用于警告车辆驾驶员的设备和方法
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及一种用于警告车辆的驾驶员的设备和方法,其中,所述车辆具有一个或多个环境传感器,所述环境传感器探测车辆周围环境中的对象,并且设置有评估装置,在所述评估设备中由一个或多个环境传感器的对象探测产生环境模型,并且设置有致动机构,所述致动机构向驾驶员通知环境模型的识别出的对象,其方式是:所述致动机构包含空间警告信息用于驾驶员信息并且以触觉方式向驾驶员通知所述对象的位置。
背景技术
由DE 10 2014 226 744 A1已知一种用于通过车辆的车道保持辅助系统输出警告的方法,在该方法中读取配属于车辆的行驶状况的威胁等级,并且在另一步骤中根据威胁等级调设用于警告车辆驾驶员的警告信号的强度。在此,以在调设步骤中调设的强度生成警告信号。
发明内容
本发明的核心是,给出一种设备和一种所属的方法,利用所述方法可以给出一种用于驾驶员信息的致动机构,该致动机构包含空间警告信息并且以触觉方式向驾驶员通知对象的位置或方向。
根据本发明,这通过独立权利要求的特征来解决。由从属权利要求得出有利的扩展方案和构型。
有利地设置,评估装置设置用于由环境模型求取探测到的对象相对于车辆的相对位置和/或空间方向。在此,相对位置例如可以在X-Y坐标系内给出,其中,坐标原点位于本车辆内。探测到的对象的空间方向例如可以是探测到的对象相对于本车辆纵轴的方位角。然后可以以0°和360°之间的角度值来给出该空间方向。
在此,为了创建环境模型,除了相对于本车辆的对象坐标或相对于本车辆的对象方向之外,替代地或附加地还可以使用其他参量,这些参量可以选择式地借助环境传感器直接被测量或者可以由已经存在的测量参量被求取。因此,例如可以选择式地直接测量对象的相对速度,或者由对象与本车辆的距离值的时间导数来计算对象的相对速度。除了相对速度外,替代地或作为补充地,也可以考虑其他参量,例如对象大小、对象后向散射横截面、对象表面特性或任何其他可测量的值。
此外有利的是,用于驾驶员信息的致动机构由驾驶员座椅中和/或方向盘中的大量振动致动器组成。
此外有利的可以是,用于驾驶员信息的致动器信号这样实施,使得驾驶员座椅中和/或方向盘中的大量振动致动器可以单独地被激活或停用和/或可以以在其强度和/或频率方面可改变的方式被操控。例如,可以在驾驶员座椅的地板区域中安装多个、例如10或12个振动致动器,其中,这些振动致动器在座椅框架的左侧和右侧分布在前座椅端和后座椅端之间。由此,可以通过操控一个振动致动器或多个相邻的振动致动器向坐在驾驶员座椅上的驾驶员告知触觉的方向信息。
替代于驾驶员座椅中和/或方向盘中的振动致动器或驾驶员座椅中和/或方向盘中的振动致动器的组合,还有利的是,在油门踏板中和/或制动踏板中和/或驾驶员座椅的扶手中和/或驾驶员座椅的颈托中设置振动致动器,所述振动致动器也可以单独地被激活、停用和/或在其振动频率方面可改变或能以振动模式来操控。由此,能够直观地向驾驶员指出不同的行驶状况,其方式例如是:仅将颈托置于振动中或可以仅将驾驶员座椅的左扶手或右扶手置于振动中。
有利地,也可以激活在多个安装位置上的振动致动器,例如以便以特别紧急的方式指出特别危急的行驶状况。
此外有利的是,对驾驶员座椅和/或方向盘中的大量振动致动器的操控这样进行,使得由于激活的致动器而产生座椅或方向盘的振动,所述振动以触觉的方式告知驾驶员与识别到的对象的空间位置相应的方向。如果座椅中或方向盘中的振动致动器沿以下方向被激活或者多个相邻的致动器沿以下方向被激活,在该方向上相对于车辆纵轴而言在车辆周围环境中识别到对象,则驾驶员除了特殊的周围状况外也可以附加地直观地获知该方向信息,而驾驶员不必阅读光学的显示器,也不必等待声音通知结束并从而从驾驶情况转移注意力。
此外有利的是,所述一个或多个环境传感器由一个或多个雷达传感器,一个或多个超声波传感器,一个或多个激光雷达传感器,一个或多个视频传感器或它们的组合组成。有利地,在车辆周围安装了如此多的传感器,使得车辆周围环境被全方位地或至少在一个感兴趣的角度范围内被感测。在此,多个区域可以被不同或相同类型的传感器覆盖,或者角度范围可以被不同传感器这样覆盖,从而可以执行对对象探测的冗余和可信性验证。
替代于所列举的传感器类型或与之的组合,也可以设置车对X接口作为环境传感器。借助这种车对X接口,可以在车辆外部接收传感器的数据,并且如通过自己的传感器获得的数据那样对传感器的数据进行处理。因此,在车辆附近行驶的其他车辆的环境传感器例如可以经由车对X接口提供来自其环境传感器的数据。为此,可以进行从车辆到车辆的传输,或者可以通过中间接入数据传输服务将这些数据从另一车辆传输给数据服务器,并在进一步的步骤中从数据服务器传输给本车辆。还可以想到的是,附加地或替代地使用来自位置固定地紧固在基础设施装置上的环境传感器的数据,并且例如监视高速公路的硬路肩或提供在道路交叉口处的对象数据。这些数据还可以经由车对X接口传输到车辆中。
此外,数据也可以选择式地经由车对X接口传输到车辆中,所述数据来自环境模型,并且在数据服务器中通过在本车辆的周围环境中收集对象数据已被求取并汇总成交通环境模型。这种环境模型数据也可以用作根据本发明的功能的输入数据。
此外有利的是,当新识别到对象、识别到车辆周围环境中的运动对象超越本车辆、识别到车辆周围环境中的运动对象被本车辆超越、识别到本车辆被车辆周围环境中的运动对象威胁、识别到运动对象以危急的方式接近本车辆、或者识别到上述这些环境状况的组合时,将关于对象方向的驾驶员信息输出给振动致动器。通常,当环境状况改变或这样改变,从而不能确保驾驶员已识别到该改变的环境状况时,应该始终向驾驶员告知对象的方向。
此外有利的是,对于不同的环境状况,以不同的频率和/或借助不同的振动模式来操控致动器。在此,不同的振动模式可以这样构型,使得接通信号和关断信号的序列彼此跟随,类似于二进制代码或莫斯代码,并且进行振动强度的改变,或者例如根据对象的威胁或大小来操控致动器的振动频率。由此,可以向驾驶员直观地告知不同的环境状况,并指出识别到的对象的威胁程度或类型。
该方法例如可以以软件或硬件或以软件和硬件的混合形式例如在控制器中实现。
此处提出的方案还实现一种距离调节器,该距离调节器构造为用于在相应的装置中执行、操控或实现此处提出的方法的变型的步骤。
距离调节器可以是一种电器具,其具有至少一个用于处理信号或数据的处理单元,至少一个用于存储信号或数据的存储单元和至少一个接口和/或一个通信接口,用于读取或输出嵌入通信协议中的数据。该计算单元例如可以是信号处理器,所谓的系统ASIC或微控制器,用于处理传感器信号并根据传感器信号来输出数据信号。该存储单元例如可以是闪存,EPROM或磁存储单元。该接口可以实施为用于从传感器读取传感器信号的传感器接口和/或实施为用于向致动器输出数据信号和/或控制信号的致动器接口。通信接口可以构造为用于无线和/或有线地读取或输出数据。接口也可以是例如与其他软件模块并立于微控制器上的软件模块。
具有程序代码的计算机程序产品或计算机程序也是有利的,所述程序代码可以存储在机器可读的载体或存储介质、例如半导体存储器、硬盘或光学存储器上并用于尤其当该程序产品在计算机、可编程的控制器或类似设备上执行时执行、实现和/或操控根据上述实施方式之一所述的方法的步骤。
应指出的是,这里参考不同的实施方式作为用于调节距离的方法和作为距离调节器来描述本发明的可能的特征和优点中的一些。本领域技术人员认识到,可以以适当的方式组合、匹配或更换这些特征,以便获得本发明的其他实施例。
附图说明
下面参考附图阐述本发明的实施例。附图示出:
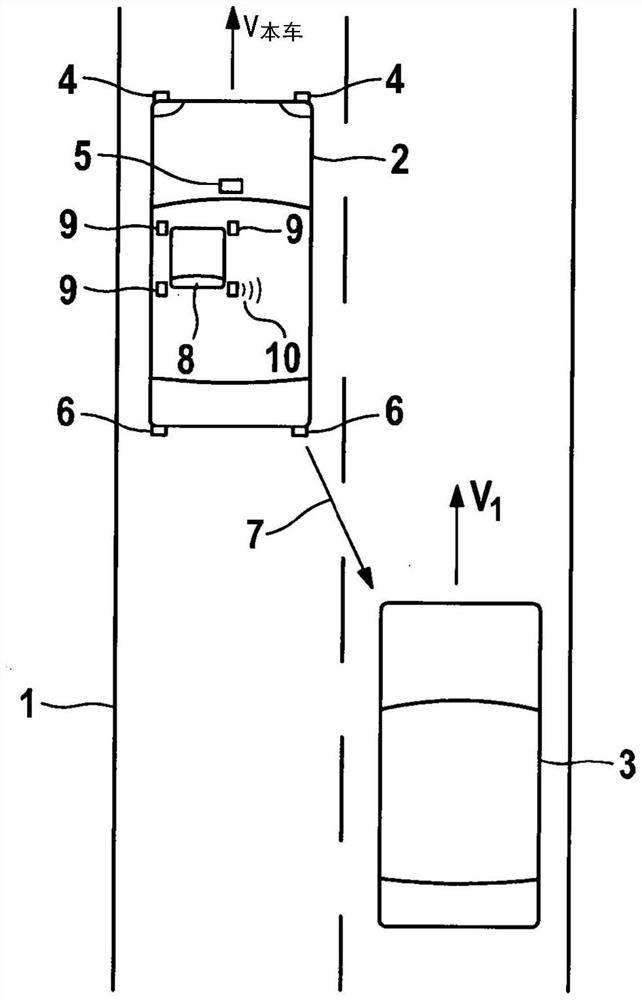
图1示出行驶状况的示意性俯视图,以阐述根据本发明的设备和根据本发明的方法;
图2示出根据本发明的设备的实施方式的示意性方框图;并且
图3示出用于阐述根据本发明的方法的示意性流程图。
具体实施方式
在图1中示出了多车道道路1的俯视图,本车辆2在该多车道道路上以速度V
在图2中示出了示意性方框图。该方框图示出了具有输入电路21的评估装置20。借助输入电路21可以将输入信号25馈送给评估装置20。这些输入信号25尤其来自环境传感器4、5、6,这些环境传感器例如可以实现为雷达传感器、视频传感器、激光雷达传感器或超声波传感器。这些环境传感器安装在车辆前部、车辆后部以及必要时安装在车辆侧面上并且可以监视整个车辆周围环境。有利地,通过不同类型的环境传感器来监视相同的空间区域,从而确保了对象探测的可信性验证和冗余。环境传感器4、5、6例如可以具有其自己的控制器,在该控制器中进行对象探测和信号处理,并且该控制器将对象列表作为输入信号25馈送给评估装置20。替代地或组合地,可以将传感器原始信号作为输入信号25馈送给处理装置20,并且在评估装置20中对原始信号进行评估。馈送给输入电路21的输入信号25经由例如可以实施为总线系统的数据交换装置26馈送给计算装置27,在该计算装置中,根据本发明的方法作为软件来运行并且由输入信号求取环境模型37,由环境模型37求取探测到的对象3的相对位置或另一对象3的方位角方向,并将它们作为输出信号经由数据交换装置26馈送给输出端电路28。借助输出电路28将评估装置20的输出信号29输出给下游的执行机构9、10、30。输出信号29例如被输出给安装在本车辆20的方向盘上的振动致动器30。由此,可以将方向盘或方向盘的一部分置于振动中以及可以借助振动频率、振动模式向驾驶员以及置于振动中的方向盘区段告知方向和周围状况,从而该驾驶员能够直观地获知周围状况。此外,替代地或附加地,可以将输出信号29输出给座椅致动器9、10,其中,这些座椅致动器由多个振动致动器组成,并且驾驶员能够通过所述座椅致动器的单独操控借助振动模式和振动频率获知周围情况。
在图3中示出了根据本发明的方法的示意性方框图。该方框图以步骤35通过开始该方法为开始,例如在激活本车辆2的点火时或者在激活集成在车辆2中的特定驾驶员辅助功能时。在随后的处理步骤36中,从环境传感器4、5、6读取对象数据,或者从这些本地环境传感器4、5、6的本地控制器读取对象数据。在随后的步骤37中,求取对象、对象位置及其相对于本车辆2的方位角方向。在使用不同的环境传感装置,例如雷达和超声波或者雷达和视频或者视频和激光雷达或者其他组合的情况下,在该步骤36中附加地可以进行传感器数据融合,在该传感器数据融合中,将不同传感器类型的对象数据输入共同的环境模型37中,并且对对象进行可信性验证。在随后的步骤38中,对评估步骤37的环境模型进行评估并且求取是否存在特殊的环境状况,尤其是本车辆2与其他对象3的特定行驶状况。在此例如求取,是否探测到新识别出的对象3,是否另一对象3正在超越或不久将会超越本车辆2,是否存在本车辆2危险地接近另一对象3,或者是否存在其他环境状况,在该环境状况下,应向驾驶员告知车辆周围环境中的其他对象3。由对这种环境状况的识别,可以将特殊的频率模式配属于一些状况或者可以配属特殊的振动模式并且产生输出信号29,这些信号在随后的步骤39中由评估装置20输出给下游的执行机构9、10、30。在此,可以激活单个振动致动器,或者多个、尤其是相邻的振动致动器,以便向驾驶员告知方向信息。此外,振动致动器可以在振动模式方面被控制,或者可以借助不同的振动频率来操控,从而还可以直观地向驾驶员告知特定的环境状况及其关于自己的交通状况方面的严重性。在将输出信号29输出给下游的执行机构9、10、30之后,根据本发明的方法以步骤36继续实施,其方式是:重新完整执行步骤36至39,在此应基于环境模型37的暂时改变和与此相关的环境状况的暂时改变以其他频率和/或其他模式来操控其他振动致动器。
- 用于向车辆驾驶员警告有倾翻危险的方法和用于此的控制设备
- 用于警告车辆驾驶员的方法和警告装置以及车辆