一种全天时自动报靶系统及其弹药落点定位方法
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及光电测量技术领域,是一种全天时自动报靶系统及其弹药落点定位方法。
背景技术
对地突击训练是作战人员军事作战能力的重要手段。以对地突击训练为例,机载平台挂载弹药,按照训练计划进行飞行训练,依据军事学习理论及作战策略,作战人员在适当的空中位置,对准地面靶标投掷弹药,弹药在空中快速飞行,最后在地球引力的作用下落至靶场地面上。此时,采用各种技术手段获取弹药落点位置、进行报靶,成为评估训练中作战方法、作战策略的有效途径。通过报靶,为对地突击训练提供量化指标,可帮助作战人员及时进行相应调整,以优化训练效果,节省训练成本。
基于成像观测系统获取空中投掷目标落点空间位置,最直观、最直接的传统实现方法是,首先采用图像算法在目标落地后的观测图像中,检测目标落点像素位置;然后基于多个测站目标落点像素位置,采用侧向交会等数学模型,推导目标落点的三维空间位置。然而,对于机载弹药对地对地突击等军事训练应用而言,弹药目标落地后发生爆炸,这将导致基于上述传统方法无法在测站图像中较精确地定位目标落地像素位置,以此估算出的目标落点三维空间位置会存在很大误差。
发明内容
本发明为了实现弹药落点定位,本发明提供了一种全天时自动报靶系统及其弹药落点定位方法,本发明提供了以下技术方案:
一种全天时自动报靶系统,所述系统包括:GPS定位设备、主控机和第一测站;
所述主控机连接GPS定位设备,所述主控机包括综合评估单元、双站定位单元、显控单元、主控网络通讯单元和主控时统控制单元,综合评估单元与显控单元进行交互,所述主控时统控制单元与显控单元进行交互,所述双站定位单元与显控单元进行交互,所述主控网络通讯单元与显控单元进行交互;
所述第一测站包括第一电动云台、第一时统控制单元、第一GPS单元、第一云台控制单元、第一高速数字信号处理单元、第一可见光相机、第一红外相机、第一电源单元和第一网络通讯单元,所述主控网络通讯单元与第一云台控制单元进行交互,所述第一云台控制单元分别连接第一电动云台、第一高速数字信号处理单元和第一电源单元,所述第一高速数字信号处理单元分别连接第一时统控制单元和第一网络通讯单元,所述第一时统控制单元连接第一GPS单元,所述第一高速数字信号处理单元连接第一可见光相机和第一红外相机。
优选地,所述系统还包括第二测站,所述第二测站包括第二电动云台、第二时统控制单元、第二GPS单元、第二云台控制单元、第二高速数字信号处理单元、第二可见光相机、第二红外相机、第二电源单元和第二网络通讯单元,所述主控网络通讯单元与第二云台控制单元进行交互,所述第二云台控制单元分别连接第二电动云台、第二高速数字信号处理单元和第二电源单元,所述第二高速数字信号处理单元分别连接第二时统控制单元和第二网络通讯单元,所述第二时统控制单元连接第二GPS单元,所述第二高速数字信号处理单元连接第二可见光相机和第二红外相机。
一种全天时自动报靶弹药落点定位方法,包括以下步骤:
步骤1:获取红外相机瞬时视场IFOV和云台步进值Step;
步骤2:对报靶系统进行布设,并采集GPS位置信息;
步骤3:对相机进行调平、指北操作,记录相机观测方位角和俯仰角基准参数;
步骤4:通过红外相机对靶场靶标进行持续观测,根据弹药的目标形状、灰度分布和运动特征,进行目标检测跟踪,输出二维图像中目标运动位置像素值、观测云台方位码和俯仰码;
步骤5:主控机对各测站目标二维轨迹进行时空配准和交叉定位,生成弹药空中三维运动轨迹;
步骤6:基于弹药目标空中运动三维轨迹及靶标GPS信息,预测目标落点位置,并生成报靶信息。
优选地,所述步骤1中云台步进值Step为一个云台码值对应的转动角度,单位为°。
优选地,所述步骤2具体为:
基于无源交叉定位误差和靶场,布设靶标、测站塔和指北参考点;采集靶标、测站相机、指北参考点的GPS坐标信息,进行坐标投影映射,将GPS坐标转变为地理坐标系下的直角坐标;地理坐标系以东为X轴正向、以北为Y轴正向,右手系确定Z轴正向,以某个相机位置为坐标原点,对于双站交叉定位而言,以左测站相机位置为坐标原点。
优选地,所述步骤3具体为:
安装红外相机及云台,进行调平,记录调平后云台俯仰码值Mb0;调整云台,使相机观测到指北参考点,记录下云台方位码值Ma0,参考点在像平面x方向上的像素值x0;对于人为布设指北参考点,结合相机与参考点的地理坐标,计算相机对参考点的观测方向在地理坐标系下的方位角θ0,而对于以北极星为指北参考点的情况,可认为相机对北极星的观测方向在地理坐标系下的方位角θ0=0,通过下式计算θ0:
NSXYZ.X=NXYZ.X-SXYZ.X;
NSXYZ.Y=NXYZ.Y-SXYZ.Y;
NSXYZ.Z=NXYZ.Z-SXYZ.Z;
其中,SXYZ表示相机的地理坐标,由相机GPS坐标投影映射而来,SXYZ.X、SXYZ.Y、SXYZ.Z分别表示相机地理坐标的三个分量;NXYZ表示指北参考点的地理坐标,NXYZ.X、NXYZ.Y、NXYZ.Z分别表示参考点地理坐标的三个分量,NSXYZ表示相机对参考点的观测向量的地理坐标,NSXYZ.X、NSXYZ.Y、NSXYZ.Z分别表示观测向量地理坐标的三个分量;sqrt()表示开根号运算,acosd()表示反三角余弦运算,返回角度以°为单位;(Ma0,x0,θ0,Mb0)构成了该相机观测方位角、俯仰角基准参数。
优选地,所述步骤4具体为:
红外相机对靶场靶标进行持续观测,根据弹药目标形状、灰度分布和运动特征,进行目标检测、跟踪,输出二维图像中目标运动位置像素值(x,y),以及观测时云台方位码Ma、俯仰码Mb。
优选地,所述步骤5具体为:
步骤5.1:在相机图像目标检测结果(x,y,Ma,Mb)的基础上,结合相机瞬时视场IFOV、云台步进值Step测量值,以及中相机观测方位角、俯仰角基准测量参数(Ma0,x0,θ0,Mb0),参照下式计算各测站相机Si对目标观测向量的方位角θi和俯仰角βi,其中i是测站相机的标号,i≥2,通过下式表示方位角θi和俯仰角βi:
θi=theta0+(x-x0)*IFOV+(Ma-Ma0)*Step;
βi=-(y-y0)*IFOV+(Mb-Mb0)Step;
其中,y0表示相机中心的y坐标,该公式以原点位于左上角、向右为x轴正向,向下为y轴正向的图像坐标系为计算基础,但本发明不限定图像坐标系的定义方式,对于其他方式定义的图像坐标系,只需参照该公式进行相应调整即可;
步骤5.2:基于多个测站,相机对目标位置观测向量的方位角θi、俯仰角βi,结合步骤获取的测站地理坐标,在时空配准的前提下,进行交叉定位计算,获取观测时刻各目标空中位置三维坐标,以双站交叉定位为例,基于左站相机对目标观测向量的方位角θ1、俯仰角β1,右站相机对目标观测向量的方位角θ1、俯仰角β2,以及左右测站相机地理坐标(S1X,S1Y,S1Z)、(S2X,S2Y,S2Z),获取观测时刻t目标运动位置P
其中,sind()、tand()分别为三角正弦函数、三角正切函数,函数输入单位为°;
步骤5.3:基于持续观测的相机图像,重复上述步骤5.1至步骤5.2,实现对弹药目标空中各个位置的三维定位,生成弹药目标空中运动三维轨迹{Pt,t=1,2,…m},其中,m表示弹药目标空中运动时同时出现在左右测站相机视场中的次数,当弹药落地爆炸或者飞出视场时,停止目标三维轨迹更新。
优选地,所述步骤6具体为:
步骤6.1:基于目标空中运动三维轨迹跟踪结果,建立地理坐标系下,通过下式表示目标轨迹末端运动直线的三维空间方程:
其中,(P
步骤6.2:基于靶场靶标GPS坐标中的高程值Z
Z
步骤6.3:基于弹药落点定位结果(X
dist=sqrt((X
其中,dist表示弹药落点与靶标之间的平面距离,α
本发明具有以下有益效果:
本发明公开一种全天时自动报靶系统及其弹药落点定位方法,以红外相机无源交叉定位为基础,引入GPS定位技术,对测站、靶标、参考点进行GPS定位,以此为基础建立无源交叉定位模型,相比于基于对瞄方式的测站定位技术而言,该系统不要求测站相互可见,不要求相机对靶标成像清晰,能快速适应靶场靶标增改的情况,系统对工作环境限制条件少,适用性强,而且便于生成具有指导性的完整报靶信息,实现全天时自动报靶。
本发明公开一种全天时自动报靶系统及其弹药落点定位方法,避开直接对落地帧的图像处理,通过跟踪生成弹药目标三维空中运动轨迹,进行弹药落点定位、报靶,避免了因落地爆炸使弹药落点像素点定位不准而引入的测量误差。它首先对各测站红外图像进行预处理、目标检测、轨迹关联,获取各测站图像平面上目标二维空中运动轨迹;然后,在时空配准的基础上,基于侧向交叉定位数学模型,跟踪生成目标三维空中运动轨迹;最后,根据靶标GPS信息,进行弹药落点定位、报靶,定位精度高、报靶信息完整。本发明公开的方法,不仅能获取常规空中目标的落点空间位置,而且能获取弹药等特殊空中目标的落点空间位置,是一种适用性更强的目标落点位置获取方法,思想巧妙、可实现性强。
综上,本发明公开一种全天时自动报靶系统及其弹药落点定位方法,该系统不要求测站相互可见,对工作环境限制条件少,适用性强,其弹药落点定位方法定位精度高、报靶信息完整,整体思想巧妙、可实现性强。
本发明的目的在于公开一种全天时自动报靶系统及其弹药落点定位方法,该系统以红外相机无源交叉定位为基础,引入GPS定位技术,进行全天时、自动报靶,且对工作环境限制条件少,适用性强。该系统的弹药落点定位方法,避开直接对落地帧的图像处理,巧妙地通过目标空中运动轨迹三维跟踪,预测目标落点三维空间位置,满足弹药对地突击训练评估等应用需求。
附图说明
图1所示是一种全天时自动报靶系统示意图
图2所示是本发明公开的全天时自动报靶系统工作示意图,图中:1--靶场靶标,2--人为设置的指北参考点,3--红外相机及云台,4--主控机,5--高精度GPS定位设备。
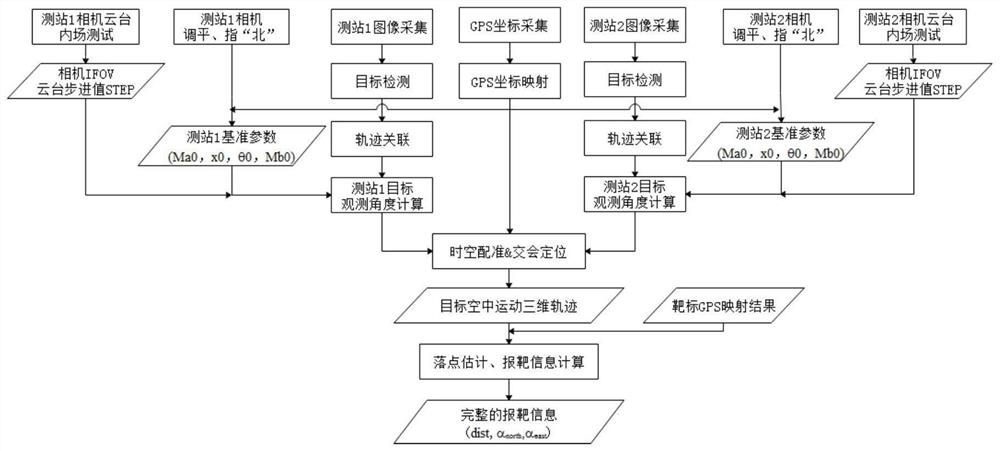
图3所示是本发明公开的全天时自动报靶系统及其弹药落点定位方法的工作流程图,图中以两个测站为例,进行系统工作流程说明。
具体实施方式
以下结合具体实施例,对本发明进行了详细说明。
具体实施例一:
根据图1所示,一种全天时自动报靶系统,所述系统包括:GPS定位设备、主控机和第一测站;
所述主控机连接GPS定位设备,所述主控机包括综合评估单元、双站定位单元、显控单元、主控网络通讯单元和主控时统控制单元,综合评估单元与显控单元进行交互,所述主控时统控制单元与显控单元进行交互,所述双站定位单元与显控单元进行交互,所述主控网络通讯单元与显控单元进行交互;
所述第一测站包括第一电动云台、第一时统控制单元、第一GPS单元、第一云台控制单元、第一高速数字信号处理单元、第一可见光相机、第一红外相机、第一电源单元和第一网络通讯单元,所述主控网络通讯单元与第一云台控制单元进行交互,所述第一云台控制单元分别连接第一电动云台、第一高速数字信号处理单元和第一电源单元,所述第一高速数字信号处理单元分别连接第一时统控制单元和第一网络通讯单元,所述第一时统控制单元连接第一GPS单元,所述第一高速数字信号处理单元连接第一可见光相机和第一红外相机。
所述系统还包括第二测站,所述第二测站包括第二电动云台、第二时统控制单元、第二GPS单元、第二云台控制单元、第二高速数字信号处理单元、第二可见光相机、第二红外相机、第二电源单元和第二网络通讯单元,所述主控网络通讯单元与第二云台控制单元进行交互,所述第二云台控制单元分别连接第二电动云台、第二高速数字信号处理单元和第二电源单元,所述第二高速数字信号处理单元分别连接第二时统控制单元和第二网络通讯单元,所述第二时统控制单元连接第二GPS单元,所述第二高速数字信号处理单元连接第二可见光相机和第二红外相机。
系统以红外相机无源交叉定位为基础建立无源交叉定位模型,实现弹药落点定位、报靶功能。系统包括主控机、测站以及高精度GPS定位设备。
其中主控机中所述显控单元用于实时数据的采集显示和设备控制;所述主控时统控制单元用于对测站实施同步控制;所述双站定位单元用于接收测站的目标信息,生成目标三维空中运动轨迹和弹着点坐标;所述综合评估单元可对训练数据进行分析、记录和评估;所述主控网络通讯单元实现与远程各个测站的网络通信。
测站中所述电源单元为所有设备提供稳定供电;所述云台控制单元实现对电动云台的实时控制;所述时统控制单元接收主控机的同步命令,同时接收GPS单元的时间信息,实现各个测站设备的同步功能;所述高速数字处理单元接收可见光相机和红外相机的实时数据,对红外图像进行预处理、目标检测、轨迹关联,获取测站图像平面上目标二维空中运动轨迹;所述网络通讯单元实现与主控机的网络通信。
所述高精度GPS定位设备用于采集靶场靶标、各测站、指北参考点(仅限人为布设参考点)的GPS信息。
本发明以红外相机无源交叉定位为基础,引入GPS定位技术,对测站、靶标、参考点进行GPS定位,以此为基础建立无源交叉定位模型,降低了系统对工作环境的限制条件、增强了系统适用性;红外相机对靶场进行持续观测,通过对各测站红外图像进行预处理、目标检测、轨迹关联、时空校准、交叉定位,跟踪生成弹药目标三维空中运动轨迹,在弹药落地爆炸后,根据靶标GPS信息,进行弹药落点定位、报靶,避免了因落地爆炸使弹药落点像素点定位不准而引入的测量误差。该报靶系统对工作环境限制条件少,可扩展性与适用性强,便于生成具有指导性的报靶信息,且定位方法精度高,适于靶场推广应用。
根据图2至图3所示,本发明提供一种全天时自动报靶系统及其弹药落点定位方法,一一种全天时自动报靶系统及其弹药落点定位方法,所述装置包括:牲畜可穿戴设备、太阳能供电装置、电源控制装置和系统功能装置;
1、本发明公开的全天时自动报靶系统工作示意图如图1所示,该系统主要包括:
(1-1)靶场靶标(1),靶标位于平地或山顶,靶标直径会随对地突击弹药种类的不同而有所变化;
(1-2)指北参考点(2),北极星或人为设置的、红外相机可观测的参考点;
(1-3)红外相机及云台(3),数量不小于两个,相机视场覆盖靶直径的1.5倍,在误差理论分析的基础上,将其布设在理想的测站塔上,对视场范围进行持续观测,获取靶场红外图像,云台带动相机可以实现对多个靶标进行切换观测;
(1-4)主控机(4),控制红外相机同步工作,并接收红外相机采集的红外图像,进行图像处理、算法分析,定位到弹药落点三维空间位置,生成报靶信息;
(1-5)高精度GPS定位设备(5),用于采集靶场靶标、各测站塔上的红外相机、指北参考点(仅限人为布设参考点)的GPS信息;
2、基于本发明公开的全天时自动报靶系统及其弹药落点定位方法的靶场报靶,其工作流程图如图2所示,包含以下步骤:
(2-1)红外相机及云台内场测试
通过内场测试,获取各红外相机瞬时视场IFOV、云台步进值Step,其中云台步进值Step表示一个云台码值对应的转动角度(单位为°);
(2-2)报靶系统布设及GPS位置信息采集
基于无源交叉定位误差理论分析,结合靶场实际条件,合理地布设靶标、测站塔、指北参考点;采集靶标、测站相机、指北参考点(仅限人为布设参考点)的GPS坐标信息,进行坐标投影映射,将GPS坐标转变为地理坐标系下的直角坐标;地理坐标系以东为X轴正向、以北为Y轴正向,右手系确定Z轴正向,以某个相机位置为坐标原点,对于双站交叉定位而言,往往以左测站相机位置为坐标原点;
(2-3)相机调平、指“北”操作,记录相机观测方位角、俯仰角基准参数
安装红外相机及云台,进行调平,记录调平后云台俯仰码值Mb0;调整云台,使相机能观测到指北参考点,记录下云台方位码值Ma0,以及参考点在像平面x方向上的像素值x0;对于人为布设指北参考点,还需结合相机与参考点的地理坐标,计算相机对参考点的观测方向在地理坐标系下的方位角θ0,其计算公式如式(1),而对于以北极星为指北参考点的情况,可认为相机对北极星的观测方向在地理坐标系下的方位角θ0=0:
NSXYZ.X=NXYZ.X-SXYZ.X;
NSXYZ.Y=NXYZ.Y-SXYZ.Y;
NSXYZ.Z=NXYZ.Z-SXYZ.Z;
式(1)中SXYZ表示相机的地理坐标,由相机GPS坐标投影映射而来,SXYZ.X、SXYZ.Y、SXYZ.Z分别表示相机地理坐标的三个分量;同样地,NXYZ表示指北参考点的地理坐标,NXYZ.X、NXYZ.Y、NXYZ.Z分别表示参考点地理坐标的三个分量,NSXYZ表示相机对参考点的观测向量的地理坐标,NSXYZ.X、NSXYZ.Y、NSXYZ.Z分别表示观测向量地理坐标的三个分量;sqrt()表示开根号运算,acosd()表示反三角余弦运算,返回角度以°为单位;(Ma0,x0,θ0,Mb0)构成了该相机观测方位角、俯仰角基准参数;
(2-4)红外图像目标检测、轨迹关联
红外相机对靶场靶标进行持续观测,根据弹药目标形状特点、灰度分布特点、运动特点,设计合适的图像算法进行目标检测、跟踪,输出二维图像中目标运动位置像素值(x,y),以及观测时云台方位码Ma、俯仰码Mb;
(2-5)主控机对各测站目标二维轨迹进行时空配准、交叉定位,生成弹药空中三维运动轨迹
首先,在相机图像目标检测结果(x,y,Ma,Mb)的基础上,结合(2-1)中相机瞬时视场IFOV、云台步进值Step测量值,以及(2-3)中相机观测方位角、俯仰角基准测量参数(Ma0,x0,θ0,Mb0),参照下式计算各测站相机Si对目标观测向量的方位角θi、俯仰角βi,其中i是测站相机的标号,i≥2:
θi=theta0+(x-x0)*IFOV+(Ma-Ma0)*Step;
βi=-(y-y0)*IFOV+(Mb-Mb0)Step; (2)
式(2)中,y0表示相机中心的y坐标,该公式以原点位于左上角、向右为x轴正向,向下为y轴正向的图像坐标系为计算基础,但本发明不限定图像坐标系的定义方式,对于其他方式定义的图像坐标系,只需参照该公式进行相应调整即可;
其次,基于多个测站(≥2)相机对目标位置观测向量的方位角θi、俯仰角βi,结合步骤(2-2)中获取的测站地理坐标,在时空配准的前提下,进行交叉定位计算,获取观测时刻各目标空中位置三维坐标,以双站交叉定位为例,基于左站相机对目标观测向量的方位角θ1、俯仰角β1,右站相机对目标观测向量的方位角θ1、俯仰角β2,以及左右测站相机地理坐标(S1X,S1Y,S1Z)、(S2X,S2Y,S2Z),参照式(3),即可获取观测时刻t目标运动位置P
式(3)中sind()、tand()分别为三角正弦函数、三角正切函数,函数输入单位为°;
最后,基于持续观测的相机图像,重复上述两个步骤,实现对弹药目标空中各个位置的三维定位,生成弹药目标空中运动三维轨迹{Pt,t=1,2,…m},其中m表示弹药目标空中运动时同时出现在左右测站相机视场中的次数,当弹药落地爆炸或者飞出视场时,停止目标三维轨迹更新;
(2-6)基于弹药目标空中运动三维轨迹,及靶标GPS信息,预测目标落点位置,并生成报靶信息
首先,基于目标空中运动三维轨迹跟踪结果,建立地理坐标系下,目标轨迹末端运动直线的三维空间方程:
式(4)中(P
然后,基于靶场靶标GPS坐标中的高程值Z
Z
最后,基于弹药落点定位结果(X
dist=sqrt((X
其中dist表示弹药落点与靶标之间的平面距离,α
以上所述仅是一种全天时自动报靶系统及其弹药落点定位方法的优选实施方式,一种全天时自动报靶系统及其弹药落点定位方法的保护范围并不仅局限于上述实施例,凡属于该思路下的技术方案均属于本发明的保护范围。应当指出,对于本领域的技术人员来说,在不脱离本发明原理前提下的若干改进和变化,这些改进和变化也应视为本发明的保护范围。
- 一种全天时自动报靶系统及其弹药落点定位方法
- 一种地雷的落点定位方法、控制中心、地雷及布雷系统