一种液压马达往复回转速度测量用传感器
文献发布时间:2023-06-19 12:10:19
技术领域
本发明属于传感器技术领域,具体涉及一种液压马达往复回转速度测量用传感器。
背景技术
液压马达是液压系统的一种执行元件,它将液压泵提供的液体压力能转变为其输出轴的机械能(转矩和转速)。液压马达齿轮是正反往复回转方式,对最低稳定转速有一定的要求。
目前转速测量多采用闸门法,即对传感器脉冲输出进行定时计数,这种方法仅适合于高速多齿单方向转盘的转速测量,而针对液压马达这种特殊的低速单齿往复回转的转速测量,一直没有好的方法,经常是响应时间长,精度误差大,数据跳字严重等。
鉴于此,有必要提出一种设计合理且可以有效改善上述问题的液压马达往复回转速度测量用传感器。
发明内容
本发明旨在至少解决现有技术中存在的技术问题之一,提供一种液压马达往复回转速度测量用传感器。
本发明提供一种液压马达往复回转速度测量用传感器包括:探杆壳体、霍尔齿轮芯片和调理电路板,所述霍尔齿轮芯片和所述调理电路板设置在所述探杆壳体内,所述调理电路板上设置有锁相环电路、脉冲捕获电路、信号输出电路;所述霍尔齿轮芯片包括背磁片以及至少一个霍尔元件,所述背磁片用于将所述液压马达的齿轮运动信号转换为磁场变化信号,并由所述霍尔元件将所述磁场变化信号进行处理后输出方波频率信号;所述锁相环电路与所述霍尔齿轮芯片电连接,用于对所述方波频率信号进行倍频处理;所述脉冲捕获电路与所述锁相环电路电连接,用于对倍频处理后的方波频率信号进行脉冲捕获,获得脉冲时间信号;所述信号输出电路与所述脉冲捕获电路电连接,用于将所述脉冲时间信号转换为电压信号并输出。
可选的,所述霍尔齿轮芯片采用集成背磁触发。
可选的,所述霍尔齿轮芯片的回差为-60Gs~+60Gs。
可选的,所述霍尔齿轮芯片包括三个霍尔元件,所述三个霍尔元件并联电连接形成两个独立的差分通道;所述锁相环电路包括第一输入端和第二输入端,所述第一输入端与其中一个所述差分通道电连接,所述第二输入端与另外一个所述差分通道电连接。
可选的,所述脉冲捕获电路包括捕获模块和定时模块;所述捕获模块与所述锁相环电路电连接,用于在所述方波频率信号符合预先设定的捕获条件时产生中断,并记录当时的脉冲值;所述定时模块与所述捕获模块电连接,用于记录产生脉冲值的脉冲时间,获得所述脉冲时间信号。
可选的,所述信号输出电路包括数模转换电路和低通滤波电路;所述数模转换电路与所述脉冲捕获电路电连接,用于将数字量的所述脉冲时间信号转换为模拟量的电压信号;所述低通滤波电路与所述数模转换电路电连接,用于对所述模拟量的电压信号进行低通滤波处理并输出。
可选的,所述探杆壳体的探杆与所述液压马达的齿盘之间的距离范围为0mm~3mm。
可选的,所述调理电路板上还设置有电源电路和反接保护电路;所述反接保护电路的输入端与所述电源电路电连接,所述反接保护电路的输出端分别与所述锁相环电路、脉冲捕获电路、信号输出电路电连接。
可选的,所述传感器还包括支架,所述支架用于将所述霍尔齿轮芯片固定在所述探杆壳体的探头固定位置处。
可选的,所述探杆壳体采用不锈钢一体式密封结构。
本发明的液压马达往复回转速度测量用传感器,包括探杆壳体、霍尔齿轮芯片和调理电路板,霍尔齿轮芯片和调理电路板设置在所述探杆壳体内,调理电路板上设置有锁相环电路、脉冲捕获电路、信号输出电路;霍尔齿轮芯片的背磁片通过将液压马达的齿轮运动信号转换为磁场变化信号,并由霍尔元件将磁场变化信号进行处理后输出方波频率信号;锁相环电路对方波频率信号进行倍频处理;脉冲捕获电路对倍频处理后的方波频率信号进行脉冲捕获,获得脉冲时间信号;信号输出电路对脉冲时间信号转换为电压信号并输出,通过输出的电压变化就可以监测液压马达往复回转速度的变化。本发明实现了对低速单齿往复回转的液压马达转速的测量,响应时间短,精度误差小,实时监测液压马达往复回转速度,有效判断液压马达是否处于良好的工作状态。
附图说明
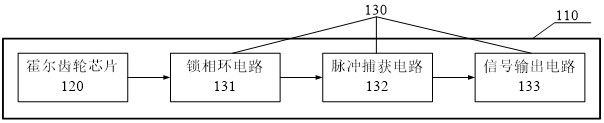
图1为本发明一实施例中液压马达往复回转速度测量用传感器的设计方法组成示意框图;
图2为本发明另一实施例中液压马达往复回转速度测量用传感器锁相环电路原理示意图;
图3为本发明另一实施例中液压马达往复回转速度测量用传感器脉冲捕获电路流程示意图;
图4为本发明另一实施例中液压马达往复回转速度测量用传感器信号输出电路示意图。
具体实施方式
为使本领域技术人员更好地理解本发明的技术方案,下面结合附图和具体实施方式对本发明进一步详细描述。
如图1所示,本发明提供一种液压马达往复回转速度测量用传感器,所述传感器包括:探杆壳体110、霍尔齿轮芯片120和调理电路板130,霍尔齿轮芯片120和调理电路板130设置在所述探杆壳体110内,调理电路板130上设置有锁相环电路131、脉冲捕获电路132、信号输出电路133。霍尔齿轮芯片120包括背磁片(图中未示出)以及至少一个霍尔元件(图中未示出),背磁片用于将所述液压马达的齿轮运动信号转换为磁场变化信号,并由霍尔元件将磁场变化信号进行处理后输出方波频率信号;锁相环电路131与霍尔齿轮芯片120电连接,用于对方波频率信号进行倍频处理;脉冲捕获电路132与锁相环电路131电连接,用于对倍频处理后的方波频率信号进行脉冲捕获,获得脉冲时间信号;信号输出电路133与脉冲捕获电路132电连接,用于将脉冲时间信号转换为电压信号并输出。
具体地,当液压马达的齿轮低速往复回转运动时,霍尔齿轮芯片120的背磁片将液压马达的齿轮运动信号转化为磁场变化信号,并由霍尔元件对磁场变化信号进行处理输出方波频率信号;锁相环电路131接收到霍尔齿轮芯片120输出的方波频率信号后进行倍频处理;脉冲捕获电路132对倍频处理后的方波频率信号进行脉冲捕获,获得脉冲时间信号;信号输出电路133接收到脉冲时间信号,进而将脉冲时间信号转换为电压信号并输出,通过输出的电压变化就可以监测液压马达往复回转速度的变化。
本发明实施例的液压马达往复回转速度测量用传感器,包括探杆壳体、霍尔齿轮芯片和调理电路板,霍尔齿轮芯片和调理电路板设置在探杆壳体内,调理电路板上设置有锁相环电路、脉冲捕获电路、信号输出电路;霍尔齿轮芯片的背磁片通过将液压马达的齿轮运动信号转换为磁场变化信号,并由霍尔元件将磁场变化信号进行处理后输出方波频率信号;锁相环电路对方波频率信号进行倍频处理;脉冲捕获电路对倍频处理后的方波频率信号进行脉冲捕获,获得脉冲时间信号;信号输出电路对脉冲时间信号转换为电压信号并输出,通过输出的电压变化就可以监测液压马达往复回转速度的变化。本发明实现了对低速单齿往复回转的液压马达转速的测量,响应时间短,精度误差小,实时监测液压马达往复回转速度,有效判断液压马达是否处于良好的工作状态。
本实施例中霍尔齿轮芯片120采用集成背磁触发,回差为-60Gs~+60Gs。由于芯片采用了先进的校准技术以优化信号偏移和幅度,所以感应精度极高,可不随温度变化,容易保持一致性能和提高可靠性。
霍尔齿轮芯片120包括三个霍尔元件,三个霍尔元件并联电连接形成两个独立的差分通道,差分通道产生霍尔差分信号,进而产生高精度的整形脉冲输出。
需要说明的是,锁相环电路131包括第一输入端和第二输入端,第一输入端与其中一个上述差分通道电连接,第二输入端与上述另外一个所述差分通道电连接。方波频率通过差分通道进入锁相环电路131。
如图2所示,本实施例中锁相环电路131包括鉴相器140、环路滤波器150、VCO(压控振荡器)160及可编程分频器1/N170。当没有参考输入信号时,环路滤波器150的输出为零(或为某一固定值)。这时,VCO 160按其固有频率进行自由振荡并输出
需要说明的是,在本实施例中,由于在VCO(压控振荡器)160之后加一个可编程分频器1/N170,再反馈回锁相环输入端,此时输出信号为原来的输入信号的N倍,即
如图3所示,本实施例中采用单片机对锁相环倍频处理后的方波频率信号进行脉冲捕获,单片机具有高集成度,只需少量外围电路,内核与普通51系列兼容。脉冲捕获电路132包括捕获模块(图中未示出)和定时模块(图中未示出),捕获模块为单片机自身配置的CCP(捕获/比较/脉宽调制)模块,定时模块为单片机自身配置的定时器,单片机的CCP模块与定时器配合使用。捕获方式是检测引脚上输入信号的状态,本实施例中信号输入状态设定为信号上升沿,当输入信号的状态符合设定的条件时即为上升沿时,产生中断,定时器停止工作,记录当时的脉冲值,并读出定时器的数值,获得所述脉冲时间信号。将获得的脉冲时间信号采用数字迭代算法测试值做滤波,使得实时测量精度≥0.5%,响应时间≤0.5s。当然,也可以用其他的电路作为脉冲捕获电路132,本实施例不做具体限定,只要可以对锁相环倍频处理后的方波频率信号进行脉冲捕获即可。
如图4所示,信号输出电路133包括数模转换电路和低通滤波电路。本实施例中,数模转换电路采用DA信号输出电路DAC,该电路采用MSOP 封装的16位轨至轨DAC芯片,工作电源范围宽,功耗电流低至300µA,在断电模式下单个信道的消耗电流降至 1µA,高轨至轨输出驱动电流 (±15mA),内置高性能输出缓冲器,将数字量的所述脉冲时间信号转换为模拟量的电压信号。
进一步地,DA信号输出电路DAC外置有低通滤波电路LPF,本实施例中低通滤波电路,包括分压单元、电容和运算放大器,分压单元的一端与运算放大器的同向输入端连接,分压单元的另一端与DA输出电路DAC的输出端连接,运算放大器的反向输入端与所述电容连接。该低通滤波电路,可以抑制不需要的杂散信号,使测量系统的信噪比增加,电压信号0.5V~4.5V比例输出并被保证具有单调特性。液压马达不同的往复回转速度会对应不同的电压输出,根据电压大小及方向的变化可以监测液压马达往复回转速度及方向。
另外,调理电路板上还设置有电源电路(图中未示出)和反接保护电路(图中未示出);反接保护电路的输入端与所述电源电路电连接,所述反接保护电路的输出端分别与所述锁相环电路131、脉冲捕获电路132、信号输出电路133电连接。液压马达应用中周边环境非常复杂,电磁环境十分恶劣,由于各种开关过程、启动过程或者瞬态变化的负载电流产生脉动过电压,会通过导线或线间电容加到内部电路中,为使测量装置能长期连续、可靠而稳定运行,首先在电源电路进行滤波稳压处理,保证测量装置工作电压的稳定;为了防止异常电源的输入,在电源电路上接入反接保护电路,能抗高电源浪涌电压,有效提高测量装置的抗干扰能力。
本实施例中,探杆壳体110的探杆与液压马达的齿盘之间的距离范围为0mm~3mm,将霍尔齿轮芯片120用尼龙PA66材质支架置于探头固定位置,与液压马达往复运动的单齿接近,可以更精确的感应液压马达齿轮的运动。
探杆壳体110采用不锈钢一体式密封结构,具体通过内六角圆柱头螺钉机械连接,导线固定接头将四芯屏蔽线缆、密封环、垫圈和压紧螺母依次安装并固定,将探杆壳体110内灌胶密封后,最后用激光完成端盖与探杆壳体110焊接,形成一体产品,防护等级达IP68。传感器采用一体式密封结构,电路和结构设计简单可靠,产品易于批量生产。
可以理解的是,以上实施方式仅仅是为了说明本发明的原理而采用的示例性实施方式,然而本发明并不局限于此。对于本领域内的普通技术人员而言,在不脱离本发明的精神和实质的情况下,可以做出各种变型和改进,这些变型和改进也视为本发明的保护范围。
- 一种液压马达往复回转速度测量用传感器
- 一种基于液压马达与扭矩传感器的测量装置