一种基于深度学习的污水处理曝气智能控制方法及系统
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及污水处理技术领域,特别是涉及一种基于深度学习的污水处理曝气智能控制方法及系统。
背景技术
污水处理行业属于能源消耗量大,其消耗能源主要是电能以及化学药剂。生物处理方法是现代污水处理应用中最为广泛的一种方法,其系统作为污水处理厂的核心单元,承担着去除污水中有机污染物质的任务。污水处理厂的曝气处理系统运行所需的电能消耗大约占整厂所需能耗的50%~70%。因此,对污水处理厂生物处理环节的曝气系统进行优化改造,提升其稳定性和利用效率,是污水处理厂达到出水标准的要求和节能降耗的需求所在。
当前污水处理曝气环境控制方法大部分采用手动PID控制或人工经验控制,控制精度低,污水生物处理系统是一个多变量复杂生物、化学和物理相变体系,多变量间相互作用,呈现非线性强耦合关系,体系十分复杂。其中曝气控制系统具有多变量强耦合、强非线性相关、难以在线监测、不确定性、时变性、时滞性、大惯性等特点。传统的污水处理曝气控制系统受制于硬件参数,导致控制器难以处理大量复杂的污水处理现场实时数据。
如何降低污水处理过程中的能源消耗、稳定出水水质、提高污水处理效率成为一个亟待解决的技术问题。
发明内容
本发明的目的是提供一种基于深度学习的污水处理曝气智能控制方法及系统,以降低污水处理过程中的能源消耗、稳定出水水质、提高污水处理效率。
为实现上述目的,本发明提供了如下方案:
一种基于深度学习的污水处理曝气智能控制方法,所述智能控制方法包括如下步骤:
建立GRU神经网络模型;
采集不同工况下的污水处理系统的进水端和出水端的水质参数、各个反应池内的水质参数和泥质参数、污水处理系统的运行参数及鼓风机运行参数,作为训练输入向量;
确定不同工况下的最优曝气量,作为不同训练输入向量对应的最优曝气量;所述最优曝气量为使出水端的水质参数满足污水处理排放要求的条件下的最小曝气量;
建立包括训练输入向量及训练输入向量对应的最优曝气量的训练集;
利用所述训练集训练所述GRU神经网络模型,获得训练后的GRU神经网络模型;
采集当前工况下的污水处理系统的进水端和出水端的水质参数、各个反应池内的水质参数和泥质参数、污水处理系统的运行参数及鼓风机运行参数,建立监测数据向量;
将所述监测数据向量输入训练后的GRU神经网络模型,获得当前工况下的最优曝气量;
根据当前工况下的最优曝气量进行曝气控制。
可选的,所述确定不同工况下的最优曝气量,具体包括:
在第i种工况下,调整鼓风机的转速,监测在不同转速下的鼓风机的曝气量和出水端的水质参数,确定使出水端的水质参数满足污水处理排放要求的条件下的最小曝气量,作为第i种工况下的最优曝气量。
可选的,所述根据当前工况下的最优曝气量进行曝气控制,具体包括:
根据鼓风机转速、风压与鼓风机的曝气量之间的关系,确定当前工况下的最优曝气量和当前工况下的实际曝气量的差值对应的鼓风机转速调整值;
将所述鼓风机转速调整值输入鼓风机控制系统中用于控制鼓风机转速的PID控制器,进行曝气量控制。
可选的,所述GRU神经网络模型包括更新门和重置门。
一种基于深度学习的污水处理曝气智能控制系统,所述智能控制系统包括:
模型建立模块,用于建立GRU神经网络模型;
训练参数采集模块,用于采集不同工况下的污水处理系统的进水端和出水端的水质参数、各个反应池内的水质参数和泥质参数、污水处理系统的运行参数及鼓风机运行参数,作为训练输入向量;
最优曝气量确定模块,用于确定不同工况下的最优曝气量,作为不同训练输入向量对应的最优曝气量;所述最优曝气量为使出水端的水质参数满足污水处理排放要求的条件下的最小曝气量;
训练集建立模块,用于建立包括训练输入向量及训练输入向量对应的最优曝气量的训练集;
模型训练模块,用于利用所述训练集训练所述GRU神经网络模型,获得训练后的GRU神经网络模型;
数据监测模块,用于监测当前工况下的污水处理系统的进水端和出水端的水质参数、各个反应池内的水质参数和泥质参数、污水处理系统的运行参数及鼓风机运行参数,建立监测数据向量;
最优曝气量预测模块,用于将所述监测数据向量输入训练后的GRU神经网络模型,获得当前工况下的最优曝气量;
控制模块,用于根据当前工况下的最优曝气量进行曝气控制。
可选的,所述最优曝气量确定模块,具体包括:
最优曝气量确定子模块,用于在第i种工况下,调整鼓风机的转速,监测在不同转速下的鼓风机的曝气量和出水端的水质参数,确定使出水端的水质参数满足污水处理排放要求的条件下的最小曝气量,作为第i种工况下的最优曝气量。
可选的,所述控制模块,具体包括:
鼓风机转速调整值确定子模块,用于根据鼓风机转速、风压与鼓风机的曝气量之间的关系,确定当前工况下的最优曝气量和当前工况下的实际曝气量的差值对应的鼓风机转速调整值;
PID控制子模块,用于将所述鼓风机转速调整值输入鼓风机控制系统中用于控制鼓风机转速的PID控制器,进行曝气量控制。
可选的,所述GRU神经网络模型包括更新门和重置门。
根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明提供一种基于深度学习的污水处理曝气智能控制方法及系统,所述智能控制方法包括如下步骤:建立GRU神经网络模型;采集不同工况下的污水处理系统的进水端和出水端的水质参数、各个反应池内的水质参数和泥质参数、污水处理系统的运行参数及鼓风机运行参数,作为训练输入向量;确定不同工况下的最优曝气量,作为不同训练输入向量对应的最优曝气量;建立包括训练输入向量及训练输入向量对应的最优曝气量的训练集;利用所述训练集训练所述GRU神经网络模型,获得训练后的GRU神经网络模型;采集当前工况下的污水处理系统的进水端和出水端的水质参数、各个反应池内的水质参数和泥质参数、污水处理系统的运行参数及鼓风机运行参数,建立监测数据向量;将所述监测数据向量输入训练后的GRU神经网络模型,获得当前工况下的最优曝气量;根据当前工况下的最优曝气量进行曝气控制。本发明利用GRU神经网络模型确定当前工况下的最优曝气量(使出水水质满足要求的前提下最小曝气量),利用最优曝气量进行曝气控制,降低了污水处理过程中的能源消耗并稳定了出水水质,而且本发明利用GRU神经网络模型确定最优曝气量,无需复杂运算,提高了污水处理效率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
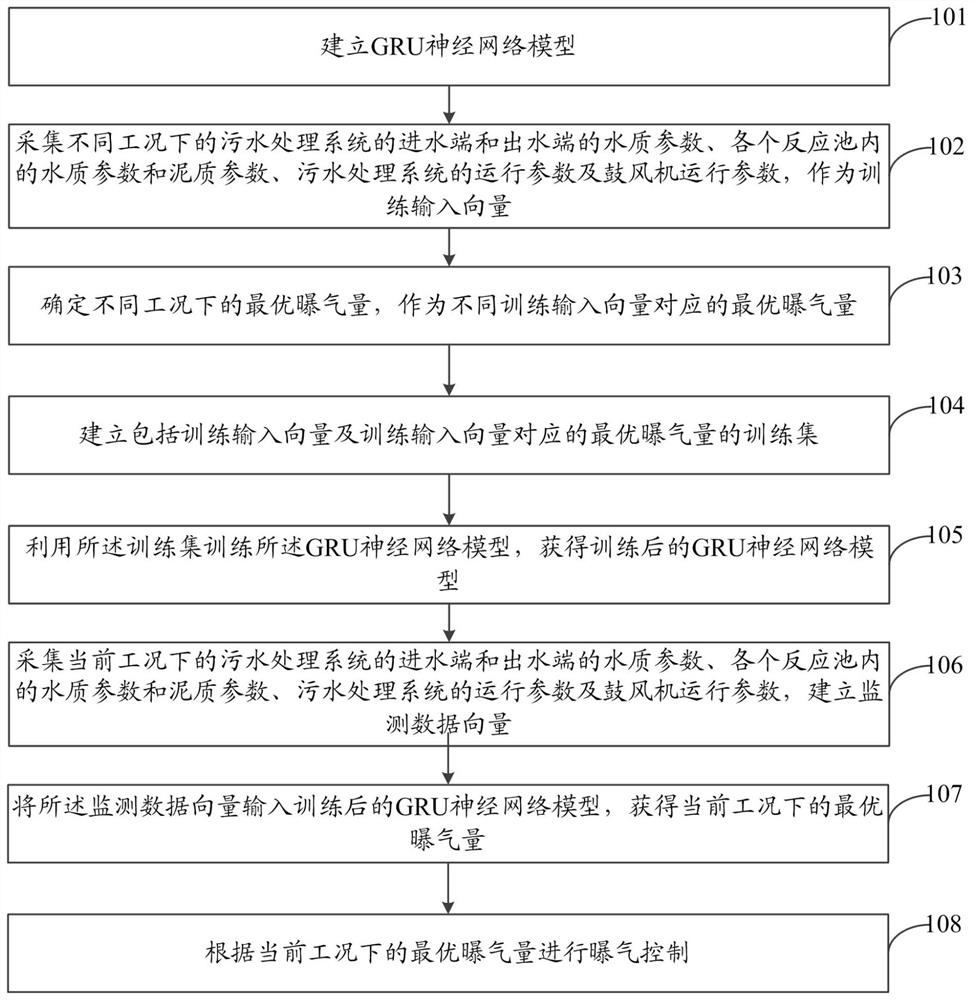
图1为本发明提供的一种基于深度学习的污水处理曝气智能控制方法的流程图;
图2为本发明提供的一种基于深度学习的污水处理曝气智能控制方法的原理图;
图3为本发明提供的GRU神经网络模型的结构图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种基于深度学习的污水处理曝气智能控制方法及系统,以降低污水处理过程中的能源消耗、稳定出水水质、提高污水处理效率。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
如图1和2所示,本发明提供一种基于深度学习的污水处理曝气智能控制方法,所述智能控制方法包括如下步骤:
步骤101,建立GRU神经网络模型。
本发明使用GRU(Gated Recurrent Unit,门控循环单元)作为深度神经网络确定最优曝气量。
长短期记忆网络LSTM((Long Short-Term Memory)能够解决循环神经网络RNN(Recurrent Neural Network)无法很好处理远距离依赖的问题,而GRU是LSTM的一个变体,GRU保持了LSTM的效果同时又使结构更加简单。GRU只保留了两个门,即更新门和重置门。更新门用于控制前一时刻的状态信息被代入到当前状态的程,更新门的值越大说明前一时刻的状态信息带入越多。重置门用于控制忽略前一时刻的状态信息的程度,重置门的值越小说明忽略得越多。
在时间步t,使用以下公式计算更新门z
z
其中x
r
y
其中,z
步骤102,采集不同工况下的污水处理系统的进水端和出水端的水质参数、各个反应池内的水质参数和泥质参数、污水处理系统的运行参数及鼓风机运行参数,作为训练输入向量;
本发明利用多路多参数在线传感器,在线监测污水处理系统的进水端、出水端以及各个反应池内的水质参数信息和泥质参数信息;所述在线传感器包括水质传感器和泥质传感器,用于实时监测水质和泥质的动态变化;所述水质传感器为多路多参数快速水质传感器,包括流量计、在线温度计、在线液位计、在线pH计、在线ORP测试仪、在线悬浮物浓度计、在线DO仪、在线COD仪、在线总氮仪、在线氨氮仪、在线总磷仪;所述泥质传感器为在线污泥浓度仪。
所述水参数和泥质参数信息包含参数因污水处理端口而异,其中:进水端参数信息包括流量、温度、pH、ORP、SS、COD、DO、TN、氨氮、TP;厌氧/缺氧反应器(反应池)参数信息包括流量、温度、pH、ORP、SS、COD、DO、TN、氨氮、TP、MLSS;好氧反应器(反应池)参数信息包括流量、温度、液位、pH、ORP、SS、COD、DO、TN、氨氮、TP、MLSS;二沉池参数信息包括流量、温度、液位、pH、ORP、SS、COD、TN、氨氮、TP;出水端参数信息包括流量、pH、ORP、SS、COD、TN、氨氮、TP。
将采集的水质参数信息和泥质参数信息传送至鼓风机房控制系统;鼓风机房控制系统用于控制鼓风机,鼓风机用于向生化反应器(反应池)内提供空气;所述风机出口主管道设有压力仪表和流量计,以实时监测鼓风机运行参数,包括鼓风机转速参数、风量(曝气量)参数以及风压参数。
鼓风机房控制系统将接收的水质参数信息、泥质参数信息及鼓风机运行参数信息发送至主控工作站,另外主控工作站可以获取污水厂其它运行数据,包括进水C/N比、HRT、SRT、污泥回流比以及混合液回流比。
步骤103,确定不同工况下的最优曝气量,作为不同训练输入向量对应的最优曝气量。
步骤103所述确定不同工况下的最优曝气量,具体包括:在第i种工况下,调整鼓风机的转速,监测在不同转速下的鼓风机的曝气量和出水端的水质参数,确定使出水端的水质参数满足污水处理排放要求的条件下的最小曝气量,作为第i种工况下的最优曝气量。
步骤104,建立包括训练输入向量及训练输入向量对应的最优曝气量的训练集;
步骤105,利用所述训练集训练所述GRU神经网络模型,获得训练后的GRU神经网络模型。
主控工作站利用接收的水质参数、泥质参数、鼓风机运行参数以及污水厂其他运行参数信息进行结构化、归一化处理,构建GRU神经网络模型进行训练,获得用于污水处理曝气智能控制的训练后的GRU神经网络模型。
本发明在模型训练前,对训练集中的水质参数、泥质参数、鼓风机运行参数以及污水厂其他运行参数信息进行结构化、归一化处理,以获得高质量的数据集。按照8:1:1的比例将数据划分为训练集、验证集、测试集,构建深度神经网络进行训练,获得监测数据与可控参数间的关联模型,具体指水质参数、泥质参数、运行参数与鼓风机运行参数信息的耦合模型,从而进一步得到用于污水处理曝气智能控制的曝气量预测及鼓风智能控制的训练后的GRU神经网络模型,该模型能够通过当前监测数据,实时计算出当前最高效、最节能的曝气量。
本发明在模型训练过程中使用Dropout进行正则化处理,获得训练后的GRU神经网络模型,用于进行最优曝气量预测,将所述训练后的GRU神经网络模型安装到算法控制器中,以使所述算法控制器根据实时监测的参数信息计算污水处理曝气控制系统优化曝气量,进一步计算优化鼓风机转速,并将所计算结果反馈给风机,所述风机根据反馈调节风机转速到优化转速,从而实现曝气量智能控制。
步骤106,采集当前工况下的污水处理系统的进水端和出水端的水质参数、各个反应池内的水质参数和泥质参数、污水处理系统的运行参数及鼓风机运行参数,建立监测数据向量。
步骤107,将所述监测数据向量输入训练后的GRU神经网络模型,获得当前工况下的最优曝气量;
步骤108,根据当前工况下的最优曝气量进行曝气控制。
步骤108所述根据当前工况下的最优曝气量进行曝气控制,具体包括:根据鼓风机转速、风压与鼓风机的曝气量之间的关系,确定当前工况下的最优曝气量和当前工况下的实际曝气量的差值对应的鼓风机转速调整值;将所述鼓风机转速调整值输入鼓风机控制系统中用于控制鼓风机转速的PID控制器,进行曝气量控制。
本发明并将训练后的GRU神经网络模型安装到位于污水处理厂的算法控制器中,以使算法控制器根据水质参数、泥质参数以及污水厂运行参数计算最优曝气量,然后计算鼓风机转速,并将所计算结果反馈给位于鼓风机房的鼓风机房控制系统,鼓风机房控制系统根据反馈信号,基于PID控制算法,调节转速从而实现曝气量的控制。
在本发明提供的基于深度学习的污水处理曝气智能控制中,所述水质参数包括流量、温度、液位、pH、ORP、SS、COD、DO、TN、氨氮、TP;所述泥质参数为MLSS;所述鼓风机运行参数包括鼓风机转速参数、风量参数以及风压参数;所述污水厂其它运行参数包括进水C/N比、HRT、SRT、污泥回流比以及混合液回流比。
在本发明提供的基于深度学习的污水处理曝气智能控制中,所述算法控制器根据水质参数计算污水处理曝气控制系统的最优曝气量,并将实际曝气量与较优曝气量相比较计算得到实际需要调控的风机转速,生成控制模块调控指令。
本发明还提供一种基于深度学习的污水处理曝气智能控制系统,所述智能控制系统包括:
模型建立模块,用于建立GRU神经网络模型;所述GRU神经网络模型包括更新门和重置门。
训练参数采集模块,用于采集不同工况下的污水处理系统的进水端和出水端的水质参数、各个反应池内的水质参数和泥质参数、污水处理系统的运行参数及鼓风机运行参数,作为训练输入向量;
最优曝气量确定模块,用于确定不同工况下的最优曝气量,作为不同训练输入向量对应的最优曝气量。
所述最优曝气量确定模块,具体包括:最优曝气量确定子模块,用于在第i种工况下,调整鼓风机的转速,监测在不同转速下的鼓风机的曝气量和出水端的水质参数,确定使出水端的水质参数满足污水排放处理要求的条件下的最小曝气量,作为第i种工况下的最优曝气量。
训练集建立模块,用于建立包括训练输入向量及训练输入向量对应的最优曝气量的训练集;
模型训练模块,用于利用所述训练集训练所述GRU神经网络模型,获得训练后的GRU神经网络模型;
数据监测模块,用于监测当前工况下的污水处理系统的进水端和出水端的水质参数、各个反应池内的水质参数和泥质参数、污水处理系统的运行参数及鼓风机运行参数,建立监测数据向量;
最优曝气量预测模块,用于将所述监测数据向量输入训练后的GRU神经网络模型,获得当前工况下的最优曝气量;
控制模块,用于根据当前工况下的最优曝气量进行曝气控制。
所述控制模块,具体包括:鼓风机转速调整值确定子模块,用于根据鼓风机转速、风压与鼓风机的曝气量之间的关系,确定当前工况下的最优曝气量和当前工况下的实际曝气量的差值对应的鼓风机转速调整值;PID控制子模块,用于将所述鼓风机转速调整值输入鼓风机控制系统中用于控制鼓风机转速的PID控制器,进行曝气量控制。
根据本发明提供的具体实施例,本发明公开了以下技术效果:
1、本发明对反应器水质参数、泥质参数、鼓风机运行参数进行实时检测与传输,将深度学习融入到污水处理曝气智能控制中,实现了污水处理生化段的精准曝气预测及控制,大大弥补了污水处理系统的多变量强耦合、强非线性相关、强时变性、时滞性等缺陷;
2、本发明有效提高了曝气量的控制精度,解决了现有污水处理曝气技术因无法精准曝气导致的能耗大、成本高等问题;
3、本发明保证了污水处理生化工艺段的高效稳定运行,保障了出水BOD、COD、氨氮等水质指标稳定达标;
4、本发明实现了污水处理的高效性、低耗能、低成本。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 一种基于深度学习的污水处理曝气智能控制方法及系统
- 一种基于深度学习与云计算的污水处理控制方法及其系统