还包括方向盘转角处理模块以及控制模块;
所述方向盘转角处理模块,获取所述转角传感器检测到方向盘转角速度作为方向盘实际转角速度信息,获取所述车速检测器接收到转向车轮的转动速度作为智能车辆实际车速信息,根据智能车辆实际车速信息索引得到对应的方向盘角速度作为理论方向盘转角速度信息,根据方向盘实际转角速度信息与理论方向盘转角速度信息进行比较,若所述方向盘实际转角速度信息大于理论方向盘转角速度信息,则发出忽略信号,若所述方向盘实际转角速度信息小于理论方向盘转角速度信息,则发出采用信号;
所述控制模块,当获取到所述方向盘转角处理模块中的忽略信号时,则控制模块向电机发出第一转向命令以使所述电机以理论方向盘转角速度信息对两侧转向车轮进行转向,当获取到所述方向盘转角处理模块中的采用信号时,则控制模块向电机发出第二转向命令以使所述电机以方向盘实际转角速度信息对两侧转向车轮进行转向。
进一步的,所述传动杆上还设有扭矩传感器,所述控制模块获取所述扭矩传感器检测到传动杆的扭矩信息,根据扭矩信息得到输出转角速度作为转向车轮实际转角信号,当所述控制模块发出忽略信号时,则所述转向车轮实际转角信号与理论方向盘转角速度信息进行比较,若转向车轮实际转角信号与理论方向盘转角速度信息不同时,所述控制模块发出第一修正命令以使电机降低或增大功率,若转向车轮实际转角信号与理论方向盘转角速度信息相同时,所述控制模块发出第一正常工作命令以使电机继续工作,当所述控制模块发出采用信号时,则所述转向车轮实际转角信号与方向盘实际转角速度信息进行比较,若转向车轮实际转角信号与方向盘实际转角速度信息不同时,所述控制模块发出第二修正命令以使电机降低或增大功率,若转向车轮实际转角信号与方向盘实际转角速度信息相同时,所述控制模块发出第二正常工作命令以使电机继续工作。
进一步的,所述控制模块还获取电机自身发出的反馈转角速度作为的反馈转角信息,根据反馈转角信息与控制模块发出的转角速度信息进行比较,若反馈转角信息大于控制模块发出的转角速度信息,则控制模块向电机发出第一修订命令以使电机降低转速直至达到与转角速度信息相同,若反馈转角信息小于控制模块发出的转角速度信息,则控制模块向电机发出第二修订命令以使电机提高转速直至达到与转角速度信息相同,若反馈转角信息与控制模块发出的转角速度信息相同,则控制模块向电机发出继续工作命令。
进一步的,所述理论方向盘转角速度信息与智能车辆实际车速信息成反比。
进一步的,所述智能车辆方向盘转角抑制系统还包括胎压监测模块,所述胎压监测模块获取智能车辆正常行驶时转向车轮的最大承载胎压作为比对胎压信息,获取控制模块中的忽略信息或采用信息,获取智能车辆转角时转角方向一侧的转向车轮的胎压作为转向胎压信息,根据转向胎压信息与比对胎压信息进行比较,若所述转向胎压信息大于所述比对胎压信息时,则所述胎压监测模块发出减速命令以使智能车辆减速,若所述转向胎压信息小于所述比对胎压信息时,则所述胎压监测模块发出第三正常工作命令以使智能车辆正常转向。
进一步的,还包括多个车载环视摄像头以及多组超声雷达,多个所述车载环视摄像头分别设置在智能车辆四周,多组所述超声雷达分别设置在智能车辆四周;
智能车辆方向转角抑制系统还包括过程监控模块,所述过程监控模块获取多个车载环视摄像头拍摄的转向时智能车辆四周的图像信息作为第一图像信息,获取多组所述超声雷达测得的转向时智能车辆四周的障碍物距离作为第一距离信息,根据第一图像信息和第一距离信息计算智能车辆转向时与四周障碍物之间的实际距离,根据实际距离与智能车辆内设定的安全距离进行比较,若实际距离小于或等于安全距离,则所述过程监控模块发出转向正常信号,若实际距离大于安全距离,则所述过程监控模块发出警示命令。
进一步的,所述智能车辆方向盘转角抑制系统还包括警报模块,当所述警报模块获取到胎压监测模块中的减速命令或获取到过程监控模块中的警示命令时,所述警报模块发出警示信息以使智能车辆发出灯光与喇叭警示。
进一步的,所述智能车辆方向盘转角抑制系统还包括图像处理模块,获取过程监控模块中的第一图像信息,根据第一图像信息计算得到实际亮度值,根据实际亮度值与智能车辆内设的预设亮度值进行比较,若实际亮度值与预设亮度值相同,则发出图像正常信号,若实际亮度值与预设亮度值不同,则发出图像异常信号且计算出亮度补偿值,根据亮度补偿值调整实际图像信息的亮度。
与现有技术相比,本发明的有益效果:本发明将方向盘和传动机构之间的连接方式由传统的机械连接改为电气连接,通过判断在某种车速下的方向盘转动速度是否超过允许的角速度,来对超过阈值的方向盘角速度进行抑制,进而抑制方向盘的转角,当车速比较快时,及时驾驶员打方向的速度非常快,车辆实际执行的转角也不会很大,从而避免了驾驶员在车速很高时候猛打方向盘导致车辆出现侧翻的现象,保证了驾驶员和车辆在行驶过程中的安全性,另一方面,如果驾驶员有时候需要打方向盘到大转角,只要驾驶员转动方向盘的速度在允许的阈值内,那么车辆还是会执行方向盘真实的角度。
附图说明
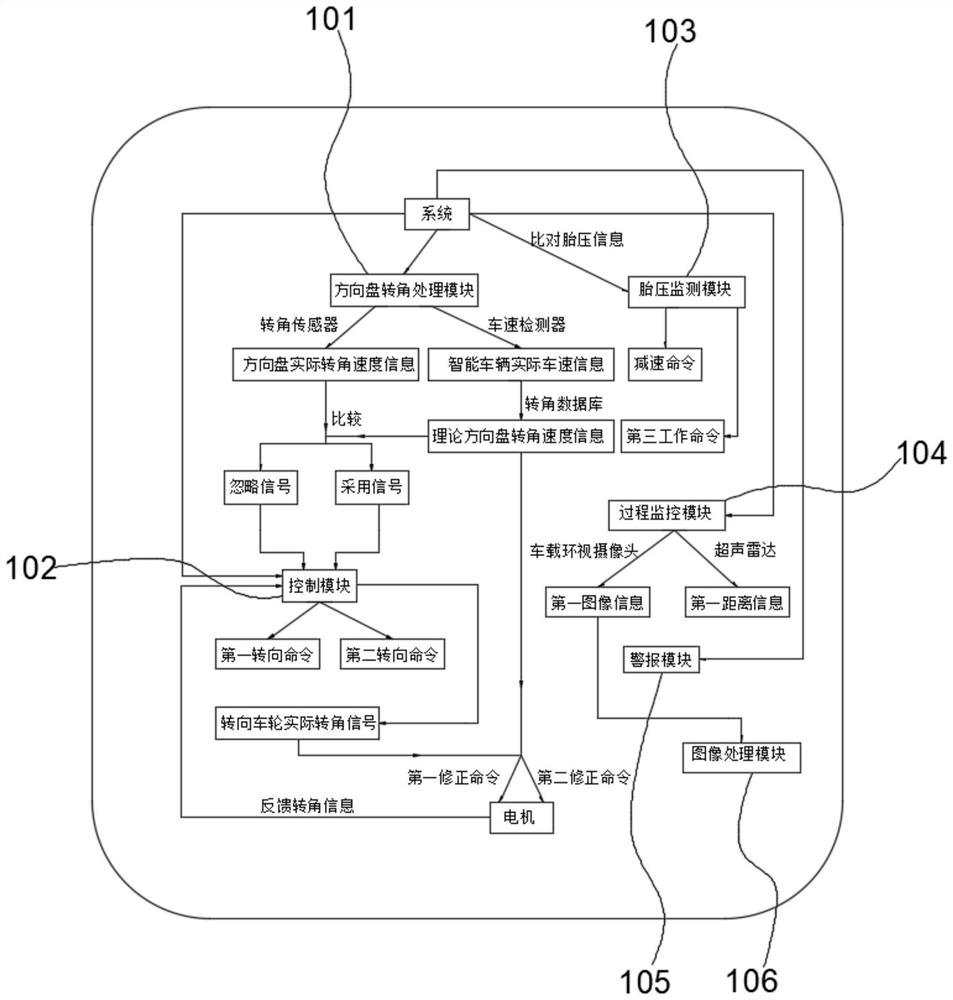
图1是本发明的控制关系图;
图2是本发明中的结构图。
附图标记:1、方向盘;2、主动轴;3、转角传感器;4、电机;5、传动杆;6、扭矩传感器;7、减速箱;8、从动轴;9、联轴器;10、转向拉杆;11、转向节臂;12、转向车轮;101、方向盘转角处理模块;102、控制模块;103、胎压监测模块;104、过程监控模块;105、警报模块;106、图像处理模块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
以下结合附图对本发明实施例做进一步详述:
由于目前现有的车辆方向盘1与车前轮是通过机械结构联动的,根据常识,如果车速很慢,方向盘1短时间内转动比较大的角度仍然是安全的;如果车速很快,方向盘1短时间内转动比较大的角度就比较危险,当车速达到一定值时,驾驶员急打方向盘1时转角很大,带动车前轮也偏转很大角度,从而致使车辆失控,造成交通事故,这类因为方向盘1转动角度过大而造成的事故可以通过智能车辆本身得到控制,但目前的智能无人驾驶或有人驾驶均是通过方向盘1直接对车轮转向进行控制,很容易造成转弯重心偏离而侧翻失控;因此本发明设计这种智能车辆方向盘转角抑制系统,具体结构如图2所示,包括转向机构、控制器、传动机构以及车轮机构,转向机构包括方向盘1、主动轴2以及转角传感器3,方向盘1通过主动轴2转动连接在转角传感器3上,传动机构包括电机4、传动杆5、减速箱7、从动轴8以及联轴器9,传动杆5转动连接在减速箱7和电机4之间,电机4驱动传动杆5转动,从动轴8转动连接在减速箱7与联轴器9之间,控制器分别与转角传感器3以及电机4电连接,车轮机构包括转向拉杆10、两组转向节臂11以及两组转向车轮12,转向拉杆10转动连接在联轴器9上,两组转向节臂11分别连接在转向拉杆10两端,两组转向车轮12分别转动连接在对应的转向节臂11上,任一一组车轮上设有车速检测器,本发明的智能车辆转向系统中方向盘1和前轮不再是直接通过机械结构联动,而是软连接,所谓的软连接指的是通过控制器实现信号的传输进行转向,此处不同于电助力转向,电助力转向虽然也是转向电机4收到转角信号带动转向轴转动,但本质上还是属于硬连接,即使电助力转向不工作,在转动方向盘1的时候前轮还是会偏转,只不过比较费劲而已。
如图1所示,智能车辆方向盘转角抑制系统还包括转角数据库,转角数据库包括若干方向盘转角数据信息,不同的方向盘转角数据信息对应不同的方向盘转动角度与方向盘转动速度,转角数据信息反映转向车轮12转动的速度与方向盘角速度之间一一对应,理论方向盘转角速度信息与智能车辆实际车速信息成反比,即设置允许的方向盘角速度与车速V的关系为反比例关系,其计算公式为,K为比例系数,当车速越快,则允许的方向盘角速度则需要越小;
智能车辆方向盘转角抑制系统还包括方向盘转角处理模块101以及控制模块102;
方向盘转角处理模块101,获取转角传感器3检测到方向盘转角速度作为方向盘实际转角速度信息,获取车速检测器接收到转向车轮12的转动速度作为智能车辆实际车速信息,根据智能车辆实际车速信息索引得到对应的方向盘角速度作为理论方向盘转角速度信息,根据方向盘实际转角速度信息与理论方向盘转角速度信息进行比较,若方向盘实际转角速度信息大于理论方向盘转角速度信息,则方向盘转角处理模块101发出忽略信号,若方向盘实际转角速度信息小于理论方向盘转角速度信息,则方向盘转角处理模块101发出采用信号;
控制模块102,当获取到方向盘转角处理模块101中的忽略信号时,则控制模块102向电机发出第一转向命令以使电机4以理论方向盘转角速度信息对两侧转向车轮12进行转向(方向盘实际转角速度信息为,如果,则控制模块102会忽略方向盘的实际转角速度,,即电机4接收到的信息是理论方向盘转角速度信息),当获取到方向盘转角处理模块101中的采用信号时,则控制模块102向电机发出第二转向命令以使电机4以方向盘实际转角速度信息对两侧转向车轮12进行转向(如果,则控制模块102会直接取为方向盘实际转角速度,,即电机4接收到的信息是方向盘实际转角速度信息),控制模块102用对时间进行积分得到方向盘1的转角,然后将转化为脉冲信号传递给电机4来驱动电机4转动。
传动杆5上还设有扭矩传感器6,控制模块102获取扭矩传感器6检测到传动杆5的扭矩信息,根据扭矩信息得到输出转角速度作为转向车轮12实际转角信号(扭矩信息是与传动杆5的扭力大小有关,扭力大小与电机4输出功率有关,所以为了使得转向车辆实际的转角速度进行检测是否与电机4收到的信息相同,通过扭矩传感器6来实现检测目的),当控制模块102发出忽略信号时,则转向车轮12实际转角信号与理论方向盘转角速度信息进行比较,若转向车轮12实际转角信号与理论方向盘转角速度信息不同时,控制模块102发出第一修正命令以使电机4降低或增大功率,若转向车轮12实际转角信号与理论方向盘转角速度信息相同时,控制模块102发出第一正常工作命令以使电机4继续工作,当控制模块102发出采用信号时,则转向车轮12实际转角信号与方向盘实际转角速度信息进行比较,若转向车轮12实际转角信号与方向盘实际转角速度信息不同时,控制模块102发出第二修正命令以使电机4降低或增大功率,若转向车轮12实际转角信号与方向盘实际转角速度信息相同时,控制模块102发出第二正常工作命令以使电机4继续工作。
控制模块102还获取电机4自身发出的反馈转角速度作为的反馈转角信息,根据反馈转角信息与控制模块102发出的转角速度信息进行比较,若反馈转角信息大于控制模块102发出的转角速度信息,则控制模块102向电机发出第一修订命令以使电机4降低转速直至达到与转角速度信息相同,若反馈转角信息小于控制模块102发出的转角速度信息,则控制模块102向电机4发出第二修订命令以使电机4提高转速直至达到与转角速度信息相同,若反馈转角信息与控制模块102发出的转角速度信息相同,则控制模块102向电机4发出继续工作命令,电机4也会反馈自身的转角信号,形成闭环控制,使得方向盘角度控制更加精确。
由于车辆在转向过程中速度过快或者转向过急时,车辆会严重偏向于转向一侧,稍为严重可能会导致车辆重心偏移而侧翻或者转向一侧车胎受压过大导致胎压骤升而爆胎,因此本系统还包括胎压监测模块103,胎压监测模块103获取智能车辆正常行驶时转向车轮12的最大承载胎压作为比对胎压信息(一般的智能车辆本身就具备车胎实时检测功能,且车辆有胎压范围值,当车胎胎压过高或过低车辆都会提示,因此一般车在行驶一段时间的胎压在2.3BAr-2.4BAr左右),获取控制模块102中的忽略信息或采用信息,获取智能车辆转角时转角方向一侧的转向车轮12的胎压作为转向胎压信息,根据转向胎压信息与比对胎压信息进行比较,若转向胎压信息大于比对胎压信息时,则胎压监测模块103发出减速命令以使智能车辆减速(由于车辆在换道转向或者弯道转向时,驾驶员会对情况进行一个预估,但预估的结果不一定是好的,驾驶员有时会在转向时不减速,因此当转向使得转向方向一侧的胎压过大发出减速命令,对车辆自动进行减速以保证安全),若转向胎压信息小于比对胎压信息时,则胎压监测模块103发出第三正常工作命令以使智能车辆正常转向。
以上表述适用与多种场景的转向,如弯道转向、换道转向或者突然躲避障碍物转向等场景,其手段均是通过判断在某种车速下的方向盘转动速度是否超过允许的角速度,来对超过阈值的方向盘角速度进行抑制,进而抑制方向盘的转角,当车速比较快时,及时驾驶员打方向的速度非常快,车辆实际执行的转角也不会很大,从而避免了驾驶员在车速很高时候猛打方向盘导致车辆出现侧翻的现象,保证了驾驶员和车辆在行驶过程中的安全性,另一方面,如果驾驶员有时候需要打方向盘1到大转角,只要驾驶员转动方向盘1的速度在允许的阈值内,那么车辆还是会执行方向盘1真实的角度。
由于车辆在转弯过程中,驾驶员对车辆转向时存在一定的预估的,但预估还是会存在危险,既便于转向的角速度受到抑制,但难免会发生因为抑制而导致与周边的障碍物碰撞造成事故,因此本系统还包括多个车载环视摄像头以及多组超声雷达,多个车载环视摄像头分别设置在智能车辆四周,多组超声雷达分别设置在智能车辆四周;
由于一般的智能车辆本身就具备车载环视摄像头以及超声雷达,且车辆本身就会对距离进行提示,也会自定设置一个安全距离,当车辆与障碍物的距离小于安全距离后,车辆会进行警示,但种距离监控只应用于倒车或靠边停车等场景,对于行驶过程中还未有过程的监控智能车辆方向转角抑制系统还包括过程监控模块104,过程监控模块104获取多个车载环视摄像头拍摄的转向时智能车辆四周的图像信息作为第一图像信息,获取多组超声雷达测得的转向时智能车辆四周的障碍物距离作为第一距离信息,根据第一图像信息和第一距离信息计算智能车辆转向时与四周障碍物之间的实际距离(由于超声雷达对中大型障碍物的检测比较精准,对于小型障碍物如果没有反射回信号则检测不到,因此需要通过图像拍摄进行分析读取是否有小型障碍物,然后根据拍摄的小型障碍物的分辨率以及大小进行分析距离,如是大型障碍物,则根据图像与雷达的双重检测进行距离的计算),根据实际距离与智能车辆内设定的安全距离进行比较,若实际距离小于或等于安全距离,则过程监控模块104发出转向正常信号,若实际距离大于安全距离,则过程监控模块104发出警示命令。
还包括警报模块105,当警报模块105获取到胎压监测模块103中的减速命令或获取到过程监控模块104中的警示命令时,警报模块105发出警示信息以使智能车辆发出灯光与喇叭警示。
还包括图像处理模块106,获取过程监控模块104中的第一图像信息,根据第一图像信息计算得到实际亮度值,根据实际亮度值与智能车辆内设的预设亮度值进行比较,若实际亮度值与预设亮度值相同,则发出图像正常信号,若实际亮度值与预设亮度值不同,则发出图像异常信号且计算出亮度补偿值,根据亮度补偿值调整实际图像信息的亮度。
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种智能车辆方向盘转角抑制系统
- 一种车辆方向盘转角的调整方法及系统、车辆