一种作物生长管理及表型分析综合平台的使用方法
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及作物表型采集和精准农业技术领域,尤其涉及到一种作物生长管理及表型分析综合平台的使用方法。
背景技术
作物表型的高效获取是现代农业发展的一个重要方向。作物表型的采集的意义在于精准地获取作物在不同生长阶段的性状特征,通过分析作物的表型数据,有助于培养优良的作物品种。
传统的作物表型的获取方式是人工采集,通过人工采集获取作物的叶长、叶宽、叶片数等性状。但是人工采集作物表型不仅效率低,而且在表型采集过程中容易对作物造成不同程度的损伤。
发明内容
本发明针对现有技术的不足,提供一种作物生长管理及表型分析综合平台的使用方法,解决了人工获取作物表型效率低和在田间采集作物表型过程中对作物造成损害的问题,并且实现了除草和补种的自动化。
本发明是通过如下技术方案实现的,提供一种作物生长管理及表型分析综合平台的使用方法,包括如下方面:
1、综合平台包括围成种植区域的两X轴方向支撑板和两Y轴方向支撑板,以及沿X轴方向移动的龙门架,龙门架上设有位于种植区域上方且沿Y轴方向移动的滑座,所述滑座上安装有沿竖向移动的Z轴工作臂,Z轴工作臂的下端安装有工具适配器和图像采集器;利用X轴方向支撑板和Y轴方向支撑板围成种植区域,在种植区域内种植作物,以方便表型获取和生长管理,利用龙门架沿X轴方向的移动、滑座沿Y轴方向的移动,以及Z轴工作臂的竖向移动,实现工具适配器和图像采集器在种植区域内的移动;通过工具适配器拾取各功能性装置,使各功能性装置随Z轴工作臂移动,通过图像采集器对作物进行图像采集;
2、种植区域内的作物发芽后,Z轴工作臂定期带动图像采集器对每一个设定的种植位置进行图像采集,并将图像信息经智能控制装置传送到用户端,如果种植位置生长出作物,用户根据图像信息分析作物的性状,进行育种选种,如果设定的种植位置未生长出作物,智能控制装置判断为需要补种,实现了补种的自动判断;
3、当智能控制装置判断为需要补种时,智能控制装置控制Z轴工作臂移至工具台,通过工具适配器拾取工具台上的播种器,然后通过Z轴工作臂的移动带动播种器移至工具台上的种子盒上方,并拾取种子盒内的种子;智能控制装置控制Z轴工作臂移动,带动播种器移至需要补种的种植位置,通过Z轴工作臂的下移进行补种,补种结束后,将播种器送回工具台;通过调用Z轴工作臂实现自动化补种。
作为优化,在作物生长过程中,通过分析图像采集器采集的图像信息判断是否需要除草,如果需要除草,智能控制装置调用Z轴工作臂拾取工具台上的除草器,并带动除草器移至杂草所在位置除草,除草结束后,将除草器送回工具台。本优化方案通过对图像信息的分析,实现对除草的自动化判断和自动化除草,避免了作物生长环境过程中资源浪费问题。
智能控制装置根据用户设置的检测土壤性质周期,定期调用 Z轴工作臂拾取土壤检测器,利用Z轴工作臂带动土壤检测器移至检测位置,通过利用Z轴工作臂的下移,使土壤检测器插入土壤,智能控制装置接收土壤检测器检测到的数据,并将数据传到用户端,用于用户分析土壤酸碱度、湿度、土壤元素,检测结束后,将土壤检测器送回工具台。本优化方案实现了对土壤性质的定期检测,以便根据土壤情况及时采取相应措施,以满足作物在不同生长时期的需求。
作为优化,智能控制装置根据土壤检测器检测到的土壤湿度,判断是否需要对作物进行灌溉,如果需要灌溉,智能控制装置调用Z轴工作臂拾取灌溉器,利用Z轴工作臂带动灌溉器移至作物上方,通过灌溉器对作物进行灌溉,灌溉结束后,将灌溉器送回工具台。通过本优化方案的设置,实现了根据土壤湿度对种植区域的自动灌溉,从而保证了灌溉的及时性。
作为优化,在Z轴工作臂上设置真空泵,工具适配器拾取到播种器时,真空泵与播种器的吸种针头内腔连通,通过真空泵工作产生的吸力对种子进行吸取。本优化方案利用真空泵工作时在吸种针头产生的压差对种子进行吸取,避免造成种子浪费,并且在将吸种针头插入土壤后,停止真空泵的工作,即可实现针头与种子的分离,避免种子随针头移出土壤。
本发明的有益效果为:通过初始化Z轴工作臂得到运动路线实现机器自动播种,通过初始化图像采集周期,定期自动对作物植株拍照,并将图片保存后传到用户端,以便于用户通过分析图像信息来进行科学研究;机器自身的智能控制装置通过分析图像信息判断是否需要补种、除杂草,如果需要,机器自动补种和除杂草;通过初始化土壤检测周期,定期检测土壤性质,智能控制装置判断是否需要灌溉,如果需要,机器自动灌溉;整机的自动化程度高,大幅节省了劳动力,通过照相机获取作物生长过程中的性状后进行分析,可以提高采集作物表型的效率和避免表型采集过程中对作物的损害。
附图说明
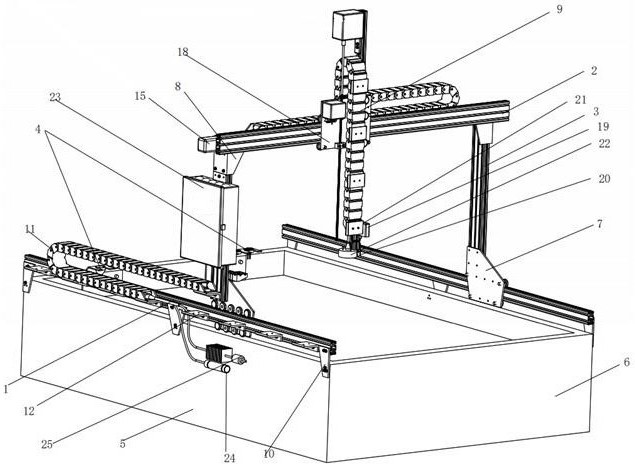
图1为本发明作物生长管理及表型分析综合平台的结构示意图;
图2为本发明作物生长管理及表型分析综合平台的侧视图;
图中所示:
1、X轴轨道,2、Y轴轨道,3、Y轴轨道支架,4、工具台,5、X轴方向支撑板,6、Y轴方向支撑板,7、X轴滑动轮组,8、衔接架, 9、Z轴工作臂,10、衔接板,11、电缆盒,12、电缆盒支架,13、皮带夹,14、皮带套筒,15、第一步进电机,16、GT2滑轮,17、正时皮带,18、Y轴滑动轮组,19、真空泵,20、照相机,21、电磁阀,22、工具适配器,23、智能控制装置,24、水源接口,25、电源接口。
具体实施方式
为能清楚说明本方案的技术特点,下面通过具体实施方式,对本方案进行阐述。
如图1和2所示一种作物生长管理及表型分析综合平台,包括围成种植区域的两X轴方向支撑板5和两Y轴方向支撑板6,以及沿X轴方向移动的龙门架,龙门架上设有位于种植区域上方且沿Y轴方向移动的滑座,所述滑座上安装有沿竖向移动的Z轴工作臂,Z轴工作臂的下端安装有工具适配器和图像采集器。具体的,在两X轴方向支撑板上分别固设有沿X方向延伸的X轴轨道1,两X轴轨道1左右对称设置,X轴轨道通过衔接板10与X轴方向支撑板5固接,X轴轨道的两端分别固接有衔接板10,衔接板10与X轴方向支撑板5固接。在Y轴方向支撑板6上安装有工具台4,工具台上放置有种子盒、种子皿、播种器、除草器、土壤检测器和灌溉器。X轴轨道的前后两端均安装有皮带夹13,在X轴方向支撑板5的外侧安有水源接口24和电源接口25。
龙门架包括左右对称设置的两条Y轴轨道支架3,以及连接两Y轴轨道支架3的Y轴轨道2,其中一条Y轴轨道支架3上安装有智能控制装置23,本实施例的智能控制装置为树莓派,控制机器自动播种、自动补种、自动除草、自动灌溉、自动检测土壤性质、自动拍照以及将拍得照片和检测得到的土壤参数储存并发送给用户端,通过电缆与外接电源相接。Y轴轨道支架3的顶端固接有衔接架8,Y轴轨道2的两端分别与衔接架8固接,且Y轴轨道支架3安装在衔接架8的内侧,Y轴轨道2安装在衔接架8的外侧。Y轴轨道支架3上安装有滑设在X轴轨道上的X轴滑动轮组7,Y轴轨道2和Y轴轨道支架3通过衔接架8连接构成可在X轴轨道上运动的龙门结构。X轴滑动轮组7包括上、下两行V型轮,上、下两行V型轮分别与X轴轨道1上、下两侧的V型槽适配,确保了Y轴轨道支架3、Y轴轨道2及Z轴工作臂9组成的龙门能平稳地在X轴轨道1上运动。Y轴轨道支架的左侧支架的左侧底部装有一个电缆盒支架12,用于连接电缆盒11的一端,电缆盒11的另一端连接在X轴轨道1的左侧第三个电缆盒支架上。
衔接架8上安装有GT2滑轮16和第一步进电机15,第一步进电机的电机轴与GT2滑轮16传动连接,GT2滑轮16上啮合挂设有正时皮带17,正时皮带的褶面绕过GT2滑轮16后,两端向下穿过Y轴轨道支架3,GT2正时皮带17平面的两端分别穿过X轴滑动轮组7上的位于X轴轨道上侧且正对Y轴轨道支架底部的两个V型轮后,分别向X轴轨道1的两端延伸,正时皮带的两端穿过皮带夹13后通过皮带套筒14固定,从而实现对正时皮带两端的固定,以控制X轴方向上的运动。
X轴方向和Y轴方向的电缆放在电缆盒里后安装在各方向轨道的一侧,Z轴工作臂9通过Y轴滑动轮组18连接在Y轴轨道2上,通过第二步进电机的转动,使Z轴工作臂沿Y轴轨道移动,Y轴方向的运动与X轴方向运动的原理一致。Z轴工作臂上还安装有丝杠25和竖向设置的第三步进电机,丝杠的上端与第三步进电机的电机轴通过联轴器24连接,丝杠25上通过螺纹连接有丝杠座26,丝杠座上固接有工作臂体,工具适配器22安装在工作臂体下端,工具适配器按照智能控制装置的不同指令调用工具台上的不同工具以完成相应的操作,工具适配器22的上方安装有真空泵19和电磁阀21,电磁阀通过管道与水源接口24连通,本实施例的图像采集器为照相机20,照相机20安装在工具适配器22的一侧,用于拍照以获取作物生长过程的图片,智能控制装置23通过分析图片获取作物的表型数据,同时智能控制装置23将图片发送到用户端供用户分析研究,智能控制装置23分析照相机20拍摄的照片决定要采取的操作来改善作物的生长环境。通过在Z轴工作臂上设置真空泵,工具适配器拾取到播种器时,真空泵与播种器的吸种针头内腔连通,通过真空泵工作产生的吸力对种子进行吸取。
一种作物生长管理及表型分析综合平台的使用方法,包括如下方面:
1、用户根据作物的种植面积选择材料的尺寸,组装好机器后将机器置于作物种植区域,接好电源与水源,划定好每一株作物的种植位置,将信息导入智能控制种植23,机器根据智能控制装置23指令在初始化的每一株作物的种植位置进行播种。
2、种植区域内的作物发芽后,用户设定好图像采集器的拍照周期,Z轴工作臂定期带动图像采集器对每一个设定的种植位置进行图像采集,并将图像信息经智能控制装置储存后传送到用户端,如果种植位置生长出作物,用户根据图像信息分析作物的性状,进行育种选种,以培育优良品种,如果设定的种植位置未生长出作物,智能控制装置判断为需要补种。
3、当智能控制装置判断为需要补种时,智能控制装置调用Z轴工作臂,按照初始化的调用播种器的运动路线,控制Z轴工作臂移至工具台,通过工具适配器拾取工具台上的播种器,然后通过Z轴工作臂的移动带动播种器移至工具台上的种子盒上方,并按照初始化的取种路线吸取种子盒内的种子,当播种器的吸种针头定位在种子盒的上方时,智能控制装置23启动真空泵19,种子被吸上针头顶端;智能控制装置控制Z轴工作臂移动,带动播种器移至需要补种的种植位置,通过Z轴工作臂的下移进行补种,补种结束后,将播种器送回工具台。智能控制装置按照缺种位置设定好运动路线,智能控制装置根据设定好的运动路线,初始化X、Y、Z轴轨道上的位移,并将指令传给控制X、Y、Z轴方向运动的步进电机,实现精准补种。
4、在作物生长过程中,通过分析图像采集器采集的图像信息判断是否需要除草,如果需要除草,智能控制装置调用Z轴工作臂拾取工具台上的除草器,按照初始化的调用除草器的运动路线,带动除草器移至杂草所在位置除草,除草结束后,将除草器送回工具台。智能控制装置按照杂草所在位置设定好运动路线,智能控制装置根据设定好的运动路线,初始化X、Y、Z轴轨道上的位移,并将指令传给控制X、Y、Z轴方向运动的步进电机,实现精准铲除杂草。
5、智能控制装置根据用户设置的检测土壤性质周期,定期调用 Z轴工作臂拾取土壤检测器,按照初始化的调用土壤检测器的运动路线,利用Z轴工作臂带动土壤检测器移至用户设置的检测位置上方,通过利用Z轴工作臂的下移,使土壤检测器插入土壤,检测土壤参数并存储,智能控制装置接收土壤检测器检测到的数据,并将数据传到用户端,用于用户分析土壤酸碱度、湿度、土壤元素,为改变作物的生长环境提供依据,检测结束后,将土壤检测器送回工具台。
6、智能控制装置根据土壤检测器检测到的土壤湿度,判断是否需要对作物进行灌溉,如果需要灌溉,智能控制装置调用Z轴工作臂拾取灌溉器,Z轴工作臂9按照初始化调用灌溉器的运动路线调用灌溉器,利用Z轴工作臂带动灌溉器移至作物正上方,智能控制装置开启电磁阀21,外部水源就通过灌溉器对作物进行灌溉,灌溉结束后,将灌溉器送回工具台。
当然,上述说明也并不仅限于上述举例,本发明未经描述的技术特征可以通过或采用现有技术实现,在此不再赘述;以上实施例及附图仅用于说明本发明的技术方案并非是对本发明的限制,参照优选的实施方式对本发明进行了详细说明,本领域的普通技术人员应当理解,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换都不脱离本发明的宗旨,也应属于本发明的权利要求保护范围。
- 一种作物生长管理及表型分析综合平台的使用方法
- 一种植物工厂用多光谱作物表型分析平台