一种智慧式家庭厨房系统及其控制方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及智能厨房和智能控制技术领域,尤其涉及一种智慧式厨房系统及其控制方法。
背景技术
现代生产和科学技术的发展,自动化技术成为人们研究的热点。自动化是指机器设备、系统或过程在没有人或较少人的直接参与下,按照人的要求,经过自动检测、信息处理、分析判断、操纵控制,实现预期的目标的过程。自动化技术广泛用于工业、农业、医疗、服务和家庭等方面。
随着人们生活水平的提高,科学家将人工智能和自动化技术加入到家庭厨房的领域中,并研发出各种智能厨房设备,能够辅助人们在厨房中完成洗菜、简单烹饪和餐具的清洗等等一系列的自动化操作。但是这些设备都是独立工作的,需要人工分别进行控制,不能实现自主实现食材采购和制备、菜品自动烹饪、送餐以及餐具的自动清洗更换。
发明内容
本发明的目的在于提供一种智慧式家庭厨房系统,能够根据用户的点餐信息自动完成食材采购和制备、菜品烹饪、送餐以及餐具的自动清洗更换等功能,减少家庭厨房中人工参与过程,降低运行成本,提升用户体验。
本发明是通过以下技术方案来实现的:
一种智慧式家庭厨房系统,包括
中央控制中心,设置于家庭厨房,用于将家庭厨房设备发送的信息上传至服务器组,并接收服务器组的控制指令控制家庭厨房的各个设备,实现家庭厨房智能自动完成食材采购、制备、烹饪、送餐以及餐具的清洗更换;
服务器组,设置于家庭厨房,接收并存储中央控制中心或家庭厨房设备上传的信息,进行分析处理,根据分析处理结果向中央控制中心发送驱动指令,或向家庭厨房设备发送相应设备完成任务所需信息;
食材采购设备,被配置为根据用户点餐信息或家庭食谱采购菜品的装置,为家庭厨房的自动烹饪设备提供食材支持;
食材制备设备,被配置为根据分析历史用户点餐的菜品信息制备对应数量/种类的食材的装置,对相应的食材进行清洗、切装、并送入对应投料机构内,用于为家庭厨房的自动烹饪设备提供投料支持;
自动烹饪设备,被配置为根据用户点餐信息或家庭食谱完成食物的取材、烹饪及装盘装置;
自动送餐设备,被配置为接收中央控制中心控制指令,到达指定地点取餐并将菜品送达用户的用餐地点装置;
餐具自动清洗、更换设备,被配置为接收中央控制中心控制指令,完成餐具收捡、清洗、分类以及摆放的装置。
进一步的,所述的服务器组包括运算服务器、订单服务器、菜谱服务器;所述运算服务器对获取的点餐信息/食谱信息进行解析生成驱动指令并发送至中央控制中心 所述订单服务器获取点餐信息并将该点餐信息发送至运算服务器,获取点餐信息包括通过接收用户终端发送的用户点餐信息或餐厅点餐信息,或者订单服务器根据历史用户订单数据/点餐信息,生成预测的点餐信息; 所述菜谱服务器获取食谱信息并将该食谱信息发送至运算服务器,获取食谱信息包括通过接收用户终端编辑发送的菜品需求信息,或者为菜谱服务器存储并供用户选择的菜品种类信息。
进一步的,所述的食材采购设备包括车体和设置于车体上的机架,机架上设置有常温层、冷藏层和水箱层,车体上设置有控制器、交换机、无线通信模块、多个扫描雷达、超声波传感器和多个摄像头组,多个扫描雷达、超声波传感器和摄像头组的信号输出端均与交换机电连接,交换机的信号输出端与控制器电连接,控制器与无线通信模块电连接,车体内设置有驱动组件,控制器的信号输出端与驱动组件电连接;常温层上设置有伞架和舵机,伞架为多个U型架,U型架两端铰接于舵机上,通过舵机控制U型架旋转,多个U型架之间设置有篷布;冷藏层包括冰箱和制冷机组,冰箱下方设置有电动推拉杆,冰箱的门与电动推拉杆的一端铰接,电动推拉杆的另一端铰接于机架上;水箱层底部设置有水箱和两个电动推拉杆,水箱与两个电动推拉杆的一端铰接,电动推拉杆的另一端铰接与机架上,水箱上分别设置有进水口和出水口,出水口上设置有电磁阀,水箱上方设置有水箱盖,水箱盖与水箱之间通过弹簧铰链连接,在水箱盖与水箱闭合状态时弹簧铰链处于压缩状态并且水箱盖抵靠于水箱层顶部,以水箱层电动推拉杆的伸出方向为前方,水箱的前方设置有前门,前门顶部与水箱铰接,前门与水箱之间设置有电动推拉杆,水箱内设置有滤板,滤板前边与水箱前方底部铰接,滤板后边固定有拉线,水箱后方设置有舵机,拉线穿过水箱顶部并与舵机连接,水箱内还设置有液位传感器,液位传感器和电磁阀均与控制器电连接,在水箱内水量不足时自动行驶车能够自动补水,在水量过多时能够打开电磁阀自动放水;扫描雷达包括上层扫描雷达、中层扫描雷达和下层扫描雷达并且均位于同一侧,上层扫描雷达固定于位于常温层一侧,中层扫描雷达固定于位于水箱层一侧,下层扫描雷达位于车体的前侧;超声波传感器设置于冷藏层上并位于车头的一侧;摄像头组为双目摄像头,多个摄像头组均设置与常温层上并分别位于车体的前后左右四个方向上;水箱层底部设置有电池,电池与控制器、交换机、无线通信模块、多个扫描雷达、超声波传感器、多个摄像头组、驱动组件、多个电动推拉杆、多个电机、冰箱和制冷机组电连接,车体底部设置有充电座,控制器设置有电量监控程序,在电池电量不足时控制车移动到最近的充电处进行充电;驱动组件包括驱动电机和转向电机,驱动电机和转向电机分别与车体的驱动轮和转向轮连接;机架通过多个减震弹簧与车体连接,减震弹簧分别固定于车体的四个角上;控制器内设置有UWB跟随单元,使得无人车可以跟随前方的使用者行走。
进一步的,所述的食材制备设备包括洗菜/切菜装置、送菜装置,所述的洗菜/切菜装置用于对菜品进行清洗和加工处理,并连接无人灶台区域;所述的送菜装置用于对处理完毕的菜品运送至无人灶台区域进行烹饪,并将烹饪后的餐品进行配送。
进一步的,所述的洗菜/切菜装置包括第一驱动设备、第二驱动设备、切菜设备和清洗设备,其中,第一驱动设备接收驱动指令对清洗设备进行驱动,清洗设备对菜品进行清洗;第二驱动设备接收驱动指令对切菜设备进行驱动,切菜设备对菜品进行加工处理;所述的清洗设备包括洗菜盆、超声波发生器和臭氧发生器;所述的切菜设备,还包括视觉系统和刀具库;其中,所述的视觉系统用于识别菜品和定位菜品位置;所述的刀具库通过程序驱动对菜品进行分理或固定;所述的切菜设备通过运算服务器按照实际情况的切菜方式和路径进行自动计算。
进一步的,所述的送菜装置包括第三驱动设备和送菜设备;其中,所述的第三驱动设备接收驱动指令对送菜设备进行驱动;所述的送菜设备包括温控设备,所述温控设备通过设定温度阈值,对已出餐品的温度进行控制;所述的送菜设备通过订单服务器获取用户发送的点餐信息并向所述第三驱动设备发送送菜驱动指令。
进一步的,所述的自动烹饪设备包括主轴、底层、餐盘餐食放置层、烹饪层和抽油烟机,主轴安装在底层上,餐盘餐食放置层与烹饪层间设有清洗及食物半成品放置层,烹饪层与抽油烟机间还设有调料层,主轴内还设有中心烟道,餐盘餐食放置层、清洗及食物半成品放置层、烹饪层、调料层和抽油烟机均安装在主轴上;抽油烟机还包括烟管、食用油桶、电源进线口、水管进水口、燃气进气口、食用油泵、备用电池设备、风机、增压泵、底板和门板,风机安装在中心烟道上,烟管一端安装在风机上,另一端安装在门板上,食用油泵通过油管与食用油桶连接,增压泵与水管进水口连接,增压泵上还设有一个三通阀,备用电池设备安装在底板上,抽油烟机上还设有进风口及倒米装置,倒米装置包括米仓、提升机构、旋转下料口和直线滑轨,米仓上设有米仓盖,米仓外壁上还安装有称重传感器,旋转下料口安装在米仓底部,提升机构包括钢丝绳和轮子,钢丝绳和轮子旁还设有驱动电机,直线滑轨安装在主轴上;调料层包括提升机构、运动活塞、导轨、棘轮机构、固体及粉料调料加料斗、定齿轮、动齿轮和液体调料加料斗,提升机构安装在主轴上,提升机构与动齿轮间还设有定齿轮,固体及粉料调料加料斗安装在导轨上,棘轮机构安装在固体及粉料调料加料斗内,棘轮机构旁还设有驱动电机,液体调料加料斗内设有多个单向阀,运动活塞安装在液体调料加料斗下料口处,运动活塞旁还设有电磁推杆;烹饪层包括多个机械手、两个炒锅台面、平底锅台面、烤箱台面、电饭锅台面、电压力锅台面、动齿轮、定齿轮和多个电动推杆,炒锅台面、平底锅台面、电饭锅台面和电压力锅台面上均安装有一个机械手,两个炒锅台面均安装有灶具,烤箱台面上安装有烤箱,平底锅台面、电饭锅台面和电压力锅台面上均安装有电磁炉,电动推杆安装在炒锅台面上,定齿轮安装在主轴上,动齿轮与定齿轮互相啮合,炒锅台面、平底锅台面、电饭锅台面和电压力锅台面旁均设有电动推杆,炒锅固定在炒锅台面上,烹饪层顶部还安装有摄像头,机械手包括旋转关节、锅铲、轴承一和轴承二,旋转关节包括舵机旋转关节一、舵机旋转关节二、舵机旋转关节三、舵机旋转关节四、舵机旋转关节五和步进电机,轴承一安装在舵机旋转关节一上,舵机旋转关节一能够进行圆周360°旋转,舵机旋转关节二、舵机旋转关节三、舵机旋转关节四和舵机旋转关节五均可180°水平运动,锅铲和轴承二均安装在舵机旋转关节五上,机械手还内置有控制器;清洗及食物半成品放置层包括多个连杆机构、定齿轮、拖链、餐具放置清洗仓、锅盖清洗仓、动齿轮、多个餐食半成品仓、多个滑轨、多个电动推杆和漏油斗,拖链安装在主轴上,定齿轮与动齿轮互相啮合,餐具放置清洗仓上还设有清洗工具,每个餐食半成品仓内均安装有一个连杆机构,每个连杆机构底部均安装有一个电动推杆,每个电动推杆旁均安装有一个滑轨;餐盘餐食放置层包括多个餐盘放置板、定齿轮、拖链、动齿轮、电动推杆、多个连杆机构和多个滑轨,定齿轮安装在主轴上,动齿轮与定齿轮互相啮合,拖链安装在定齿轮上,每个餐盘放置板底部均安装有一个连杆机构,每个连杆机构底部均安装有一个电动推杆,每个电动推杆旁均安装有一个滑轨。
进一步的,所述的自动送餐设备包括多个配送设备;所述配送设备包括送餐机器人或送餐机器车,送餐机器人或送餐机器车用于接收中央控制中心指令,到达指定地点取餐并将菜品送达用餐地点。
进一步的,送餐机器人包括机器人壳体,用于保护送餐机器人内部结构,壳体内部结构包括基座和主体;基座顶部中心设置有固定轴,基座底部固定安装有支撑架,支撑架上设置有用于移动的行进装置,基座内部设置有电池和控制器,控制器与电池连接;主体通过轴承安装在基座的固定轴上,并通过滑轨与基座滑动连接,主体内部设置有电源层、酒水层、饮料层和餐具层,主体底部设置有连接控制器的轮毂电机,轮毂电机接收控制器发送的控制指令,驱动主体旋转;机械手,设置于主体上,用于取放餐具和食物;行进装置包括设置于支撑架内部的行进电机和传动机构,设置于支撑架底部的履带行走机构和辅助轮;辅助轮通过减震装置固定安装支撑架上;履带行走机构通过传动机构与行进电机连接;行进电机与控制器连接,接收控制器的控制指令,驱动履带行走机构实现送餐机器人的移动行进;送餐机器人还包括触摸显示屏,安装于主体的外壳上,与控制器连接,用于显示送餐机器人内部的饮料和食物信息,以及接收用户输入的控制指令,实现人机交互;主体内的电源层设置有电池层取出门,酒水层设置有酒水层左右滑移门,饮料层设置有饮料层左右滑移门;酒水层左右滑移门和饮料层左右滑移门均设置有电磁门锁和摩擦电机;电磁门锁与摩擦电机分别与控制器连接;送餐机器人还包括传感器,传感器与控制器连接,用于用户取出物品后计数;机械手包括齿轮齿条、滚珠丝杠和云台电机A,机械手通过齿轮齿条实现机械手的开合,通过云台电机实现机械手的远近伸缩;通过滚珠丝杠实现机械手的高低升降;机械手包括齿轮齿条、滚珠丝杠、云台电机A、云台电机B、小电机B、扭簧、小电磁铁和柔性机械手B,机械手通过齿轮齿条实现机械手的开合,通过云台电机实现机械手的远近伸缩;通过滚珠丝杠实现机械手的高低升降;机器人在抓取时通过云台电机A和云台电机B共同作用,控制机械手距餐盘的位置,电机动作通过模组控制机械手在高度方向上的位置;到达位置后,小电机B启动工作,通过齿轮齿条和小电磁铁联合控制柔性机械手B的开合,以便于抓取餐盘,扭簧角度自动调节以便于配合餐盘角度,使其完全贴合餐盘壁面来抓取物品;送餐机器人还包括平行翻折门和伸缩机构,平行翻折门与伸缩机构连接,安装于主体顶部,用于防止餐具层中的餐具掉落;伸缩机构与控制器连接,用于根据控制器发送的控制指令,打开或关闭平行翻折门;避障模块包括雷达、摄像头A和摄像头B,其中,雷达有两个,分别设置在行进装置的前后,与控制器连接,用于扫描采集机器人行进地面前后的图像信息;摄像头A设置在伸缩机构的下方,摄像头B设置在机械手侧面,摄像头A和摄像头B用于分别采集机器人行进前方和后方的环境信息,以及识别人体特征,控制器分别与摄像头A和摄像头B连接;避障模块还包括超声波传感器和碰撞传感器;超声波传感器识别障碍物的距离,用于辅助机器人避障;碰撞传感器,用于检测机器人是否碰撞行为,当检测到机器人突然产生碰撞时,控制机器人产生报警,提示产生碰撞。
进一步的,所述的餐具自动清洗、更换设备包括餐具收捡设备、餐具清洗设备和餐具存放设备;所述的餐具收捡设备用于清理餐桌,并将餐具放入餐具清洗设备,所述的餐具收捡设备还包括一个定位模块,用于对餐桌和餐桌上的待洗餐具进行定位;所述的餐具清洗设备用于分开清洗大件餐具和小件餐具,并将餐具放入餐具存放设备;所述的餐具存放设备用于存放清洗后的餐具,并将新餐具放在清洁后的桌面上进行摆盘;所述的家庭厨房餐具自动清洗、更换设备通过订单服务器获取已完成就餐用户的信息,通过解析信息,得到餐桌编号信息,并将餐桌编号信息解析为驱动指令发送至中央控制中心;。
进一步的,所述餐具收捡设备的定位模块包括一个摄像头识别设备、RFID卡阅读器和装有RFID卡的餐具;所述摄像头识别设备用于识别小件餐具和大件餐具;所述RFID卡阅读器读取对应餐具内设置的RFID卡,识别不同餐具的类型和大小。
进一步的,所述餐具清洗设备包括大件餐具清洗盘、网格状的筛选仓、小餐具清洗仓、垃圾处理仓、清洁自洗设备和设置有多自由度机械臂;所述的网格状的筛选仓包括一个高压水枪清洗装置和一个磁吸工具,第一高压水枪清洗装置将筛选后的小件餐具进行高压水枪冲洗,并将清洗后的垃圾通过筛选仓底部冲入垃圾处理仓;磁吸工具利用磁力将带有磁性的小餐具吸入小餐具清洗仓;所述大件餐具清洗盘包括第二高压水枪清洗设备、第一超声波清洗设备、第一清水清洗设备和第一紫外线烘干设备;所述的小餐具清洗仓,包括第三高压水枪清洗设备、第二超声波清洗设备、第二清水清洗设备和第二紫外线烘干设备;所述清洁自洗设备通过多自由度机械臂伸入水中和自身喷水的模式实现自洗。
进一步的,所述餐具存放设备设置有多自由度机械臂、第一存放仓和第二存放仓,多自由度机械臂把清洗后的餐具放入第一存放仓,并将第二存放仓内的餐具放在桌面进行摆盘,当第二存放仓内的餐具被多自由度机械臂取出后,第一存放仓内的餐具自动进入第二存放仓。
一种智慧式家庭厨房系统控制方法,包括以下步骤:
S1,家庭厨房的采购设备通过订单服务器接收用户终端提交的点餐信息并提交到菜谱服务器,菜谱服务器根据点餐信息获取用户家庭食谱信息并将该家庭食谱信息发送至运算服务器,运算服务器对获取的家庭食谱信息进行解析生成驱动指令并发送至中央控制中心,中央控制中心分发驱动指令至对应采购终端前往菜市按照家庭食谱进行食材采购,同时接受采购终端采集返还的食材信息与支付信息,并通过运算服务器完成食材的支付,采购终端在食材采购完毕后返回家庭厨房;
S2,家庭厨房的食材制备设备接收中央控制中心的驱动指令,分别驱动洗菜设备、切菜设备、送菜设备,完成食材的清洗、加工处理,以及将处理好的食材送往家庭厨房的烹饪设备;
S3,菜谱服务器根据用户订单的菜品信息向中央控制中心下发菜品烹饪指令,家庭厨房的烹饪设备接收中央控制中心的驱动指令后,驱动取材设备选取食材和调料,并通过烹饪设备完成菜品的自动烹饪,再通过装盘设备将烹饪好的菜品进行装盘,最后通过清洗设备对设备所有设备进行清洗并放回至原处;
S4,中央控制中心在菜品烹饪完成后向家庭厨房送餐设备下发取餐指令,家庭厨房送餐设备在接收到取餐指令后,驱动配送设备前往烹饪地点取餐,并将烹饪好的菜品送达用户用餐地点,同时通过机械臂和夹具将菜品摆放在餐桌上预设的碗盆摆放区域;
S5,用户用餐完毕之后通过中央控制中心向家庭厨房餐具自动清洗、更换设备发送餐具清洗指令,家庭厨房餐具自动清洗、更换设备在接收到指令后,首先通过餐具收捡设备清理餐桌上的餐具并送往设备的餐具清洗设备处,餐具清洗设备对餐具分类同完成对餐具清洁,然后将清洁过的餐具放入餐具存放仓,最后餐具清洗设备进行自洗,完成餐具的自动清洗、更换。
进一步的,还包括采购终端支付步骤,所述采购终端支付步骤包括以下子步骤:
S1,采购终端的支付设备通过条形扫码器采集采购的食材信息,同时通过二维码阅读器采集支付信息,并将采集食材信息和支付信息上传至中央控制中心;
S2,中央控制中心接收采购终端上传的信息并将信息提交运算服务器进行比对;
S3,运算服务器根据上传的食材信息分析计算不同食材采购数量对应的价格总和,然后将计算出来的价格总和同上传的支付信息的支付金额进行比对分析;
S4,若两者信息相符,运算服务器调用支付接口对采集的二维码信息对应的账户进行支付。
进一步的,还包括采购终端的食材采购步骤,所述食材采购步骤包括以下子步骤:
S11,通过用于家庭厨房的订单服务器获取订单信息,所述订单服务器获取订单信息并将该订单信息发送至运算服务器,获取订单信息包括通过接收用户终端APP发送的用户订单信息或餐厅点餐信息,或者订单服务器根据历史用户订单数据/点餐信息,生成预测的订单信息;
S12,解析订单信息/点餐信息,通过运算服务器对获取的订单信息/点餐信息进行解析,回去订单/点餐信息所需菜品信息;
S13,食材余量采集,通过设置于家庭厨房连接中央控制器的食材余量采集装置,采集订单信息/点餐信息中菜品对应食材的消耗速率以及剩余储量并发送中央控制中心;
S14,分发采购指令,中央控制中心接收食材余量采集装置上传的食材消耗速率以及剩余储量值发送给运算服务器,运算服务器根据内部设置存储的家庭厨房对应食材储量最低阈值以及食材消耗速率最高阈值,在食材消耗速率超过最高阈值时或在剩余储量值低于食材储量最低阈值时向中央控制中心下发对应食材的采购指令根据餐厅的食材剩余储量制定对应的食材采购数量,并向采购终端下发采购驱动指令;
S15,食材采购,通过包括运载设备以及设置于运载设备上的存储设备、食材信息采集装置以及支付设备的采购终端,接受中央控制中心下发的驱动指令,利用运载设备驱动采购终端前往菜市进行食材采购。
S16,收集采购信息,采购终端采集返还的食材信息与支付信息,并将该食材信息与支付信息发送至运算服务器进行分析比对;
S17,支付采购费用,运算服务器将采购的食材信息和支付信息进行比对,确认无误后调用支付接口向商家进行支付;
S18,食材存放,采购终端在完成食材采购后,按照原路线返回家庭厨房,通过多自由度机械臂将采购的食材从运载设备上取出,并放至餐厅的食材存放处。
进一步的,还包括食材制备步骤,所述食材制备步骤包括以下子步骤:
S21,分发洗菜指令,中央控制中心向洗菜设备发送驱动指令,对洗菜设备进行驱动;
S22,食材清洗,洗菜设备接收到下发的洗菜指令后,控制运载器将需要清洗的菜品从餐厅的食材存放处取出,放入洗菜盆内的菜篮子里,该洗菜盆顶部的案板自动关闭,盆内各喷头开始喷水,进行初步清洗工作,当洗菜设备检测到洗菜盆内充水量达到要求时,洗菜盆内的超声波发生器、臭氧发生器开始工作,同时洗菜盆内的菜篮子来回摆动,增强洗涤效果,直至清洗干净后程序自动关闭,并将清洗过的食材通过运载器送往切菜设备的案板上;
S23,分发制备指令,中央控制中心检测到洗菜设备完成食材清洗后,向切菜设备下发切菜驱动指令;
S24,食材制备,切菜设备接收到切菜指令后,通过视觉系统识别采集案板上的菜品信息及相应位置信息同时上传运算服务器,运算服务器根据程序指令及实际情况自动计算切菜方式及路径并发送至切菜设备,切菜设备接收到切菜方式及路径后,驱动刀具库内的刀具,按程序指令对菜品进行切菜;
S25,食材运送,中央控制中心检测到切菜设备完成切菜后,向送菜设备下发食材运送驱动指令,驱动送菜设备将制备好的食材从切菜设备的案板上取出,并送往家庭厨房的无人灶台处。
进一步的,还包括食材烹饪步骤,所述食材烹饪步骤包括以下子步骤:
S31,预设烹饪程序指令,运算服务器根据用户订单信息/点餐信息以及备注信息预设每种菜品的做法顺序,具体为设置灶台加热时间以及食材和调料的加入顺序,并将预设的烹饪程序指令发送至中央控制中心;
S32,选取食材和调料,中央控制中心根据预设的烹饪程序指令向取材设备下达烹饪驱动指令,驱动取材设备从无人灶台上选定用户订单菜品/点餐菜品所需的食材和调料,同时将食材和调料送往无人灶台烹饪设备处;
S33,烹饪菜品,烹饪设备将步骤S32中取得的食材和调料按照收到的驱动指令放入烹饪设备的锅中进行烹饪;
S34,菜品装盘,烹饪设备完成烹饪后,装盘设备按照驱动指令将乘装食物的器具从存放处送出,同时烹饪设备控制锅倾斜将烹饪好的菜品导入器具中,装盘设备通过机械臂上设置的摄像头检查锅中食物是否全部倒入乘装食物的器具中,若没有完全倒入,则利用锅铲将余下的食物铲入乘装食物的器具中,完成菜品装盘后烹饪设备的锅调整回原位置;
S35,设备清洗,中央控制中心在检测到菜品完成装盘后,向无人灶台的清洗设备发送设备清洗驱动指令,驱动清洗设备对取材设备、烹饪设备和装盘设备进行清洗,清洗完成后将所有设备放回原处。
进一步的,还包括自动送餐步骤,所述自动送餐步骤包括以下子步骤:
S41,下发取餐指令,中央控制中心检测到无人灶台完成菜品装盘后,向配送设备的送餐机器人或者送餐机器车下达取餐驱动指令;
S42,菜品取放,送餐机器人或送餐机器车在接收到取餐指令后,到达无人灶台的装盘处,通过机械臂和夹具将抓取装有菜品的器具并放置于碗盆固定区域;
S43,菜品配送,送餐机器人或送餐机器车通过运算服务器解析用户点餐信息,将菜品信息和用户餐桌号进行比对匹配后,得到用户的餐桌号并定位用户餐桌位置,将菜品送达用户地点;
S44,菜品摆放,送餐机器人或送餐机器车首先通过设置在机械臂上的摄像头获取餐桌上的图像信息,然后通过机械臂和夹具将菜品摆放在餐桌上预设的碗盆摆放区域,完成自动送餐;
S45,设备清洗,送餐机器人或送餐机器车完成送餐后返回家庭厨房的清洗设备处,同时中央控制中心驱动清洗设备对送餐机器人或送餐机器车进行清洗。
进一步的,还包括餐具自动清洗、更换步骤,所述餐具自动清洗、更换步骤包括以下子步骤:
S51,下发餐具收捡指令,中央控制中心通过订单服务器在确认用户用餐完毕离开餐桌,走出餐厅后,向餐具收捡设备发送驱动指令;
S52,收捡餐具,餐具收捡设备接收驱动指令后,通过定位模块感应餐桌位置,移动至待清理餐桌,智能扫描、并定位餐桌上的餐具,对餐桌和餐具进行统一收纳和清理,;
S53,餐具分类清洗,餐具清洗设备对餐具分类进行清洗处理,将大件餐具放入大件清洗盘,将小件餐具进行放入筛选仓筛选,分别进行清洗、消毒烘干;
S54,餐具分类存放,餐具存放设备对清洗过的餐具分别放置在不同餐具对应的存放仓,或将清洗过后的新餐具放在清洁后的桌面上进行摆盘;
S55,清洗设备自洁,餐具清洗设备还包括清洁自洗设备和设置有多自由度机械臂,通过多自由度机械臂将餐具清洗设备伸入水中和清洁自洗设备喷水的模式实现设备自洗,完成清洗设备自洁。
本发明的有益效果:本发明能根据用户的点餐信息按照用户的食谱分析出所需食材,并前往菜市采购回所需食材,并对采购的食材进行制备,同时对制备好的食材进行烹饪,然后将烹饪好的菜品送往用户的用餐地点,在用户确认用餐结束后对餐具收捡并进行分类清洗存放。通过本方案能实现家庭厨房的高自动化,提高了自动烹饪效率,减少了人工参与过程,降低了系统的运行成本,提升了用户体验。
附图说明
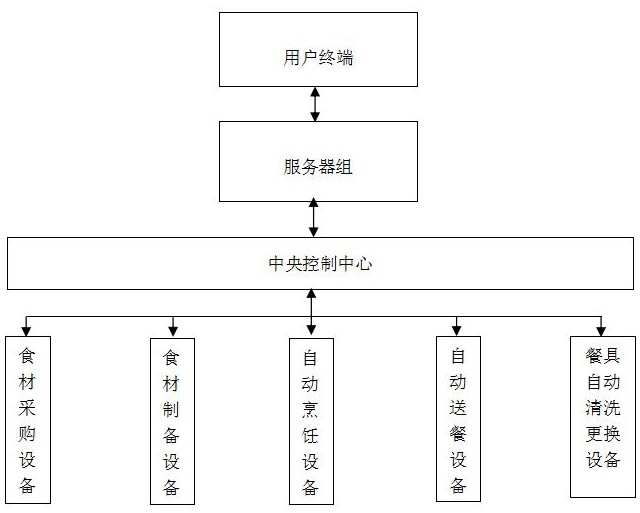
图1是本发明的系统原理图。
图2是本发明的方法流程图。
图3是本发明送餐机器人去掉壳体的内部设备结构图。
图4是本发明送餐机器人的主视图。
图5是本发明送餐机器人的侧视图。
图6是本发明送餐机器人的后视图。
图7是本发明送餐机器人的俯视图。
图8是本发明送餐机器人的内部电池层结构图。
图9是本发明送餐机器人的内部动力及支撑结构图。
图10是本发明送餐机器人的饮料层结构图。
图11是本发明送餐机器人的餐具层结构图。
图12是本发明送餐机器人的机械手结构图。
图13是本发明送餐机器人的避障的雷达及相机安装位置图。
图14为本发明食材采购设备的结构示意图。
图15为本发明食材采购设备水箱层的结构示意图。
图16为本发明食材采购设备车体的结构示意图。
图17为本发明食材采购设备机架框架部分的结构示意图。
图18为本发明食材采购设备常温层的结构示意图。
图19为本发明食材采购设备冷藏层的结构示意图。
图20为本发明的实施例烹饪设备的结构示意图;
图21为本发明的实施例烹饪设备的抽油烟机结构示意图;
图22为本发明的实施例烹饪设备的倒米装置结构示意图;
图23为本发明的实施例烹饪设备的调料层结构示意图;
图24为本发明的实施例烹饪设备的烹饪层俯视图;
图25为本发明的实施例烹饪设备的烹饪层剖视图;
图26为本发明的实施例烹饪设备的清洗及食物半成品放置层结构示意图;
图27为本发明的实施例烹饪设备沿B-B方向的剖视图;
图28为本发明的实施例烹饪设备的餐盘餐食放置层结构示意图;
图29为本发明的实施例烹饪设备的机械手的结构示意图
附图标记说明:1-履带行走机构、2-传动机构、3-酒水层、4-饮料层、5-餐具盘、6-餐具层、7-伸缩机构、8-触摸显示屏、9-平行翻折门、10-机械手、11-上下滑移门、12-饮料层左右滑移门、13-酒水层左右滑移门、14-电池层取出门、15-底部灯带、16-电池、17-轮毂电机、18-固定轴、19-滑轨、20-电机、21-模组、22-云台电机A、23-云台电机B、24-小电机B、25-扭簧、26-小电磁铁、27-柔性机械手B、28-齿轮齿条、29-雷达、30-摄像头A,31-摄像头B,
33-常温层,34-扫描雷达,35-冷藏层,36-超声波传感器A,37-4G模组,38-控制器,39-车体,40-交换机,41-电池,42-水箱层,43-机架,44-摄像头组,45-弹簧铰链,46-水箱盖,47-滤板,48-前门,49-电动推拉杆,50-滑轨,51-出水口,52-电磁阀,53-舵机,54-进水口,55-液位传感器,56-减震弹簧,57-充电座,58-支撑杆,59-固定板,60-滑轨支架,61-U型架,62-冰箱,63-制冷机组,64-主轴,65-底层,66-餐盘餐食放置层,67-清洗及食物半成品放置层,68-烹饪层,69-调料层,70-抽油烟机,71-中心烟道,301-餐盘放置板,302-定齿轮,303-拖链,304-动齿轮,305-电动推杆,306-连杆机构,307-滑轨,401-连杆机构,402-定齿轮,403-拖链,404-餐具放置清洗仓,405-清洗工具,406-锅盖清洗仓,407-动齿轮,408-餐食半成品仓,409-滑轨,410-电动推杆,411-漏油斗,501-机械手,502-炒锅台面,503-平底锅台面,504-烤箱台面,505-电饭锅台面,506-电压力锅台面,507-灶具,508-烤箱,509-动齿轮,510-定齿轮,511-电动推杆,601-提升机构,602-单向阀,603-运动活塞,604-电磁推杆,605-导轨,606-棘轮机构,607-固体及粉料调料加料斗,608-定齿轮,609-动齿轮,610-液体调料加料斗,701-烟管,702-食用油桶,703-电源进线口,704-水管进水口,705-燃气进气口,706-食用油泵,707-备用电池设备,708-风机,709-增压泵,710-底板,711-门板,712-进风口,713-米仓,714-提升机构,715-旋转下料口,716-称重传感器,717-米仓盖,718-直线滑轨,501-1-锅铲,501-2-轴承一,501-3-轴承二,501-4-舵机旋转关节一,501-5-舵机旋转关节二,501-6-舵机旋转关节三,501-7-舵机旋转关节四,501-8-舵机旋转关节五,501-9-步进电机。
具体实施方式
为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图说明本发明的具体实施方式。
如图1所示,本实例中,一种智慧式家庭厨房系统,包括中央控制中心、服务器组、食材采购设备、食材制备设备、自动烹饪设备、自动送餐设备、餐具自动清洗、更换设备。其中,中央控制中心,设置于家庭厨房,用于将家庭厨房设备发送的信息上传至服务器组,并接收服务器组的控制指令控制家庭厨房的各个设备,实现家庭厨房智能自动完成食材采购、制备、烹饪、送餐以及餐具的清洗更换;服务器组,设置于家庭厨房,接收并存储中央控制中心或家庭厨房设备上传的信息,进行分析处理,根据分析处理结果向中央控制中心发送驱动指令,或向家庭厨房设备发送相应设备完成任务所需信息;食材采购设备,被配置为根据用户点餐信息或家庭食谱采购菜品的装置,为家庭厨房的自动烹饪设备提供食材支持;食材制备设备,被配置为根据分析历史用户点餐的菜品信息制备对应数量/种类的食材的装置,对相应的食材进行清洗、切装、并送入对应投料机构内,用于为家庭厨房的自动烹饪设备提供投料支持;自动烹饪设备,被配置为根据用户点餐信息或家庭食谱完成食物的取材、烹饪及装盘装置;自动送餐设备,被配置为接收中央控制中心控制指令,到达指定地点取餐并将菜品送达用户的用餐地点装置;餐具自动清洗、更换设备,被配置为接收中央控制中心控制指令,完成餐具收捡、清洗、分类以及摆放的装置。
进一步的,所述的服务器组包括运算服务器、订单服务器、菜谱服务器;所述运算服务器对获取的点餐信息/食谱信息进行解析生成驱动指令并发送至中央控制中心 所述订单服务器获取点餐信息并将该点餐信息发送至运算服务器,获取点餐信息包括通过接收用户终端发送的用户点餐信息或餐厅点餐信息,或者订单服务器根据历史用户订单数据/点餐信息,生成预测的点餐信息; 所述菜谱服务器获取食谱信息并将该食谱信息发送至运算服务器,获取食谱信息包括通过接收用户终端编辑发送的菜品需求信息,或者为菜谱服务器存储并供用户选择的菜品种类信息。
进一步的,所述的食材采购设备包括采购终端,所述采购终端接收中央控制中心的指令,完成食材的自动采购;所述的采购终端包括运载设备以及设置于运载设备上的存储设备、食材信息采集装置、支付设备、多自由度机械臂以及食材转运装置,运载设备接受中央控制中心下发的驱动指令,驱动采购终端前往菜市进行食材采购,所述的运载设备采用无人循迹驱动车,所述无人循迹驱动车设置有定位装置和自动避障设备,根据接收的中央控制中心下发的食材采购地址进行循迹导航以及自动避障,运载存储设备、食材信息采集装置以及支付设备前往指定的食材采购菜市;所述的存储设备为设置于采购终端的食材存储箱,包括至少一个常温存储箱、至少一个水产品存储箱以及至少一个保温箱,用于存放采购的不同类型食材;所述的食材信息采集装置为设置于存储设备的食材重量测量设备和/或食材体积测量设备和/或食材计数设备,用于核实采购的食材信息是否与支付信息相符;所述的支付设备包括用于采集采购食材信息的条形码扫码器以及用于采集付款账户的二维码阅读器,将采集的食材信息与支付二维码信息上传给中央控制中心并发送于运算服务器,通过比对食材信息与支付信息,在两者信息相符时由运算服务器调用支付接口对采集的二维码信息对应的账户进行支付款;所述的多自由度机械臂,通过接收中央控制中心发送的驱动指令驱动机械臂的驱动机构进行无人菜市的食材抓取、放置;所述的食材转运装置,通过接收中央控制中心的驱动指令将采购终端的食材转运至食材存储仓。
进一步的,所述的食材制备设备包括洗菜/切菜装置、送菜装置,所述的洗菜/切菜装置用于对菜品进行清洗和加工处理,并连接无人灶台区域;所述的送菜装置用于对处理完毕的菜品运送至无人灶台区域进行烹饪,并将烹饪后的餐品进行配送。
进一步的,所述的洗菜/切菜装置包括第一驱动设备、第二驱动设备、切菜设备和清洗设备,其中,第一驱动设备接收驱动指令对清洗设备进行驱动,清洗设备对菜品进行清洗;第二驱动设备接收驱动指令对切菜设备进行驱动,切菜设备对菜品进行加工处理;所述的清洗设备包括洗菜盆、超声波发生器和臭氧发生器;所述的切菜设备,还包括视觉系统和刀具库;其中,所述的视觉系统用于识别菜品和定位菜品位置;所述的刀具库通过程序驱动对菜品进行分理或固定;所述的切菜设备通过运算服务器按照实际情况的切菜方式和路径进行自动计算。
进一步的,所述的送菜装置包括第三驱动设备和送菜设备;其中,所述的第三驱动设备接收驱动指令对送菜设备进行驱动;所述的送菜设备包括温控设备,所述温控设备通过设定温度阈值,对已出餐品的温度进行控制;所述的送菜设备通过订单服务器获取用户发送的点餐信息并向所述第三驱动设备发送送菜驱动指令。
进一步的,所述的自动烹饪设备包括取材设备、烹饪设备、装盘设备、清洗设备,所述取材设备包括机器人或机器车,用于接受指令完成食材和调料的选取;所述烹饪设备设有多套,每套烹饪设备包括洗菜池、炒菜机、灶台和定时器,用于接受指令完成食材及调料的烹饪;所述装盘设备包括设置于取材设备上的机械臂或夹具,以及用于乘装食物的器具,用于接受指令完成菜品的装盘;清洗设备,用于烹饪完成后清洗取材设备、烹饪设备和装盘设备。
进一步的,所述装盘设备的机械臂上设置有摄像头,摄像头与所述取材设备连接,用于获取食物的图像信息进行图像识别。
进一步的,所述的自动送餐设备包括多个配送设备;所述配送设备包括送餐机器人或送餐机器车,送餐机器人或送餐机器车用于接收中央控制中心指令,到达指定地点取餐并将菜品送达用餐地点。
进一步的,所述送餐机器人或送餐机器车上设置有碗盆固定区域、机械臂和夹具;所述碗盆固定区域用于在送餐途中固定好菜品,防止滑落;所述的机械臂和夹具用于抓取及摆放菜品,所述机械臂上设置有摄像头,摄像头所获取的图像信息传递给中央控制中心用于图像识别,避免同一地方重复摆放菜品。
进一步的,所述的餐具自动清洗、更换设备包括餐具收捡设备、餐具清洗设备和餐具存放设备;所述的餐具收捡设备用于清理餐桌,并将餐具放入餐具清洗设备,所述的餐具收捡设备还包括一个定位模块,用于对餐桌和餐桌上的待洗餐具进行定位;所述的餐具清洗设备用于分开清洗大件餐具和小件餐具,并将餐具放入餐具存放设备;所述的餐具存放设备用于存放清洗后的餐具,并将新餐具放在清洁后的桌面上进行摆盘;所述的家庭厨房餐具自动清洗、更换设备通过订单服务器获取已完成就餐用户的信息,通过解析信息,得到餐桌编号信息,并将餐桌编号信息解析为驱动指令发送至中央控制中心。
进一步的,所述餐具收捡设备的定位模块包括一个摄像头识别设备、RFID卡阅读器和装有RFID卡的餐具;所述摄像头识别设备用于识别小件餐具和大件餐具;所述RFID卡阅读器读取对应餐具内设置的RFID卡,识别不同餐具的类型和大小。
进一步的,所述餐具清洗设备包括大件餐具清洗盘、网格状的筛选仓、小餐具清洗仓、垃圾处理仓、清洁自洗设备和设置有多自由度机械臂;所述的网格状的筛选仓包括一个高压水枪清洗装置和一个磁吸工具,第一高压水枪清洗装置将筛选后的小件餐具进行高压水枪冲洗,并将清洗后的垃圾通过筛选仓底部冲入垃圾处理仓;磁吸工具利用磁力将带有磁性的小餐具吸入小餐具清洗仓;所述大件餐具清洗盘包括第二高压水枪清洗设备、第一超声波清洗设备、第一清水清洗设备和第一紫外线烘干设备;所述的小餐具清洗仓,包括第三高压水枪清洗设备、第二超声波清洗设备、第二清水清洗设备和第二紫外线烘干设备;所述清洁自洗设备通过多自由度机械臂伸入水中和自身喷水的模式实现自洗。
进一步的,所述餐具存放设备设置有多自由度机械臂、第一存放仓和第二存放仓,多自由度机械臂把清洗后的餐具放入第一存放仓,并将第二存放仓内的餐具放在桌面进行摆盘,当第二存放仓内的餐具被多自由度机械臂取出后,第一存放仓内的餐具自动进入第二存放仓。
本实施例中,如图3到图13所示,送餐机器人,包括机器人壳体,用于保护送餐机器人内部结构,壳体内部结构包括基座和主体,基座顶部中心设置有固定轴,基座底部固定安装有支撑架,支撑架上设置有用于移动的行进装置,基座内部设置有电池和控制器,控制器与电池连接;主体通过轴承安装在基座的固定轴18上,并通过滑轨19与基座滑动连接,主体内部设置有电源层、酒水层3、饮料层4和餐具层6,主体底部设置有连接控制器的轮毂电机17,轮毂电机17接收控制器发送的控制指令,驱动主体旋转;机械手10,设置于主体上,用于取放餐具和食物。其中,餐具层内设置有餐具盘5,可用于固定餐具;机器人壳体上还设置有底部灯带15。
具体的,行进装置包括设置于支撑架内部的行进电机和传动机构2,设置于支撑架底部的履带行走机构1和辅助轮;辅助轮通过减震装置固定安装支撑架上;履带行走机构1通过传动机构与行进电机连接;行进电机与控制器连接,接收控制器的控制指令,驱动履带行走机构1实现送餐机器人的移动行进。
进一步的,还包括触摸显示屏8,安装于主体的外壳上,与控制器连接,用于显示送餐机器人内部的饮料和食物信息,以及接收用户输入的控制指令,实现人机交互。机器人到达位置后用户通过触摸显示屏8点取饮料,机器人内部旋转,当饮料到达合适位置后上下滑移门11上的电磁门锁打开,门的上侧的摩擦电机转动,门打开,用户取出饮料后传感器计数并关上大门
具体的,主体内的电源层设置有电池层取出门14,酒水层设置有酒水层左右滑移门13,饮料层设置有饮料层左右滑移门12;酒水层左右滑移门13和饮料层左右滑移门12均设置有电磁门锁和摩擦电机;电磁门锁与摩擦电机分别与控制器连接。
进一步的,还包括传感器,传感器与控制器连接,用于用户取出物品后计数。
具体的,如图10所示,机械手10包括齿轮齿条28、滚珠丝杠、云台电机A22、云台电机B23、小电机B24、扭簧25、小电磁铁26和柔性机械手B27,机械手10通过齿轮齿条28实现机械手10的开合,通过云台电机A22实现机械手10的远近伸缩;通过滚珠丝杠实现机械手10的高低升降。机器人到达位置后,平行翻折门9折叠,再把餐具从厨房抓取、放入设备内部、到达位置后取出餐具、放在餐桌上,用户用餐完毕后机器人取回餐具,筷子等放回机器人内部。
其中,机器人在抓取时通过云台电机A22和云台电机B23共同作用,控制机械手10距餐盘的位置,电机20动作通过模组21控制机械手10在高度方向上的位置;到达位置后,小电机B24启动工作,通过齿轮齿条28和小电磁铁26联合控制柔性机械手B27的开合,以便于抓取餐盘,扭簧25角度自动调节以便于配合餐盘角度,使其完全贴合餐盘壁面来抓取物品。
此外,还包括平行翻折门9和伸缩机构7,平行翻折门9与伸缩机构7连接,安装于主体顶部,用于防止餐具层中的餐具掉落;伸缩机构7与所述控制器连接,用于根据控制器发送的控制指令,打开或关闭平行翻折门9。
此外,如图11所示,机器人还包括避障模块,避障模块包括雷达29、摄像头A30和摄像头B31,其中,雷达29有两个,分别设置在行进装置的前后,与控制器连接,用于扫描采集机器人行进地面前后的图像信息;摄像头A30设置在伸缩机构7的下方,摄像头B31设置在机械手10侧面,摄像头A30和摄像头B31用于分别采集机器人行进前方和后方的环境信息,以及识别人体特征,控制器分别与摄像头A30和摄像头B31连接。此外,雷达29采用激光雷达传感器,工作时首先由发射机发射一束特定功率的激光束,经过大气传输辐射到目标表面上,反射的回波由接收装置接收,再对回波信号进行处理,提取有用信息。通过测量反射、散射回波信号的时间间隔、频率变化、波束所指方向等就可以确定目标的距离、方位和速度等信息,然后结合激光器本身的位置信息和姿态信息,准确计算出目标表面回波点的三维坐标。机器人360度旋转行进,利用激光雷达传感器测得的周围环境数据,建立地图。与地图算法相结合,建立坐标系,利用路径规划,实现机器人的导航。
超声波传感器,用于机器人避障,发射器发射超声波,超声波遇到障碍物时会反射并被接收器接收,从而使传感器检测到障碍物。因为激光雷达传感器对于透明障碍物将无法识别,而超声波传感器能够很好的识别,所以对机器人避障起到辅助作用。
摄像机A和摄像机B用于机器人图像识别,摄像头识别的颗粒度较高,能够获得丰富的纹理色彩,能够实现精细化的识别,从而辅助机器人避障。
碰撞传感器,用于机器人避障,当机器人突然产生碰撞时,使控制开关按下,此时机器人产生报警,提示产生碰撞。
本实施例中,如图14到图19所示,食材采购设备包括包括行驶部分和储存部分。其中行驶部分主体为一个车体39,储存部分为设置于车体39上的机架43;其中机架43分为三层,分别为位于最上方的常温层33,位于中部的冷藏层35和位于最下方的水箱层42。
为了能够自动外出买菜,因此在自动行驶车上设置了控制器38、交换机40、无线通信模块、多个扫描雷达34、超声波传感器A36和多个摄像头组44;其中控制器38通过交换机40与无线通信模块、多个扫描雷达34、超声波传感器A36和多个摄像头组44进行电连接。
其中无线通信模块位4G模组37,控制器38内置GPS,通过4G模组37、GPS和扫描雷达34构建导航,使自动行驶车能够自动规划路线前往买菜。通过超声波传感器A36和多个摄像头组44扫描车体39前方和左右两侧的物体,从而实现避开障碍。
其中扫描雷达34包括上层扫描雷达、中层扫描雷达和下层扫描雷达并且均位于同一侧,所述上层扫描雷达固定于位于常温层33一侧,所述中层扫描雷达固定于位于水箱层42一侧,所述下层扫描雷达位于车体39的前侧。通过4G模组37和三个扫描雷达构建导航。
所述超声波传感器A36设置于冷藏层35上并位于车头的一侧。
所述摄像头组44为双目摄像头,所述多个摄像头组44均设置与常温层33上并分别位于车体39的前后左右四个方向上。
所述水箱层42底部设置有电池41,所述电池41与控制器38、交换机40、无线通信模块、多个扫描雷达34、超声波传感器A36、多个摄像头组44、驱动组件、多个电动推拉杆49、多个电机、冰箱62和制冷机组63电连接,所述车体39底部设置有充电座57,所述控制器38设置有电量监控程序,在电池41电量不足时控制车移动到最近的充电处进行充电。
食材采购设备的充电方式采用现有的扫地机器人的充电方式。在食材采购设备普及时,先在城市中安装充电桩或者充电座,食材采购设备电量不足时会通过GPS得到附近充电处的位置,然后前往自动充电。
食材采购设备的使用通过扫码的方式进行,未使用状态下的食材采购设备停放在城市中指定的位置上,例如现在的共享单车。在人们需要买菜时,只需要在食材采购设备停放处进行扫码,通过APP进行下单付款,食材采购设备即会自动前往就近或者指定的菜市场进行买菜,由于食材采购设备本身具有GPS,能够定位各地的菜市场位置,因此通过手机即可控制食材采购设备前往指定的菜市场进行买菜,并且在买菜后前往指定的位置。
所述控制器38内设置有UWB跟随单元,使得自动行驶车可以跟随前方的使用者行走。食材采购设备在自己外出买菜时,可以通过UWB跟随单元使动行驶车自动跟随。因此无论是否人为去买菜,自动行驶车都能够进行工作。
如图18所示,所述常温层33上设置有伞架和舵机53,所述伞架为多个U型架61,所述U型架61两端铰接于舵机53上,通过舵机53控制U型架61旋转,所述多个U型架61之间设置有篷布;在舵机53的作用下,U型架61能够进行摆动,从而实现展开篷布进行遮阳挡雨。由于U型架61之间通过篷布连接,因此当一个U型架61被拉动时,其余U型架61会被篷布拉动从而将伞架完全展开,实现遮阳挡雨。
如图19所示,所述冷藏层35包括冰箱62和制冷机组63,所述冰箱62下方设置有电动推拉杆49,所述冰箱62的门与电动推拉杆49的一端铰接,电动推拉杆49的另一端铰接于机架43上;通过电动推拉杆49的伸缩,能够实现冰箱62门的自动开闭。
如图15所示,所述水箱层42底部设置有水箱和两个电动推拉杆49,所述水箱与两个电动推拉杆17电动推拉杆49的一端铰接,电动推拉杆49的另一端铰接与机架43上,所述水箱上分别设置有进水口54和出水口51,所述出水口51上设置有电磁阀52,所述水箱上方设置有水箱盖46,所述水箱盖46与水箱之间通过弹簧铰链45连接,在水箱盖46与水箱闭合状态时弹簧铰链45处于压缩状态并且水箱盖46抵靠于水箱层42顶部,在水箱被电动推拉杆49推出时,由于水箱盖46顶部没有阻力,在弹簧铰链45的作用下水箱盖46自动打开,此时可以放置水产品。为了水箱移动平滑,因此在机架43与水箱之间设置滑轨50,为了防止水箱盖46与水箱层42顶部磨损严重,因此在水箱盖46顶部或者水箱层42顶部设置导轮,在水箱前后移动时,通过导轮作用使水箱盖46与水箱层42顶部之间不会出现磨损。
以水箱层42电动推拉杆49的伸出方向为前方,所述水箱的前方设置有前门48,所述前门48顶部与水箱铰接,所述前门48与水箱之间设置有电动推拉杆49,所述水箱内设置有滤板47,所述滤板47前边与水箱前方底部铰接,滤板47后边固定有拉线,所述水箱后方设置有舵机53,所述拉线穿过水箱顶部并与舵机53连接,所述水箱内还设置有液位传感器55,液位传感器55和电磁阀52均与控制器38电连接,在水箱内水量不足时自动行驶车能够自动补水,在水量过多时能够打开电磁阀52自动放水。在需要放出水产品时,可以先打开电磁阀52进行放水,然后打开前门48并控制舵机53拉起滤板47,从而将水产品从前门48处放出,无需伸手打捞水产品。
自动补水的方式使在城市中设置多处补水点,在水箱内水位低于指定位置时,液位传感器55会发出信号,食材采购设备会根据GPS扫描附近的补水处,移动至补水处进行补水。
作为一种实施方式,补水处设置有补水水管,补水水管上设置有电动开关,电动开关上设置有通讯模块和电动阀,能够通过通讯信号的方式打开或者关闭水龙头,在食材采购设备到达指定位置后,会通过电动推拉杆49推出水箱并打开水箱盖46,然后会向电动开关发送信号,电动开关发送信号后会打开水龙头,
如图16所示,为了保持机架43的平稳程度,因此在机架43与车体39之间设置有减震结构,因此机架43通过多个减震弹簧56与车体39连接,所述减震弹簧56分别固定于车体39的四个角上。
如图17所示,机架43在拆除功能性元件之后,整体为由固定板59和支撑杆58构成的框架,其中最上层的固定板59中部设置了空心部,可以放置菜篮等物件,从而减小菜篮的高度,从而减小需要的伞架的尺寸。位于中部的固定板59中部设置有槽,用于放置电动推拉杆49。为了水箱上滑轨50安装,在机架43上设置有滑轨支架60。
具体的,所述舵机53为市场上已有的设备,为一个带摇臂的摆动机构。
本实施例中,如图20到图29所示,烹饪设备包括主轴64、底层65、餐盘餐食放置层66、烹饪层68和抽油烟机70,所述主轴64安装在底层65上,所述餐盘餐食放置层66与烹饪层68间设有清洗及食物半成品放置层67,所述烹饪层68与抽油烟机70间还设有调料层69,所述主轴64内还设有中心烟道71,所述餐盘餐食放置层66、清洗及食物半成品放置层67、烹饪层68、调料层69和抽油烟机70均安装在主轴64上。
所述抽油烟机70还包括烟管701、食用油桶702、电源进线口703、水管进水口704、燃气进气口705、食用油泵706、备用电池设备707、风机708、增压泵709、底板710和门板711,所述风机708安装在中心烟道71上,所述烟管701一端安装在风机708上,另一端安装在门板711上,所述食用油泵706通过油管与食用油桶702连接,所述增压泵709与水管进水口704连接,所述增压泵709上还设有一个三通阀,所述备用电池设备707安装在底板710上,所述抽油烟机70上还设有进风口712及倒米装置,所述倒米装置包括米仓713、提升机构714、旋转下料口715和直线滑轨718,所述米仓713上设有米仓盖717,所述米仓713外壁上还安装有称重传感器716,所述旋转下料口715安装在米仓713底部,所述提升机构714包括钢丝绳和轮子,所述钢丝绳和轮子旁还设有驱动电机,所述直线滑轨718安装在主轴64上。
其中的食用油泵706将食用油桶702内的食用油通过油管注入到炒锅内,炒菜产生的油烟经过中心烟道冷却,通过喷雾清洗,处理好的油烟在风机708的作用下从烟管701排出,根据烹饪层68工作的台面相应开启对应的抽油烟机,一对一吸走油烟,根据用户的需要,通过称重传感器716自动控制下米量,通过提升机构714的电机带动轮子缠绕钢丝绳实现米仓713的缓慢下降与提升,靠近锅口,米仓713内的大米通过旋转下料口715注入到电饭锅内,避免大米洒落在外,设置的备用电池设备707能够实现在停电或断电的情况下,保证装置还能正常工作。
所述调料层69包括提升机构601、运动活塞603、导轨605、棘轮机构606、固体及粉料调料加料斗607、定齿轮608、动齿轮609和液体调料加料斗610,所述提升机构601安装在主轴64上,所述提升机构601与动齿轮609间还设有定齿轮608,所述固体及粉料调料加料斗607安装在导轨605上,所述棘轮机构606安装在固体及粉料调料加料斗607内,所述棘轮机构606旁还设有驱动电机,所述液体调料加料斗610内设有多个单向阀602,所述运动活塞603安装在液体调料加料斗610下料口处,所述运动活塞603旁还设有电磁推杆604。
其中的动齿轮609配合定齿轮608,将调料加料斗旋转至需要加料的锅口上方,提升机构601将调料加料斗缓慢下降,靠近锅口,棘轮机构606配合导轨605将固体及粉料调料加料斗607内的调料注入到锅内,电磁推杆604推动运动活塞603,将液体调料加料斗610内的调料经单向阀602注入到锅内。
所述烹饪层68包括多个机械手501、两个炒锅台面502、平底锅台面503、烤箱台面504、电饭锅台面505、电压力锅台面506、动齿轮509、定齿轮510和多个电动推杆511,所述炒锅台面502、平底锅台面503、电饭锅台面505和电压力锅台面506上均安装有一个机械手501,两个所述炒锅台面502均安装有灶具507,所述烤箱台面504上安装有烤箱508,所述平底锅台面503、电饭锅台面505和电压力锅台面506上均安装有电磁炉,所述电动推杆511安装在炒锅台面502上,所述定齿轮510安装在主轴64上,所述动齿轮509与定齿轮510互相啮合,所述炒锅台面502、平底锅台面503、电饭锅台面505和电压力锅台面506旁均设有电动推杆511,所述炒锅固定在炒锅台面502上,所述烹饪层68顶部还安装有摄像头,所述机械手501包括旋转关节、锅铲501-1、轴承一501-2和轴承二501-3,所述旋转关节包括舵机旋转关节一501-4、舵机旋转关节二501-5、舵机旋转关节三501-6、舵机旋转关节四501-7、舵机旋转关节五501-8和步进电机501-9,所述轴承一501-2安装在舵机旋转关节一501-4上,所述舵机旋转关节一501-4能够进行圆周360°旋转,所述舵机旋转关节二501-5、舵机旋转关节三501-6、舵机旋转关节四501-7和舵机旋转关节五501-8均可180°水平运动,所述锅铲501-4和轴承二501-3均安装在舵机旋转关节五501-8上,所述机械手501还内置有控制器,配合算法可以实现锅铲501-1进行任意角度旋转,实现翻炒、盛汤、铲菜以及盛饭动作。
其中安装在烹饪层68顶部的摄像头能视频监控整个装置作业过程,通过机械手501对锅内的食材进行翻炒,根据程序完成炒菜后,通过电动推杆511将炒锅台面502缓慢顶出,炒好的菜品通过炒锅上开设的导流口倒入餐盘餐食放置层66自动升出的菜碟内,通过电动推杆511将炒锅复位,根据所炒菜品的油污程度,自动喷射适量食用清洁机,机械手501对炒锅进行洗刷作业,电饭锅台面505旁的机械手501将蒸好的饭盛到碗内,电压力锅台面旁的机械手501将需要的食材放入电压力锅内,再将放置在清洗及食物半成品放置层67内的锅盖取出,盖在电压力锅上。
所述清洗及食物半成品放置层67包括多个连杆机构401、定齿轮402、拖链403、餐具放置清洗仓404、锅盖清洗仓406、动齿轮407、多个餐食半成品仓408、多个滑轨409、多个电动推杆410和漏油斗411,所述拖链403安装在主轴64上,所述定齿轮402与动齿轮407互相啮合,所述餐具放置清洗仓404上还设有清洗工具405,每个所述餐食半成品仓408内均安装有一个连杆机构401,每个所述连杆机构401底部均安装有一个电动推杆410,每个所述电动推杆410旁均安装有一个滑轨409。
其中餐食半成品仓408内放置有洗好后的食材,餐具放置清洗仓404内放置有饭勺、汤勺和炒菜铲,通过设置的电动推杆410推动连杆机构401将餐食半成品仓408顶出,方便取出里面的食材,通过安装在主轴64上的定齿轮402与动齿轮407啮合,使清洗及食物半成品放置层67能够绕主轴64旋转,操作方便。
所述餐盘餐食放置层66包括多个餐盘放置板301、定齿轮302、拖链303、动齿轮304、电动推杆305、多个连杆机构306和多个滑轨307,所述定齿轮302安装在主轴64上,所述动齿轮304与定齿轮302互相啮合,所述拖链303安装在定齿轮302上,每个所述餐盘放置板301底部均安装有一个连杆机构306,每个所述连杆机构306底部均安装有一个电动推杆305,每个所述电动推杆305旁均安装有一个滑轨307。
通过电动推杆305推动餐盘放置板301,将餐盘放置板301推出至炒锅导流口下方,再通过连杆机构306抬升餐盘放置板301靠近炒锅,根据菜品的不同,可以自动调节抬升的高度,方便将炒锅内的菜品放入菜碟内,餐盘餐食放置层66可暂存多盘菜品。
本发明中,如图2所示,一种智慧式家庭厨房控制方法,包括以下步骤:
S1,家庭厨房的食材采购设备通过订单服务器接收用户终端提交的点餐信息并提交到菜谱服务器,菜谱服务器根据点餐信息获取用户家庭食谱信息并将该家庭食谱信息发送至运算服务器,运算服务器对获取的家庭食谱信息进行解析生成驱动指令并发送至中央控制中心,中央控制中心分发驱动指令至对应采购终端前往菜市按照家庭食谱进行食材采购,同时接受采购终端采集返还的食材信息与支付信息,并通过运算服务器完成食材的支付,采购终端在食材采购完毕后返回家庭厨房;
S2,家庭厨房的食材制备设备接收中央控制中心的驱动指令,分别驱动洗菜设备、切菜设备、送菜设备,完成食材的清洗、加工处理,以及将处理好的食材送往家庭厨房的烹饪设备;
S3,菜谱服务器根据用户订单的菜品信息向中央控制中心下发菜品烹饪指令,家庭厨房的烹饪设备接收中央控制中心的驱动指令后,驱动取材设备选取食材和调料,并通过烹饪设备完成菜品的自动烹饪,再通过装盘设备将烹饪好的菜品进行装盘,最后通过清洗设备对设备所有设备进行清洗并放回至原处;
S4,中央控制中心在菜品烹饪完成后向家庭厨房送餐设备下发取餐指令,家庭厨房送餐设备在接收到取餐指令后,驱动配送设备前往烹饪地点取餐,并将烹饪好的菜品送达用户用餐地点,同时通过机械臂和夹具将菜品摆放在餐桌上预设的碗盆摆放区域;
S5,用户用餐完毕之后通过中央控制中心向家庭厨房餐具自动清洗、更换设备发送餐具清洗指令,家庭厨房餐具自动清洗、更换设备在接收到指令后,首先通过餐具收捡设备清理餐桌上的餐具并送往设备的餐具清洗设备处,餐具清洗设备对餐具分类同完成对餐具清洁,然后将清洁过的餐具放入餐具存放仓,最后餐具清洗设备进行自洗,完成餐具的自动清洗、更换。
进一步的,还包括采购终端支付步骤,所述采购终端支付步骤包括以下子步骤:
S1,采购终端的支付设备通过条形扫码器采集采购的食材信息,同时通过二维码阅读器采集支付信息,并将采集食材信息和支付信息上传至中央控制中心;
S2,中央控制中心接收采购终端上传的信息并将信息提交运算服务器进行比对;
S3,运算服务器根据上传的食材信息分析计算不同食材采购数量对应的价格总和,然后将计算出来的价格总和同上传的支付信息的支付金额进行比对分析;
S4,若两者信息相符,运算服务器调用支付接口对采集的二维码信息对应的账户进行支付。
进一步的,还包括采购终端的食材采购步骤,所述食材采购步骤包括以下子步骤:
S11,通过用于家庭厨房的订单服务器获取订单信息,所述订单服务器获取订单信息并将该订单信息发送至运算服务器,获取订单信息包括通过接收用户终端APP发送的用户订单信息或餐厅点餐信息,或者订单服务器根据历史用户订单数据/点餐信息,生成预测的订单信息;
S12,解析订单信息/点餐信息,通过运算服务器对获取的订单信息/点餐信息进行解析,回去订单/点餐信息所需菜品信息;
S13,食材余量采集,通过设置于家庭厨房连接中央控制器的食材余量采集装置,采集订单信息/点餐信息中菜品对应食材的消耗速率以及剩余储量并发送中央控制中心;
S14,分发采购指令,中央控制中心接收食材余量采集装置上传的食材消耗速率以及剩余储量值发送给运算服务器,运算服务器根据内部设置存储的家庭厨房对应食材储量最低阈值以及食材消耗速率最高阈值,在食材消耗速率超过最高阈值时或在剩余储量值低于食材储量最低阈值时向中央控制中心下发对应食材的采购指令根据餐厅的食材剩余储量制定对应的食材采购数量,并向采购终端下发采购驱动指令;
S15,食材采购,通过包括运载设备以及设置于运载设备上的存储设备、食材信息采集装置以及支付设备的采购终端,接受中央控制中心下发的驱动指令,利用运载设备驱动采购终端前往菜市进行食材采购。
S16,收集采购信息,采购终端采集返还的食材信息与支付信息,并将该食材信息与支付信息发送至运算服务器进行分析比对;
S17,支付采购费用,运算服务器将采购的食材信息和支付信息进行比对,确认无误后调用支付接口向商家进行支付;
S18,食材存放,采购终端在完成食材采购后,按照原路线返回家庭厨房,通过多自由度机械臂将采购的食材从运载设备上取出,并放至餐厅的食材存放处。
进一步的,还包括食材制备步骤,所述食材制备步骤包括以下子步骤:
S21,分发洗菜指令,中央控制中心向洗菜设备发送驱动指令,对洗菜设备进行驱动;
S22,食材清洗,洗菜设备接收到下发的洗菜指令后,控制运载器将需要清洗的菜品从餐厅的食材存放处取出,放入洗菜盆内的菜篮子里,该洗菜盆顶部的案板自动关闭,盆内各喷头开始喷水,进行初步清洗工作,当洗菜设备检测到洗菜盆内充水量达到要求时,洗菜盆内的超声波发生器、臭氧发生器开始工作,同时洗菜盆内的菜篮子来回摆动,增强洗涤效果,直至清洗干净后程序自动关闭,并将清洗过的食材通过运载器送往切菜设备的案板上;
S23,分发制备指令,中央控制中心检测到洗菜设备完成食材清洗后,向切菜设备下发切菜驱动指令;
S24,食材制备,切菜设备接收到切菜指令后,通过视觉系统识别采集案板上的菜品信息及相应位置信息同时上传运算服务器,运算服务器根据程序指令及实际情况自动计算切菜方式及路径并发送至切菜设备,切菜设备接收到切菜方式及路径后,驱动刀具库内的刀具,按程序指令对菜品进行切菜;
S25,食材运送,中央控制中心检测到切菜设备完成切菜后,向送菜设备下发食材运送驱动指令,驱动送菜设备将制备好的食材从切菜设备的案板上取出,并送往家庭厨房的无人灶台处。
进一步的,还包括食材烹饪步骤,所述食材烹饪步骤包括以下子步骤:
S31,预设烹饪程序指令,运算服务器根据用户订单信息/点餐信息以及备注信息预设每种菜品的做法顺序,具体为设置灶台加热时间以及食材和调料的加入顺序,并将预设的烹饪程序指令发送至中央控制中心;
S32,选取食材和调料,中央控制中心根据预设的烹饪程序指令向取材设备下达烹饪驱动指令,驱动取材设备从无人灶台上选定用户订单菜品/点餐菜品所需的食材和调料,同时将食材和调料送往无人灶台烹饪设备处;
S33,烹饪菜品,烹饪设备将步骤S32中取得的食材和调料按照收到的驱动指令放入烹饪设备的锅中进行烹饪;
S34,菜品装盘,烹饪设备完成烹饪后,装盘设备按照驱动指令将乘装食物的器具从存放处送出,同时烹饪设备控制锅倾斜将烹饪好的菜品导入器具中,装盘设备通过机械臂上设置的摄像头检查锅中食物是否全部倒入乘装食物的器具中,若没有完全倒入,则利用锅铲将余下的食物铲入乘装食物的器具中,完成菜品装盘后烹饪设备的锅调整回原位置;
S35,设备清洗,中央控制中心在检测到菜品完成装盘后,向无人灶台的清洗设备发送设备清洗驱动指令,驱动清洗设备对取材设备、烹饪设备和装盘设备进行清洗,清洗完成后将所有设备放回原处。
进一步的,还包括自动送餐步骤,所述自动送餐步骤包括以下子步骤:
S41,下发取餐指令,中央控制中心检测到无人灶台完成菜品装盘后,向配送设备的送餐机器人或者送餐机器车下达取餐驱动指令;
S42,菜品取放,送餐机器人或送餐机器车在接收到取餐指令后,到达无人灶台的装盘处,通过机械臂和夹具将抓取装有菜品的器具并放置于碗盆固定区域;
S43,菜品配送,送餐机器人或送餐机器车通过运算服务器解析用户点餐信息,将菜品信息和用户餐桌号进行比对匹配后,得到用户的餐桌号并定位用户餐桌位置,将菜品送达用户地点;
S44,菜品摆放,送餐机器人或送餐机器车首先通过设置在机械臂上的摄像头获取餐桌上的图像信息,然后通过机械臂和夹具将菜品摆放在餐桌上预设的碗盆摆放区域,完成自动送餐;
S45,设备清洗,送餐机器人或送餐机器车完成送餐后返回家庭厨房的清洗设备处,同时中央控制中心驱动清洗设备对送餐机器人或送餐机器车进行清洗。
进一步的,还包括餐具自动清洗、更换步骤,所述餐具自动清洗、更换步骤包括以下子步骤:
S51,下发餐具收捡指令,中央控制中心通过订单服务器在确认用户用餐完毕离开餐桌,走出餐厅后,向餐具收捡设备发送驱动指令;
S52,收捡餐具,餐具收捡设备接收驱动指令后,通过定位模块感应餐桌位置,移动至待清理餐桌,智能扫描、并定位餐桌上的餐具,对餐桌和餐具进行统一收纳和清理,;
S53,餐具分类清洗,餐具清洗设备对餐具分类进行清洗处理,将大件餐具放入大件清洗盘,将小件餐具进行放入筛选仓筛选,分别进行清洗、消毒烘干;
S54,餐具分类存放,餐具存放设备对清洗过的餐具分别放置在不同餐具对应的存放仓,或将清洗过后的新餐具放在清洁后的桌面上进行摆盘;
S55,清洗设备自洁,餐具清洗设备还包括清洁自洗设备和设置有多自由度机械臂,通过多自由度机械臂将餐具清洗设备伸入水中和清洁自洗设备喷水的模式实现设备自洗,完成清洗设备自洁。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种智慧式家庭厨房系统及其控制方法
- 一种用电安全智慧式控制系统及其控制方法