一种室内定位方法及装置
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及位置定位领域,具体涉及一种室内定位方法及装置。
背景技术
消防员在火灾现场进行救火/救援工作,工人在隧道施工,对人员在作业区域的定位有助于加强对人员的人身安全保护,一旦出现险情导致人员受伤、受困时,掌握人员的位置将极大地帮助救援人员开展救援工作,在此基础上,结合建筑的室内平面结构,可以实现室内导航功能,对消防救援等应用场景有非常重要的意义。
现有的室内定位技术主要包括超宽带(UWB)、蓝牙、超声波、5G、超声波、RFID等。
超宽带(UWB)、蓝牙、超声波、5G这些技术的基础都是三角定位原理,通过采集无线电波或超声波在发射和反射接收的时差来计算距离,然后根据多个基站到被定位目标的距离来计算目标的位置。这类技术的优点是能够提供较高的定位精度,缺点是需要提前部署基站装置,并且定位目标需要携带与基站交互的终端。
5G基站虽然通常由运营商部署,但5G在室内的覆盖通常也需要在室内部署基站。由于建筑发生火灾的时候通常会第一时间切断电源,这将导致5G基站无法工作,也就无法提供定位能力。
RFID方案一般有两种工作方式,一是在室内间隔一定距离部署RFID读卡机具,持续发射射频信号,当携带RFID标签的人员从机具射频范围经过时,机具可读取RFID标签,从而标记该人员的位置;另一种方式是在室内间隔一定距离部署RFID标签,然后由人员携带RFID机具在RFID标签处打卡,从而对人员进行定位。RFID方案在建筑工地应用比较广泛,但仍然需要提前进行装置的安装部署。
以上室内定位技术都需要预先部署相关装置,这一限制对于一些应用场景是无法接受的。典型的场景是在消防领域,不可能预先部署定位装置。
发明内容
本发明要解决的问题是针对现有技术中所存在的上述不足而提供一种室内定位方法及装置可以对人员进行实时定位。
为实现上述目的,本发明采用了如下的技术方案:一种室内定位方法,包括以下步骤1)人员佩戴装有GNSS定位模块的装置,通过定位模块判断装置是否进入室内;
2)当装置进入室内,通过装置上安装的加速度传感器、陀螺仪、磁力传感器和精度气压计分别采集加速度矢量、角速度矢量、地磁矢量和气压值;
3)根据加速度的变化曲线识别人员跨步;
4)根据加速度矢量、角速度矢量、磁力方向矢量进行融合滤波,计算得到装置坐标到世界坐标的变换矩阵以及航向角;
5)利用变换矩阵将加速度矢量分解为纵向、垂直方向以及横向的加速度;
6)利用纵向加速度的幅值以及上一次跨步的步频,计算出步长;
7)根据计算出的步长和航向角,计算出最后一步的位置坐标;
8)将位置坐标以及气压值通过网络发送到后台系统;
9)后台系统根据气压值的变化判断人员是否存在上下楼的动作,并根据气压差计算人员所在楼层;
10)后台系统根据楼层和位置坐标对人员最终定位。
进一步,后台系统根据计算出的楼层,调出对应的平面图,根据平面图得出人员在楼层的具体位置。
进一步,后台系统对位置进行校正,并将校正后的坐标下发给装置;装置在收到后台系统下发的坐标后,以该坐标为起点,重新开始积分运算,从而消除累积误差。
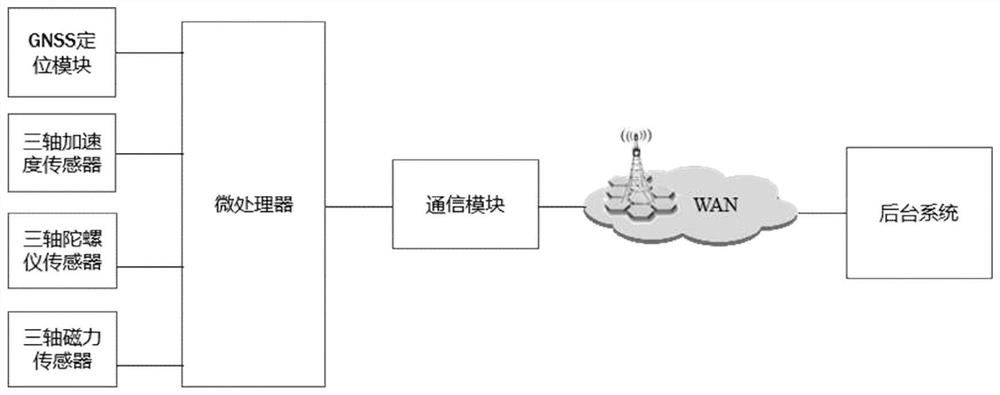
同时本发明提出一种室内定位装置,包括GNSS定位模块、三轴加速度传感器、三轴陀螺仪传感器、三轴磁力传感器和处理器,所述处理器分别连接所述GNSS定位模块、三轴加速度传感器、三轴陀螺仪传感器、三轴磁力传感器,所述处理器通过通讯模块连接后台系统。
作为具体实施例,所述处理器连接融合滤波模块,所述融合滤波模块对加速度矢量、角速度矢量和磁力方向矢量通过卡尔曼滤波技术进行融合和滤波校正。
作为具体实施例,所述后台系统包括处理模块、信号接受模块、CAD模块、储存模块和校正模块,所述处理器连接信号发送模块,所述信号发送模块通过网络连接所述信号接受模块,所述处理模块连接所述信号接受模块、CAD模块、储存模块和校正模块。
相比于现有技术,本发明具有如下有益效果:本发明的一种室内定位方法通过人员佩戴装有GNSS定位模块、加速度传感器、陀螺仪、磁力传感器和高精度气压计的装置对人员进入室内后进行定位,通过加速度传感器、陀螺仪、磁力传感器和高精度气压计分别采集加速度矢量、角速度矢量、地磁矢量和气压值,然后通过采集到的加速度矢量、角速度矢量、磁力方向矢量和气压值进行计算处理从而得到位置坐标和楼层,从而确定人员的楼层位置;通过一种室内定位装置的GNSS定位模块、三轴加速度传感器、三轴陀螺仪传感器和三轴磁力传感器进行数据采集,采集到的数据通过处理器进行处理,然后发送给后台系统,后台系统根据储存模块和CAD模块判断和校正人员位置。
本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
图1为本发明一种室内定位装置示意图。
图2为按惯性定位积分算法得到的运动轨迹。
图3基于加速度的跨步识别图。
图4上下楼时的气压变化曲线。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与作用更加清楚及易于了解,下面结合附图和具体实施方式对本发明作进一步阐述:
本发明提出了一种室内定位方法,包括以下步骤
1)人员佩戴装有GNSS定位模块的装置,通过定位模块判断装置是否进入室内;所述GNSS定位模块接收到的卫星信号由强急剧变弱时,可判断人员从室外移动到室内,再结合最后解算得到的经纬度坐标,与建筑入口坐标进行比对,可确认人员从室外经入口移动到室内,反之可判断人员从室内移动到室外;
2)当装置进入室内,通过装置上安装的加速度传感器、陀螺仪、磁力传感器和精度气压计分别采集加速度矢量、角速度矢量、地磁矢量和气压值;加速度传感器采集人员运动的加速度曲线,根据加速度曲线判断人员的跨步;所述精度气压计能检测到10厘米的高度变化,通过所述精度气压计判断人员是否进行了跨楼层的移动;
3)根据加速度的变化曲线识别人员跨步;
4)根据加速度矢量、角速度矢量、磁力方向矢量进行融合滤波,计算得到装置坐标到世界坐标的变换矩阵以及航向角;根据加速度矢量、陀螺仪的角加速度矢量以及磁力传感器的地磁方向矢量进行卡尔曼滤波或四元数法进行融合计算,从而计算出人员的实时朝向,作为实时运动方向;
5)利用变换矩阵将加速度矢量分解为纵向、垂直方向以及横向的加速度;
6)利用纵向加速度的幅值以及上一次跨步的步频,计算出步长;
7)根据计算出的步长和航向角,计算出最后一步的位置坐标;
8)将位置坐标以及气压值通过网络发送到后台系统;
9)后台系统根据气压值的变化判断人员是否存在上下楼的动作,并根据气压差计算人员所在楼层;
10)后台系统根据楼层和位置坐标对人员最终定位。
作为具体实施例,所述装置装有数字罗盘,所述后台系统读取所述三轴加速传感器和数字罗盘的值,判断运动状态,通过判断运动状态判断用户是否处于二位平面或者楼梯区域。
作为具体实施例,所述三轴加速传感预设门限值。
作为具体实施例,所述一种室内定位方法还包括对人员步幅的估算,人员在行走时的步长,与步频以及沿行走方向的加速度曲线幅值均高度相关,正常行走(或跑动)的情况下,步频越快,步幅越大;人体走动分解到每一步,实际上是一个加速—减速—再加速的过程,因此测量沿运动方向的加速度波动幅度,也可用于推算步幅,即加速度波动越大则步幅越大;通过搜集不同人员在不同行走速度情况下的步频、加速度均方差以及步幅长度,可以将步频、加速度均方差与步幅之间的关系拟合为一个二维函数,该函数用于实时动态计算人员运动的步幅,并结合上述对跨步的计数以及人员的运动方向,从而计算人员相对位移。对人员每一步相对位移进行持续积分,则可获得人员的运动轨迹。
作为具体实施例,后台系统根据计算出的楼层,调出对应的平面图,根据平面图得出人员在楼层的具体位置。
作为具体实施例,所述后台系统还包括校正系统,所述校正系统基于原则a人员不能穿直接过墙移动到其他空间;b人员进出空间必须经过入口,入口通常可以是门,由维护人员在编辑平面图时标定;c人员只能通过楼梯或电梯进行跨层移动,楼梯口或电梯位置由维护人员在编辑平面图时标定;d人员从室外移动到室内,或由室内移动到室外,必须经过建筑的入口,建筑入口由维护人员在编辑平面图时标定,且应标定建筑入口的精确的卫星定位坐标(经纬度)。
作为具体实施例,当装置将新的坐标位置、气压值发送到后台系统后,后台系统首先根据气压值解算出高度差,然后判断人员所在楼层,根据所在楼层调出楼层平面布局数据。然后根据坐标点判断人员位置是否从上一个位置所在多边形移出,如果人员位置移出多边形,则进一步判断是否通过出入口移出(即判断在一定距离阈值范围内是否存在上一个多边形的出入口);如果存在合法的出入口,则将该人员坐标位置校正到出入口坐标,以消除之前积分的累积误差;如果附近不存在合法的出入口,则判断该位置坐标非法,系统查找该坐标距离上一个多边形最近边,并以该边为对称轴,将上述坐标位置镜像变换到多边形内,从而完成位置校正。
作为具体实施例,后台系统对位置进行校正,并将校正后的坐标下发给装置;装置在收到后台系统下发的坐标后,以该坐标为起点,重新开始积分运算,从而消除累积误差。
本发明同时提出一种室内定位装置,包括GNSS定位模块、三轴加速度传感器、三轴陀螺仪传感器、三轴磁力传感器和处理器,所述处理器分别连接所述GNSS定位模块、三轴加速度传感器、三轴陀螺仪传感器、三轴磁力传感器,所述处理器通过通讯模块连接后台系统,所述三轴加速度传感器采集人员运动的加速度曲线,根据加速度曲线判断人员的跨步。
作为具体实施例,所述处理器连接融合滤波模块,所述融合滤波模块对加速度矢量、角速度矢量和磁力方向矢量通过卡尔曼滤波技术进行融合和滤波校正,融合滤波模块用于对人员速度、位置及姿态信息与信号接收器接受到的采集信号进行融合、滤波校正;GNSS定位模块用于将数据和融合校正处理后的数据进行解算处理,得到准确的位置和姿态信息。
作为具体实施例,所述后台系统包括处理模块、信号接受模块、CAD模块、储存模块和校正模块,所述处理器连接信号发送模块,所述信号发送模块通过网络连接所述信号接受模块,所述处理模块连接所述信号接受模块、CAD模块、储存模块和校正模块,所述CAD模块在所述后台系统夹加载CAD建筑平面图以及由纸质图档扫描得到的图片,操作人员可在通过描画建筑平面图上的房间、走廊等区域,形成若干封闭多边形,并在门、出入口的位置进行标定,最终楼层平面图被参数化为若干个封闭多边形和出入口坐标。
作为具体实施例,所述后台系统通过信号接受模块连接所述处理器连接的信号发送模块,所述处理器连接精度气压计,所述处理器连接换算单元,所述换算单元将所述精度气压计的气压差换算成高度差,根据高度差以及建筑的楼层高度,可计算出人员所在楼层。
作为具体实施例,所述校正模块实现所述后台系统接收所述装置上报的坐标;根据建筑楼层读取改楼层平面的多边形序列,然后判断该坐标点位于哪个多边形内部;当所述装置上报新的坐标,所述后台系统检测该坐标是否位于上一个坐标点所在多边形之外;如果新坐标点位于上一个坐标点所在多边形之外,则进一步判断附近是否存在出入口,如果与出入口的距离在阈值范围内,则将新坐标点校正到出入口所在的坐标;如果新坐标点位于上一个坐标点所在多边形之外且附近不存在出入口,则计算并寻找新坐标点与该多边形的最近边;以找到的最近边作为对称轴,将新左边点进行镜像,从而将新坐标点校正到多边形内。
作为具体实施例,所述后台系统包括编辑模块、储存模块和管理模块,所述编辑模块、储存模块和管理模块均为现有技术能实现,所述编辑模块由工作人员编辑,包括对楼层平面图进行编辑,然后储存模块储存平面布局数据,所述处理器接受到信号后根据人员所在楼层对运动轨迹进行校正。
作为具体实施例,所述处理器包括判断单元,所述判断单元将所述处理器接受到的信号与所述储存模块储存的CAD模块里的CAD图纸进行比较,判断用户在具体的楼层位置。
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种室内定位的数据库建立方法和室内定位方法及装置
- 室内定位考勤管理方法和装置及室内定位考勤方法和装置