一种基于双目视觉的光学跟踪器及跟踪系统
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及双目光学跟踪器领域,具体涉及一种通过双目光学跟踪器读取标记物,并且通过两幅图像中的标记物的特点识别出标记物,然后计算出标记物的空间坐标。
背景技术
双目视觉定位原理是基于两视觉相机的视差,类似人的双眼看空间物体的原理。将两个摄像头以一定的距离和角度固定在同一刚体上,工作时,两个摄像头分别获取在各自视场范围内同一特征点的映射图像,通过光学镜头成像模型和两个相机的相对位置就可以计算出该特征点的空间的位置。
目前双目视觉跟踪可应用于多个技术领域,如医疗手术机器人导航、精密工业测量、虚拟现实场景重建、物体识别等。尤其是在医疗领域,可以动态的跟踪到病灶的位置和外科手术器材的位置,为医学导航系统提供精准的定位。
为了跟踪物体的移动,需要在物体上固定标记物,现有光学系统识别的标记物是被动反光小球或者主动反光小球,需要制作特定的支架固定到目标物体上,不仅制造周期长,安装不容易,而且占用空间大,在某些场景下不适用。另外传统的测量和定位主要跟踪位置的移动,而没有获取物体的旋转。
发明内容
为了解决上述问题,本发明的目的是提供一种基于双目视觉的光学跟踪器及跟踪系统;
为了实现上述目的,本发明所采用的的技术方案是:一种基于双目视觉的光学跟踪器,包括两组图像采集部件,两固定相机铝合金固定板,一固定基座,一主控电路板,两个滤光片,一定位激光器,一外壳。所述图像采集部件、固定板、固定基座和主控电路板设置在所述外壳中,所述固定板用于固定所述图像采集部件,并且和所述主控电路板设置在所述固定基座上,所述滤光片和定位激光器安装在所述外壳上。
所述图像采集部件包括一相机,一镜头,一红外灯环,一红外灯环固定架,一前置固定架,一用于遮挡红外灯环光线的挡光圈。所述相机和镜头按照工业标准接口装配,所述红外灯环中心轴和所述镜头中心轴重合,所述红外灯环固定架是传导系数高的材料,用于导热和固定红外灯环,所述前置固定架用于压紧所述滤光片。
所述铝合金固定板用于所述相机所述固定基座连接,铝合金面积尽可能大,保证相机的温度稳定,所述基座为热涨冷缩系数低的材料制成,最后和所述外壳固定到一起。两相机之间距离越远,也就是视差越大,理论上计算的精度越高,考虑到实用性,装配好以后相机距离是0.2m-0.6m之间,两镜头的夹角在5度-20度之间。
所述主控电路板是读取相机图像数据并进行一系列的算法流程来实现系统的空间坐标算法,将结果传到上位机。
所述滤光片是过滤可见光,让所述红外灯环发出的红外光通过,所述滤光片可以安装到所述镜头前面,也可以安装到所述镜头和所述相机之间。
一种跟踪系统,包括一基于双目视觉的光学跟踪器,多个支架工具以及固定物。所述支架工具固定在所述固定物上,所述支架工具上设置有不少于三个不在同一条直线上的反光圆形贴片。
所述反光圆形贴片正面涂有可反射红外光的材料,背面涂有可粘贴到物体表面的不干胶;所述反光圆形贴片的直径在8mm-16mm之间。
与现有技术相比,本发明的有益效果是:
本发明提供的一种基于双目视觉的光学跟踪器及跟踪系统,采用了圆形反光贴片,在不降低定位精度情况下,易于加工和粘贴,大大节省了时间和成本,由于占用空间小,适用场景广。
附图说明
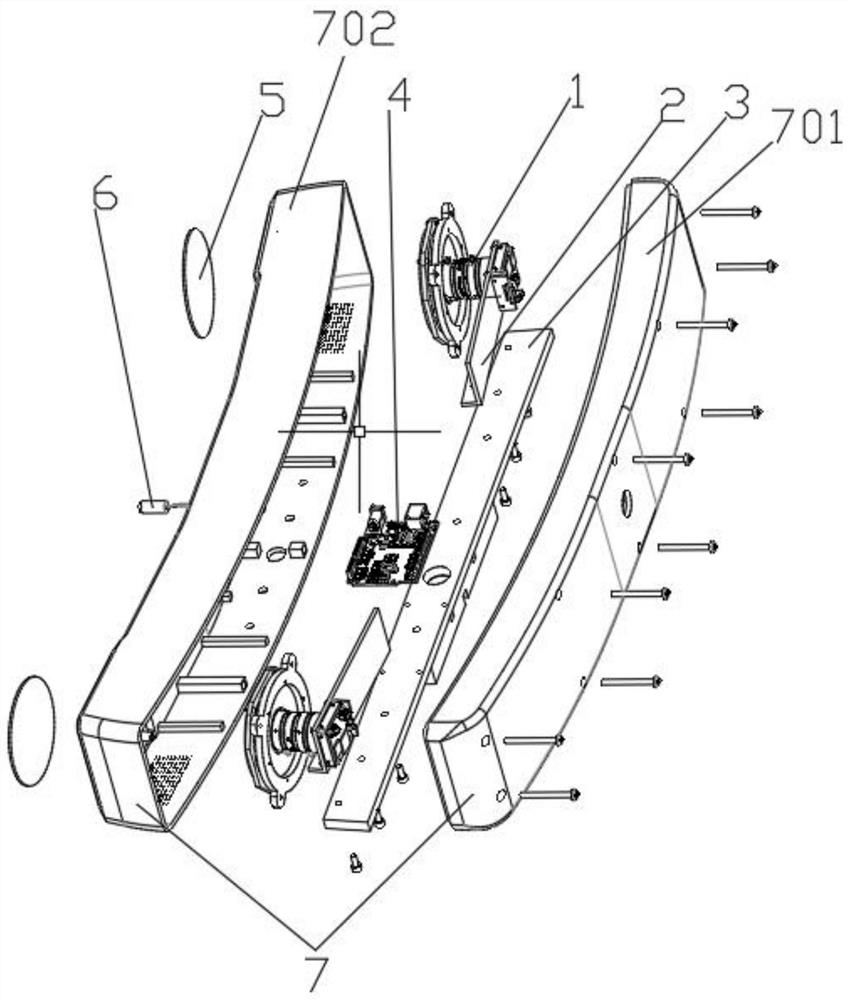
图1为本发明光学跟踪器的爆炸图。
图2为本发明光学跟踪器的内部示意图。
图3为本发明的图像采集部件爆炸图。
图4为本发明光学跟踪器的整体外观示意图。
图5为本发明光学跟踪系统整体示意图。
图6为本发明反光贴片在光学跟踪系统中的成像示意图。
具体实施方式
下面结合附图对本发明做进一步的说明。
如图1-图4所示,本实例提供的双目视觉光学跟踪器,包含两组相机为主的图像采集部件1,两固定相机铝合金固定板2,一固定基座3,一主控电路板4,两个滤光片5,一定位激光器6和一外壳7;所述图像采集部件1、固定板2、固定基座3和主控电路板4设置在所述外壳7中,所述固定板2用于固定所述图像采集部件1,并且和所述主控电路板4设置在所述固定基座上3,所述滤光片5和定位激光器6安装在所述外壳7上。
其中图像采集部件1包括一相机101,一与所述相机101相匹配的镜头102,一红外灯环103,一用于固定所述红外灯环103的红外灯环固定架104,一与所述红外灯环固定架104相连接用于压紧所述滤光片5的前置固定架106和一用于遮挡所述红外灯环103光线的挡光圈105。
所述相机101和镜头102按照工业标准接口装配,红外灯环103中心轴和镜头102中心轴重合,红外灯环固定架104是传导系数高的材料用于导热和固定红外灯环,本实施例采用铝合金材料,前置固定架106用于压紧滤光片5。
本实施例设定的观察范围是在1.5-3m范围内,装配好以后两相机的距离是0.5m,两镜头的中心轴夹角14度。
所述基座3的材料选用选用的大理石,膨胀系数小,有效的保证了两相机的距离的准确性。
主控电路板4是读取相机图像数据并进行一系列的算法流程来实现系统的空间坐标算法,将结果传到上位机。
滤光片5是过滤可见光,让红外灯环103发出的红外光通过,滤光片可以安装到镜头前面,也可以安装到镜头和相机之间,本实施例安装到镜头前面,仅让红外光通过。
如图5所示本实施例的光学跟踪系统,包括一双目视觉跟踪器1001,多个预先定好的支架工具1002和固定物1003。所述支架工具1002固定在所述固定物1003上,所述支架工具1002上设置有不少于三个不在同一条直线上的反光圆形贴片8。
圆形反光贴片8,正面涂有可反射红外光的材料,便于本发明的双目视觉跟踪器采集到本发明的圆形反光贴片8的图像;背面涂有可粘贴到物体表面不干胶,方便粘贴到被跟踪物体的平面上;圆形反光贴片8的直径在8mm-16mm之间,12mm-14mm最佳,小于8mm不利于跟踪识别,大于16mm需要粘贴的面积比较大,不利于安装。
本实施例设置有4个圆形反光贴片,计算刚体的位姿变化时候,可以在预先定义好坐标系计算好4个圆形反光贴片的中心坐标,也可以用光学跟踪器记录下某一个位置的4个点的空间位置,然后运行到下一个位置,同样记下4个点的空间位置,通过刚体的转化公式,可计算出两个位置之间的空间变化矩阵。
本实施例光学跟踪系统的流程为,两红外灯环发出的红外线照到放置有圆形反光贴片物体上,圆形反光贴片反射光线通过滤光片以后在CCD中的成像如图6所示;通过椭圆拟合算法识别出两幅图椭圆的中心,再通过二维转三维算法计算出空间位置。
以上实施例仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明的权利要求书的保护范围之内。本发明未涉及的技术均可通过现有技术加以实现。
- 一种基于双目视觉的光学跟踪器及跟踪系统
- 一种基于微分跟踪器的光电跟踪系统控制方法