一种基于三维激光雷达的破波带波浪水动力监测方法及其系统
文献发布时间:2023-06-19 12:08:44
技术领域
本发明涉及一种基于三维激光雷达的破波带波浪水动力监测方法及其系统,属于海洋观测技术领域。
背景技术
破波带是近岸波浪最活跃的区域,在破波带中有波浪传播变形和破碎现象,而波浪的传播变形和破碎对岸滩爬高、岸线演变、海洋安全都有重要的影响,因此获取破波带波面数据显得尤为重要。然而,由于波浪破碎过程迅速、破碎点随时间不断变化,目前想要通过现场观测获取破波带的高分辨率数据还很困难。
传统的海洋监测方法主要包括船舶监测、浮标监测和雷达监测,船舶监测消耗人力物力,难以实现长期连续观测;浮标监测采用自动化监测,可以实现定点长期观测,但抗风浪能力不足、受海洋天气影响、浮标电池持续力和耐腐蚀性不足;雷达监测是近年来发展的声学监测技术,无需在海里安装仪器,测量结果可靠性增强,但雷达图像提取参数较为困难。更为重要的是,以上监测方法主要是采用单点测量,且不能直接获得波形,不能有效获取破碎点的位置,也不能对局部海域波浪进行高精度和高分辨率的二维连续观测,难以被应用到破波带波浪水动力监测中。
发明内容
为了解决现有技术中破波带波浪水动力监测困难的问题,本发明提出了一种基于三维激光雷达的破波带波浪水动力监测方法及其系统,实现高精度、高分辨率的破波带波浪水动力要素连续监测。
为解决上述技术问题,本发明采用了如下技术手段:
第一方面,本发明提出了一种基于三维激光雷达的破波带波浪水动力监测方法,包括如下步骤:
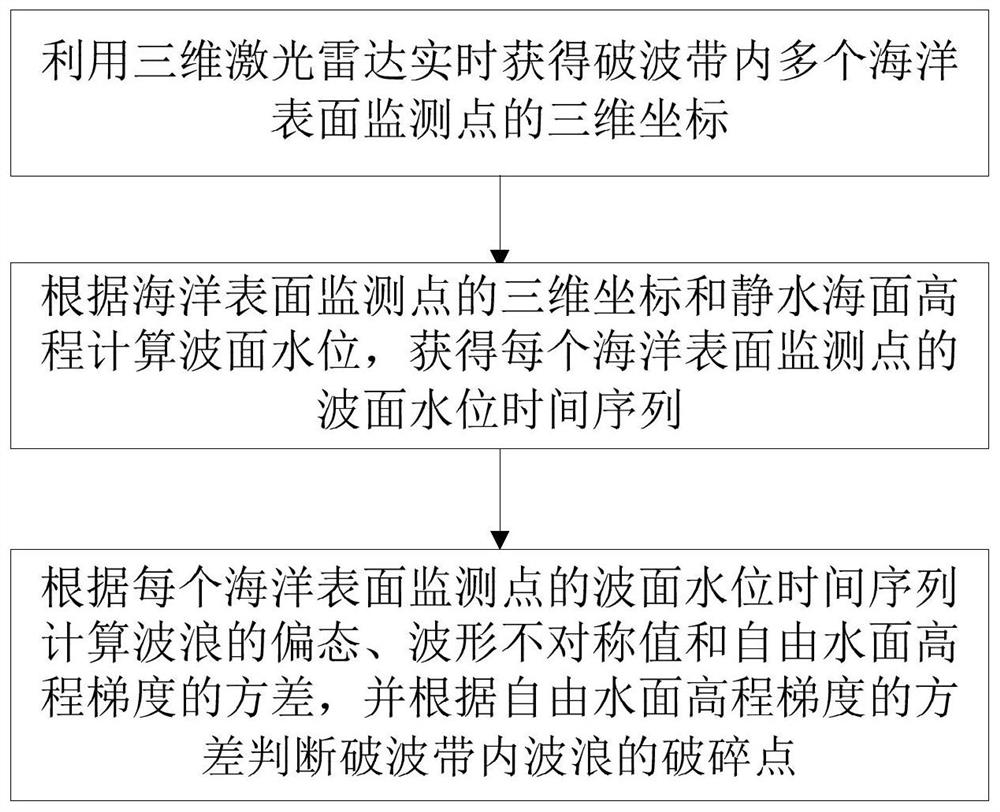
利用三维激光雷达实时获得破波带内多个海洋表面监测点的三维坐标;
根据海洋表面监测点的三维坐标和静水海面高程计算波面水位,获得每个海洋表面监测点的波面水位时间序列;
根据每个海洋表面监测点的波面水位时间序列计算波浪的偏态和、波形不对称值和自由水面高程梯度的方差,并根据自由水面高程梯度的方差判断破波带内波浪的破碎点。
结合第一方面,进一步的,每个海洋表面监测点的三维坐标的获得方法为:
利用三维激光雷达向破波带内海洋表面发射多条不重合的激光,并接收海洋表面反射的激光,每条激光对应一个海洋表面监测点;
根据激光光速和激光反射时间计算当前时刻每个海洋表面监测点到三维激光雷达的相对距离;
根据三维激光雷达的绝对坐标、激光发射角度和每个海洋表面监测点到三维激光雷达的相对距离,计算当前时刻每个海洋表面监测点的三维坐标。
结合第一方面,进一步的,所有海洋表面监测点的三维坐标组成的集合为Q
根据预设的邻近点数量计算每个海洋表面监测点的距离阈值:
其中,
比较
根据滤波后的三维坐标集合中的纵向坐标z和静水海面高程h计算每个海洋表面监测点在每个时刻的波面水位Δh=z-h;
利用不同时刻的波面水位组成每个海洋表面监测点的波面水位时间序列。
结合第一方面,进一步的,根据每个海洋表面监测点的波面水位时间序列计算波浪的偏态和波形不对称值的方法为:
根据每个海洋表面监测点的波面水位时间序列获得每个波浪在每个海洋表面监测点的纵向波形图,所述纵向波形图的横坐标为时间,纵向波形图的纵坐标为海洋表面监测点的纵向坐标z;
根据纵向波形图计算纵向波面峰值和平均水位线;
根据纵向波面峰值和平均水位线计算波浪的偏态,计算公式如下:
其中,A
根据纵向波面峰值和平均水位线计算波形不对称值,计算公式如下:
其中,S
结合第一方面,进一步的,将破波带划分为多个沿着向岸方向的剖面,则波浪在一个剖面上的破碎点的判断方法为:
根据剖面上每个海洋表面监测点的纵向波形图得到其波面水位在[0.8H,H]范围内的G个时间点,并获得G个时间点的横向波形图,所述横向波形图的横坐标为海洋表面监测点的水平向坐标x,横向波形图的纵坐标为海洋表面监测点在当前时间点的纵向坐标z;
根据每个海洋表面监测点的每个时间点的横向波形图,计算该海洋表面监测点与其相邻海洋表面监测点之间的自由水面高程梯度,得到G个自由水面高程梯度;
根据G个自由水面高程梯度计算该海洋表面监测点的方差GVM;
按照由远到近的顺序依次将剖面上每个海洋表面监测点的方差GVM与方差阈值比较,当方差GVM大于方差阈值,则该海洋表面监测点为波浪的破碎点。
第二方面,本发明提出了一种基于三维激光雷达的破波带波浪水动力监测系统,包括:
数据采集模块,用于利用激光雷达实时扫描破波带内的海洋表面,获取破波带内每个海洋表面监测点的三维坐标;
波浪监测模块,用于根据每个海洋表面监测点的三维坐标计算破波带内每个波浪的波形数据,所述波形数据包括波面水位时间序列、波浪的偏态、波形不对称值和波浪的破碎点;
监测显示模块,用于显示波浪监测模块获得的波形数据;
数据存储模块,用于存储破波带内每个海洋表面监测点的三维坐标和破波带内每个波浪的波形数据;
通信模块,用于将数据采集模块采集的三维坐标传输到数据存储模块和波浪监测模块,并将波浪监测模块的波形数据传输到数据存储模块和监测显示模块;
电源模块,用于给数据采集模块、波浪监测模块、监测显示模块、数据存储模块和通信模块供电。
结合第二方面,进一步的,所述数据采集模块包括保护装置、固定装置和三维激光雷达,所述保护装置和三维激光雷达安装在固定装置内部,三维激光雷达与保护装置电连接。
结合第二方面,进一步的,所述三维激光雷达包括激光器、惯性导航子模块和定位子模块;所述保护装置包括防雷子模块和防漏电子模块;所述固定装置包括固定支座和泡沫夹层;三维激光雷达安装在固定支座的中间位置,保护装置安装在三维激光雷达与固定支座的内壁之间,泡沫夹层分别填充在固定支座内壁与保护装置之间、保护装置与三维激光雷达之间。
结合第二方面,进一步的,所述数据存储模块包括保护箱、网络附属存储和散热装置,所述网络附属存储和散热装置安装在保护箱内,所述保护箱的一侧设有散热孔和接线孔,所述接线孔用于给网络附属存储连接网线和电源线。
结合第二方面,进一步的,所述通信模块包括POE交换机和5G路由器,所述POE交换机用于连接其他模块,进行数据传输;所述5G路由器用于作为野外互联网接入设备。
采用以上技术手段后可以获得以下优势:
本发明提出了一种基于三维激光雷达的破波带波浪水动力监测方法及其系统,利用三维激光雷达实时获取破波带内海洋表面的三维坐标,确定海洋表面每个坐标点在每个时刻的高度变化,进而获得破波带内海洋表面的水位变化情况,根据沿着向岸方向的剖面上的水位变化可以计算出波浪的破碎点;此外,本发明还能够根据海洋表面监测点的三维坐标计算波浪的偏态和波形不对称值,了解波浪形态,有利于波浪传播的进一步研究。本发明能够实现自动化的破波带波浪水动力参数监测效果,准确获得波浪的破碎点及波浪形态参数,可实现对拟监测海域波面的长期、高效、高精度、高分辨率二维连续观测。
附图说明
图1为本发明一种基于三维激光雷达的破波带波浪水动力监测方法的步骤流程图;
图2为本发明实施例中三维激光雷达的监测示意图;
图3为本发明实施例中海洋表面监测点的纵向波形图;
图4为本发明一种基于三维激光雷达的破波带波浪水动力监测系统的结构示意图;
图5为本发明实施例中数据采集模块的结构示意图;
图中,1是数据采集模块,2是波浪监测模块,3是监测显示模块,4是数据存储模块,5是通信模块,6是电源模块,101是保护装置,102是三维激光雷达,103是固定支座,104是泡沫夹层。
具体实施方式
下面结合附图对本发明的技术方案作进一步说明:
本发明提出了一种基于三维激光雷达的破波带波浪水动力监测方法,如图1所示,具体包括如下步骤:
步骤A、利用三维激光雷达实时获得破波带内每个海洋表面监测点的三维坐标。
步骤A01、本发明在破波带内设置了多个三维激光雷达,如图2所示,每个三维激光雷达可以监测半径为d的圆域内的海洋表面,利用三维激光雷达向其监测圆域内的海洋表面发射多条激光,并接收海洋表面反射的激光,每一条激光对应一个海洋表面监测点,监测圆域内激光的密度(即海洋表面监测点的数量)可以自行设置。
步骤A02、根据激光光速和激光反射时间计算当前时刻每个海洋表面监测点到三维激光雷达的相对距离l。
激光光速c与气象条件有关,且随当地温度、气压和湿度变化,具体计算公式如下:
其中,c
其中,n
其中,A、B、C为常数,一般情况下,A=2876.04×10
步骤A03、根据三维激光雷达的绝对坐标、激光发射角度(激光与绝对坐标系中x、y、z轴的夹角α、β、γ)和每个海洋表面监测点到三维激光雷达的相对距离l,计算当前时刻每个海洋表面监测点的三维坐标(x,y,z):
在本发明实施例中,绝对坐标系中x轴与海岸线垂直,y轴与海岸线平行,z轴与海洋表面垂直;三维坐标中的水平向坐标(x,y)为海洋表面监测点的地理坐标,三维坐标中的纵向坐标z为海洋表面监测点的高程,即波面水位。
步骤B、根据海洋表面监测点的三维坐标和静水海面高程计算波面水位,获得每个海洋表面监测点的波面水位时间序列。
本发明实施例中,所有海洋表面监测点的三维坐标组成的集合为Q
步骤B01、根据三维激光雷达的监测圆域的大小和海洋表面监测点的数量等设置邻近点数量,邻近点指与某个海洋表面监测点邻近的其他海洋表面监测点;根据邻近点数量计算每个海洋表面监测点的距离阈值:
其中,
步骤B02、针对每一个海洋表面监测点,比较
步骤B03、根据滤波后的三维坐标集合中的纵向坐标z和静水海面高程h计算每个海洋表面监测点在每个时刻的波面水位Δh=z-h。
步骤B04、利用同一个海洋表面监测点在不同时刻的波面水位组成该海洋表面监测点的波面水位时间序列。波面水位时间序列可以表现出海洋表面的水位随时间的变化关系。
本发明可以采用上跨零点法获得波面有效波高、有效周期、增减水、波频谱在三维激光雷达监测范围内的分布等;基于不同时刻的水位分布可以绘制不同时刻的波形图;根据单位时间间隔Δt内波形移动距离Δx可以计算波面流速v=Δx/Δt,由此也可以得到瞬时流速和平均流速在监测范围内的分布和变化。以上数据都可以作为破波带波浪水动力监测结果。
步骤C、根据每个海洋表面监测点的波面水位时间序列计算波浪的偏态和、波形不对称值和自由水面高程梯度的方差,并根据自由水面高程梯度的方差判断破波带内波浪的破碎点。
在步骤C中,为了准确掌握破波带波浪水动力情况,需要根据每个海洋表面监测点的波面水位时间序列绘制对应的波形图,具体操作如下:
步骤C01、根据每个海洋表面监测点的波面水位时间序列获得每个波浪在每个海洋表面监测点的纵向波形图,纵向波形图可以展示出破波带内一个固定的地理坐标点处波面水位随时间的变化情况,如图3所示,纵向波形图的横坐标为时间,纵向波形图的纵坐标为海洋表面监测点的纵向坐标z。
步骤C02、根据纵向波形图计算纵向波面峰值和平均水位线,纵向波面峰值是一段时间内该波浪的波面水位的最大值,平均水位线MWL是一段时间内波面水位的平均值。
本发明方法得到纵向波形图之后,可以根据纵向波面峰值和平均水位线计算波浪的偏态和波形不对称值,具体操作如下:
步骤C03、从一个初始位置开始,在破波带各个位置跟踪波面峰值,根据纵向波面峰值和平均水位线计算波浪的偏态,计算公式如下:
其中,A
步骤C04、根据纵向波面峰值和平均水位线计算波形不对称值,计算公式如下:
其中,S
波浪的偏态和波形不对称值可以表现出波浪的形态,有利于了解波浪的传播变形,是本发明波浪水动力监测结果中监测到的参数。
为了研究波浪的破碎点,本发明将破波带划分为多个沿着向岸方向的剖面,从三维坐标系中看剖面与海岸线垂直,与三维坐标系的x轴平行,根据每个剖面上所有海洋表面监测点的纵向波形图判断波浪破碎点,具体操作如下:
步骤C05、以第i个海洋表面监测点为例,根据第i个海洋表面监测点纵向波形图得到波面水位在[0.8H,H]范围内的G个时间点,并根据G个时间点获得时间点对应的横向波形图,以时间点t
步骤C06、根据每个时间点的横向波形图,计算横向波形图中第i个海洋表面监测点与其前一个、相邻的海洋表面监测点(即在远离海岸线的方向上离第i个海洋表面监测点最近的海洋表面监测点)之间的自由水面高程梯度(ΔH/Δx),得到G个自由水面高程梯度,并计算G个自由水面高程梯度的方差GVM,其中,方差GVM即为第i个海洋表面监测点的方差。
步骤C07、根据剖面上每个海洋表面监测点与海岸线的距离,按照由远到近的顺序依次将剖面上每个海洋表面监测点的方差GVM与预先设置的方差阈值比较,当方差GVM大于方差阈值,则该海洋表面监测点为波浪的破碎点,本发明实施例中,方差阈值取0.2。所有沿着向岸方向的剖面,每个断面上的破碎点可以组成该检测区域的破碎点集,有利于了解波浪在海岸上的破碎情况。
本发明还提出了一种基于三维激光雷达的破波带波浪水动力监测系统,如图4所示,主要包括数据采集模块1、波浪监测模块2、监测显示模块3、数据存储模块4、通信模块5和电源模块6;数据采集模块通过通信模块与波浪监测模块和数据存储模块连接,波浪监测模块又通过通信模块与监测显示模块和数据存储模块连接。一个监测系统可以包括多个数据采集模块。
数据采集模块安装在海洋表面上方,通过考察现场监测海域地形地貌和水动力条件,可以选择波浪变形破碎区域或特殊地形地貌区域作为数据采集模块的安装点,数据采集模块的安装高度不小于当地最大波高。数据采集模块可以利用激光雷达实时、快速、精确的扫描海洋表面,获取破波带内每个海洋表面监测点的三维坐标。如图5所示,数据采集模块包括保护装置101、固定装置和三维激光雷达102,固定装置包括固定支座103和泡沫夹层104,固定支座用于固定三维激光雷达的位置,确定三维激光雷达的监测范围,三维激光雷达安装在固定支座的中间位置,三维激光雷达的纵轴线垂直于水平面,保护装置安装在三维激光雷达与固定支座的内壁之间,固定支座的底部可以连接一根支撑杆,将整个数据采集模块支撑在一定高度上;泡沫夹层分别填充在固定支座内壁与保护装置之间、保护装置与三维激光雷达之间,泡沫夹层可以加强激光雷达的稳定性,减少激光雷达晃动时与周围环境产生的摩擦和碰撞,避免激光雷达的位置发生改变,也避免激光雷达装置受损。
在本发明实施例中,三维激光雷达包括激光器、惯性导航子模块和定位子模块,激光器用于发射和接收激光;惯性导航子模块用于获取激光器发射的激光与水平向x、y坐标轴和垂向z坐标轴的夹角α、β、γ,精准定位激光发射和返回的方向,并根据夹角α、β、γ和激光反射时间计算海洋表面监测点关于激光器的相对位置;定位子模块用于确定激光器所在点的绝对坐标,并根据海洋表面监测点的相对位置计算海洋表面监测点的绝对坐标(三维坐标),得到每个时刻每个绝对坐标处海洋表面的高程z,即每个海洋表面监测点的波面水位。保护装置包括防雷子模块和防漏电子模块,防雷模块用于保护监测系统在雷电等恶劣气象条件下的安全,防漏电模块用于避免监测系统和周围水体携带电流,引起安全隐患,进而确保三维激光雷达在极端气象条件下也能安全工作。
波浪监测模块主要用于根据每个海洋表面监测点的三维坐标计算破波带内每个波浪的波形数据,波形数据包括波面水位时间序列、波浪的偏态、波形不对称和波浪的破碎点。此外,波浪监测模块还可以输入环境变量和激光雷达的工作参数,调试信号采集频率和采集时间。波浪监测模块中波浪数据的计算方法与本发明方法的步骤B、C、D相同。监测显示模块主要用于接收并显示波浪监测模块的波形数据,方便监测人员观察。
在本发明实施例中,数据存储模块包括保护箱、网络附属存储和散热装置,网络附属存储和散热装置安装在保护箱内,保护箱的一侧设有散热孔和接线孔,接线孔用于给网络附属存储连接网线和电源线,保护箱和散热装置可以确保网络附属存储在防水、散热的安全条件下工作。网络附属存储主要用于存储破波带内每个海洋表面监测点的三维坐标和破波带内每个波浪的波形数据;
在本发明实施例中,通信模块包括POE交换机和5G路由器,POE交换机和5G路由器可以组成局域网,实现设备之间的相互通讯;POE交换机用于连接其他模块,进行数据传输,具体的,POE交换机可以将数据采集模块采集的三维坐标传输到数据存储模块和波浪监测模块,并将波浪监测模块的波形数据传输到数据存储模块和监测显示模块;5G路由器用于作为野外互联网接入设备,主要用来连接上位机。
电源模块主要用于给系统内其他模块供电。考虑到海洋监测的特殊性,电源模块可以采用太阳能供电、固定电池供电等供电方式,在条件允许的情况下,电源模块也可以采用电缆供电。
与传统海洋监测技术相比,本发明能够实现自动化的破波带波浪水动力参数监测效果,准确获得波浪的破碎点及波浪形态参数,可实现对拟监测海域波面的长期、高效、高精度、高分辨率二维连续观测。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
- 一种基于三维激光雷达的破波带波浪水动力监测方法及其系统
- 一种基于三维激光雷达的破波带波浪水动力监测方法及其系统