管道检测机器人
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及机器人技术领域,尤其涉及管道检测机器人。
背景技术
管道运输在当今社会的多种行业起到至关重要的作用,资源领域的油气运输、城市建筑的通风系统中,管道的使用都是必不可少的。但由于地下管道埋在地下,在使用过程中的定期维护检测成为工程技术人员的一大难题。
目前工作人员用来检测管道的机器人大都是通过连接导线和操作终端连接,但机器人上大都没有设置连接导线的固定机构,机器人在管道内部行驶时会拖动导线在管道内移动,时间久了,连接导线和机器人连接的地方容易松动,容易导致机器人接触不良。
发明内容
本发明的目的在于:为了解决上述的问题,而提出的管道检测机器人。
为了实现上述目的,本发明采用了如下技术方案:
管道检测机器人,包括机器人主体、设置在机器人主体侧端的摄像头模组、固定设置在机器人主体底端的主动滚轮组件、对称设置在机器人主体上表面的多组辅助轮组件和固定设置在机器人主体内部用于配合驱动主动滚轮组件及辅助轮组件收纳或展开的驱动机构;
所述主动滚轮组件包括固定设置在机器人主体底端的两个主动支撑臂,两个所述主动支撑臂内部均滑动设置有第一弧形顶杆,所述第一弧形顶杆与主动支撑臂内部之间固定设置有第一复位弹簧,且所述第一弧形顶杆远离机器人主体的一端固定设置有滑块,所述滑块通过滑槽滑动设置在主动支撑臂内部侧壁,所述滑块远离第一弧形顶杆的一端固定设置有动力箱,所述动力箱内部固定设置有第一驱动电机,所述第一驱动电机输出轴固定连接有传动轴,所述动力箱底端固定设置有套筒,所述传动轴转动设置在套筒内部,且所述传动轴底部固定设置有第一锥齿轮,所述第一锥齿轮啮合连接有第二锥齿轮,所述第二锥齿轮中心轴固定连接有主动轮主体。
作为上述技术方案的进一步描述:
所述辅助轮组件包括固定设置在机器人主体上表面的多个从动支撑臂,所述从动支撑臂内部设置有第二弧形顶杆,所述第二弧形顶杆与从动支撑臂内部之间固定设置有第二复位弹簧,且所述第二弧形顶杆远离机器人主体的一端固定设置有连接杆,所述连接杆滑动贯穿从动支撑臂底部,所述连接杆底端设置有从动轮主体。
作为上述技术方案的进一步描述:
所述驱动机构包括固定设置在机器人主体表面的第二驱动电机,所述第二驱动电机输出轴固定连接有蜗杆,所述蜗杆啮合连接有蜗轮,所述蜗轮中心轴固定连接有转动柱,所述转动柱转动设置在机器人主体内部,且所述转动柱两端均固定设置有转盘,所述转盘侧端均分布有多组顶块。
作为上述技术方案的进一步描述:
所述机器人主体侧端固定设置有用于保护摄像头模组的防护罩。
作为上述技术方案的进一步描述:
所述第一弧形顶杆与第二弧形顶杆均滑动贯穿机器人主体内壁。
作为上述技术方案的进一步描述:
所述顶块表面设置有用于配合第一弧形顶杆与第二弧形顶杆使用的弧形面。
综上所述,由于采用了上述技术方案,本发明的有益效果是:
本发明中,通过设置的主动滚轮组件,可以实现无需电线牵引,机器人自动行走;通过设置的辅助轮组件,可以保证机器人在管道内的稳定,同时方便调节展开直径,适用于不同尺寸管道。
附图说明
图1示出了根据本发明提供的管道检测机器人整体外观结构示意图;
图2示出了根据本发明提供的管道检测机器人整体剖面结构示意图;
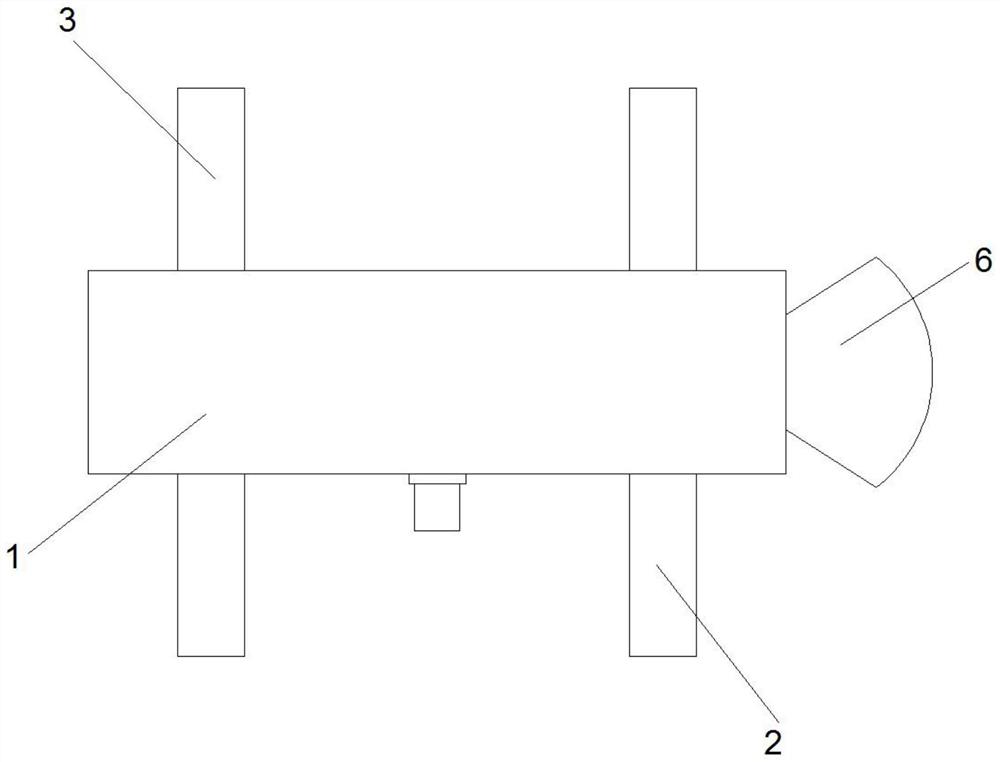
图3示出了根据本发明提供的管道检测机器人侧视结构示意图;
图4示出了根据本发明提供的管道检测机器人主动滚轮组件放大结构示意图。
图例说明:
1、机器人主体;2、主动滚轮组件;3、辅助轮组件;4、驱动机构;5、摄像头模组;6、防护罩;201、主动支撑臂;202、第一弧形顶杆;203、第一复位弹簧;204、滑块;205、动力箱;206、第一驱动电机;207、传动轴;208、套筒;209、主动轮主体;301、从动支撑臂;302、第二弧形顶杆;303、第二复位弹簧;304、连接杆;305、从动轮主体;401、第二驱动电机;402、蜗杆;403、蜗轮;404、转动柱;405、转盘;406、顶块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
请参阅图1-4,本发明提供一种技术方案:管道检测机器人,包括机器人主体1、设置在机器人主体1侧端的摄像头模组5、固定设置在机器人主体1底端的主动滚轮组件2、对称设置在机器人主体1上表面的多组辅助轮组件3和固定设置在机器人主体1内部用于配合驱动主动滚轮组件2及辅助轮组件3收纳或展开的驱动机构4;
主动滚轮组件2包括固定设置在机器人主体1底端的两个主动支撑臂201,两个主动支撑臂201内部均滑动设置有第一弧形顶杆202,第一弧形顶杆202与主动支撑臂201内部之间固定设置有第一复位弹簧203,且第一弧形顶杆202远离机器人主体1的一端固定设置有滑块204,滑块204通过滑槽滑动设置在主动支撑臂201内部侧壁,滑块204远离第一弧形顶杆202的一端固定设置有动力箱205,动力箱205内部固定设置有第一驱动电机206,第一驱动电机206输出轴固定连接有传动轴207,动力箱205底端固定设置有套筒208,传动轴207转动设置在套筒208内部,且传动轴207底部固定设置有第一锥齿轮,第一锥齿轮啮合连接有第二锥齿轮,第二锥齿轮中心轴固定连接有主动轮主体209。
进一步,辅助轮组件3包括固定设置在机器人主体1上表面的多个从动支撑臂301,从动支撑臂301内部设置有第二弧形顶杆302,第二弧形顶杆302与从动支撑臂301内部之间固定设置有第二复位弹簧303,且第二弧形顶杆302远离机器人主体1的一端固定设置有连接杆304,连接杆304滑动贯穿从动支撑臂301底部,连接杆304底端设置有从动轮主体305。
进一步,驱动机构4包括固定设置在机器人主体1表面的第二驱动电机401,第二驱动电机401输出轴固定连接有蜗杆402,蜗杆402啮合连接有蜗轮403,蜗轮403中心轴固定连接有转动柱404,转动柱404转动设置在机器人主体1内部,且转动柱404两端均固定设置有转盘405,转盘405侧端均分布有多组顶块406。
进一步,机器人主体1侧端固定设置有用于保护摄像头模组5的防护罩6。
进一步,第一弧形顶杆202与第二弧形顶杆302均滑动贯穿机器人主体1内壁。
进一步,顶块406表面设置有用于配合第一弧形顶杆202与第二弧形顶杆302使用的弧形面。
工作原理:使用时,将机器人主体1放置到待检测管道内,进一步打开第二驱动电机401,第二驱动电机401进一步带动蜗杆402转动,蜗杆402进一步带动与其啮合连接的蜗轮403转动,蜗轮403进一步带动与其中心轴固定连接的转动柱404转动,转动柱404进一步带动固定在其表面的转盘405转动,进一步转盘405带动固定在其侧端的顶块406转动,顶块406进一步挤压第一弧形顶杆202与第二弧形顶杆302,进一步使得第一弧形顶杆202与第二弧形顶杆302移动,第一弧形顶杆202进一步带动滑块204移动,滑块204进一步通过带动与其固定连接的动力箱205移动,进一步动力箱205带动固定在其底端的套筒208伸出主动支撑臂201,同步的第二弧形顶杆302带动连接杆304伸出从动支撑臂301;
打开第一驱动电机206,进一步第一驱动电机206带动传动轴207转动,传动轴207进一步通过第一锥齿轮带动第二锥齿轮转动,第二锥齿轮进一步带动主动轮主体209转动,从而实现机器人主体1的自行走,方便对管道内部进行检测。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 基于管道检测机器人测试平台的管道检测机器人评价方法
- 一种管道检测胶囊机器人及管道检测方法