一种收发分离的激光雷达系统
文献发布时间:2023-06-19 13:46:35
技术领域
本公开涉及激光雷达技术领域,尤其涉及一种收发分离的激光雷达系统。
背景技术
三维环境测量和感知具有重要的民用和军事应用价值。在ADAS辅助驾驶和自动驾驶系统中,对车辆周边环境进行空间距离测量和三维环境重建,是实现高精度自动驾驶控制的前提条件。毫米波雷达和摄像头三维视觉重建是比较常见的距离测量技术,但在自动驾驶应用场景下,毫米波雷达的横向分辨率难以达到要求,且易受金属物体干扰;摄像头三维视觉重建的测距精度较低,对于远距离的目标,也较难实现精准的距离测量。激光雷达通过主动发射脉冲式红外激光束,照射到被测物体后,形成漫反射回波,由接收系统收集;通过测量发射脉冲和接收回波之间的时间差,可以获得被测物体的距离信息。激光雷达具有测距精度高、横向分辨率高的优点,在辅助驾驶和自动驾驶领域有广阔的应用前景。
随着自动驾驶的发展,对雷达在竖直方向上的尺寸要求越来越严苛,如何降低激光雷达在竖直方向上的尺寸,使激光雷达与行驶设备在外观上更好的融合成了当前迫切的需求。
发明内容
有鉴于此,本公开提出了一种收发分离的激光雷达系统。
根据本公开的一方面,提供了一种收发分离的激光雷达系统,所述激光雷达系统设置于行驶设备,包括:
激光发射部件,用于发射激光束至不同的探测区域,探测所述探测区域内的物体;
光接收部件,用于接收激光束在被探测物体表面产生的漫反射回波;
控制器,用于连接所述激光发射部件和所述光接收部件,控制所述激光发射部件发射激光束和所述光接收部件接收漫反射回波;
其中,所述激光发射部件和所述光接收部件分开放置于所述行驶设备的不同位置,所述激光发射部件和所述光接收部件在竖直方向上呈预设距离设置。
对于上述系统,在一种可能的实现方式中,所述激光发射部件包括:
一个或多个激光发射器,用于发射激光束;
反射镜,所述反射镜围绕旋转轴进行360度竖直旋转,用于对所述激光发射器发射的激光束进行反射,形成反射激光束进入所述探测区域进行物体探测。
对于上述系统,在一种可能的实现方式中,所述激光发射部件包括多个激光发射器,
所述多个激光发射器,在所述激光雷达系统的系统光轴水平方向的两侧对称分布,所述光接收部件位于所述系统光轴上。
对于上述系统,在一种可能的实现方式中,所述激光发射部件还包括准直模块,
所述准直模块位于所述激光发射器和所述反射镜之间的光路上,用于压缩所述激光发射器发射的激光束的发散角,形成线光束。
对于上述系统,在一种可能的实现方式中,所述激光雷达系统还包括光学平板,
所述光学平板位于所述激光发射部件和所述被探测物体之间、所述被探测物体和所述光接收部件之间的光路上,所述光学平板的单面或双面涂有增透膜,用于选择探测物体的激光束的波段。
对于上述系统,在一种可能的实现方式中,所述光接收部件位于所述光学平板反射的杂散光的出射范围之外。
对于上述系统,在一种可能的实现方式中,所述光接收部件为线阵APD探测器。
对于上述系统,在一种可能的实现方式中,所述线阵APD探测器在垂直阵列方向的宽度为1-2mm。
对于上述系统,在一种可能的实现方式中,所述线阵APD探测器的阵列方向与所述激光束方向平行。
对于上述系统,在一种可能的实现方式中,所述激光发射部件位于行驶设备的车灯位置,所述光接收部件位于行驶设备的前挡风玻璃顶部位置,所述控制器位于行驶设备的车前盖下方。
根据本公开实施例的收发分离的激光雷达系统,其中,激光发射部件和光接收部件的分离放置,一方面,由于激光发射部件和光接收部件在竖直方向上呈预设距离设置,减小了激光雷达系统在竖直方向的尺寸,便于激光雷达系统的安装;另一方面,由于激光发射部件和光接收部件是完全分离的两个部件,可以单独对激光发射部件和光接收部件进行优化,而无需考虑激光雷达系统的体积;同时,由于激光发射部件和光接收部件距离较远,激光发射部件发射激光产生的杂散光难以进入光接收部件,降低了出射激光产生的杂散光对光接收部件的影响,有效避免杂散光产生的噪声影响。
根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将变得清楚。
附图说明
包含在说明书中并且构成说明书的一部分的附图与说明书一起示出了本公开的示例性实施例、特征和方面,并且用于解释本公开的原理。
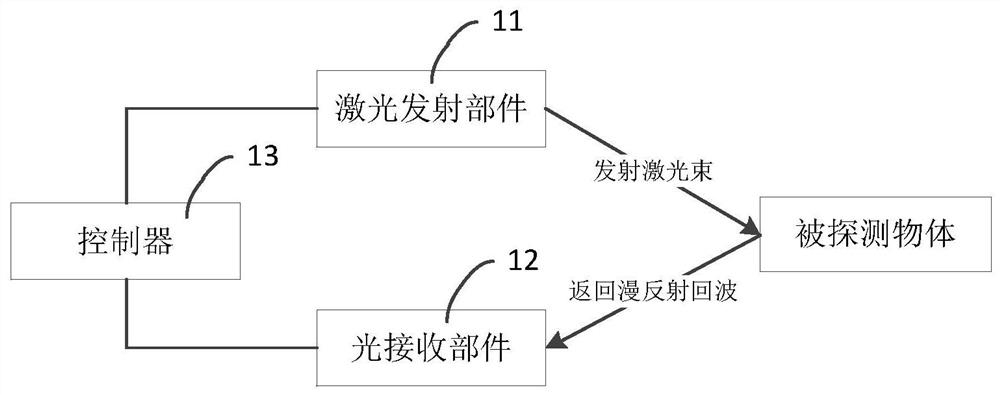
图1示出根据本公开一实施例的收发分离的激光雷达系统的结构示意图。
图2示出根据本公开一实施例的收发分离的激光雷达系统的激光发射部件示意图。
图3示出根据本公开一实施例的收发分离的激光雷达系统的转镜示意图。
图4示出根据本公开一实施例的收发分离的激光雷达系统的探测视场角度的俯视图。
图5示出根据本公开一实施例的收发堆叠的激光雷达系统的光学平板产生杂散光的示意图。
图6示出根据本公开一实施例的收发分离的激光雷达系统的线阵APD探测器的示意图。
图7示出根据本公开一实施例的收发分离的激光雷达系统的各部件的位置示意图。
具体实施方式
以下将参考附图详细说明本公开的各种示例性实施例、特征和方面。附图中相同的附图标记表示功能相同或相似的元件。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。
另外,为了更好的说明本公开,在下文的具体实施方式中给出了众多的具体细节。本领域技术人员应当理解,没有某些具体细节,本公开同样可以实施。在一些实例中,对于本领域技术人员熟知的方法、手段、元件和电路未作详细描述,以便于凸显本公开的主旨。
图1示出根据本公开一实施例的收发分离的激光雷达系统的结构示意图。该激光雷达系统设置于行驶设备,如图1所示,该系统包括激光发射部件11、光接收部件12和控制器13。
激光发射部件11,用于发射激光束至不同的探测区域,探测所述探测区域内的物体;光接收部件12,用于接收激光束在被探测物体表面产生的漫反射回波;控制器13,用于连接激光发射部件11和光接收部件12,控制激光发射部件11发射激光束和光接收部件12接收漫反射回波;其中,激光发射部件11和光接收部件12分开放置于该行驶设备的不同位置,激光发射部件11和光接收部件12在竖直方向上呈预设距离设置。
目前,随着激光雷达竖直视场角的增大,激光器的出光角度逐渐增大,在相同光程情况下,激光雷达竖直方向上的尺寸会随之增加。若激光器的发散角度小于雷达的竖直视场角,还要对激光器的发散角度进行扩束处理,这会进一步增加激光雷达在竖直方向上的尺寸。随着自动驾驶的发展,对激光雷达在竖直方向上的尺寸要求越来越严苛,如何降低激光雷达在竖直方向上的尺寸成了迫切的需求。
在本实施例中,该激光雷达系统中激光发射部件11和光接收部件12在竖直方向上呈预设距离设置,由于激光发射部件11和光接收部件12两个部件在竖直方向的尺寸都远小于传统的收发堆叠的激光雷达系统在竖直方向的尺寸,这极大方便了激光雷达系统的安装,使激光雷达系统与行驶设备能更好的融合,不易突出安装表面,美化了行驶设备的外观,使用户的使用体验更好。同时,由于激光发射部件11和光接收部件12是完全分离的两个部件,可以对激光发射部件11和光接收部件12分别进行优化,无需考虑激光雷达系统本身体积的大小。
在一种可能的实现方式中,激光发射部件11包括:一个或多个激光发射器,用于发射激光束;反射镜,围绕旋转轴进行360度竖直旋转,用于对激光发射器发射的激光束进行反射,形成反射激光束进入探测区域内进行物体探测。如图2所示,发射的激光束入射到反射镜上,反射镜绕着旋转轴进行360度旋转,用于对激光发射器发射的激光束进行反射,形成反射激光束进入所述探测区域进行物体探测。反射镜可选用双面镜,三面镜,四面镜等,如图3所示。基于MEMS微扫描镜的混合固态扫描技术,在激光雷达的应用中受到广泛关注,然而MEMS镜的尺寸的限制了其使用范围。本发明的收发分离放置的激光雷达系统优化降低反射镜的尺寸,从而可以选用单轴MEMS镜作为反射镜,使实现激光雷达的小型化、低成本化和低功耗化成为可能。
在一种可能的实现方式中,激光发射部件11包括多个激光发射器111,多个激光发射器111在所述系统光轴水平方向的两侧对称分布,所述光接收部件12位于所述系统光轴上。
图4为本公开实施例提供的一种探测视场的俯视图的示意图,在该示意图中,激光发射器的数量为两个,每个发射系统覆盖的角度为θ,通过两个激光发射器111,光接收部件12可以探测2θ-α的水平视场角。两个激光发射器111在系统光轴两侧对称设置,使激光雷达的探测区域左右对称,同时两个激光发射器111所发射的激光重叠的阴影区域角度为α,可以通过精密的时间控制实现光强的叠加,从而提高中间部分的探测距离。通过调节重叠区域角度α和每个激光发射器111覆盖角度θ来调整水平探测视场角,例:每个激光发射器111覆盖65°,重叠区域角度10°,则水平视场角为120°。
在一种可能的实现方式中,激光发射部件11还包括准直模块,该准直模块位于激光发射器111和反射镜之间的光路上,用于压缩激光发射部件11发射的激光束的发散角,形成线光束,设置准直模块能够使激光发射部件11发出的激光有良好的准直特性,线光束宽度较小,最大限度的集中激光的能量,提高分辨率。
在探测远距离物体时,激光雷达系统需要进行高功率发射,但是收到的回波信号却相对微弱,这就对本地噪声的抑制提出了严苛的要求。在一种可能的实现方式中,激光雷达系统还包括光学平板,该光学平板位于激光发射器111和反射镜之间、被探测物体和光接收部件12之间的光路上,光学平板的单面或双面涂有增透膜,用于选择探测物体的激光束的波段,减少不需要波段的激光产生的噪声影响。
在一种可能的实现方式中,光接收部件12位于光学平板反射的杂散光的出射范围之外,能有效避免激光发射部件11的产生的杂散光进入光接收部件12,充分降低杂散光产生的噪声影响。
如图5所示,非收发分离的激光雷达系统在使用过程中,激光发射部件11发射的激光束经过光学平板的前后表面反射后会进入到接收系统中,从而引入的大量本地噪声,造成盲区大,点云中有杂点等系统问题。而本实施例中,激光发射部件11和光接收部件12分离单独放置,激光发射部件11和光接收部件12分离的距离可以是使得杂散光无法进入光接收部件12的距离,该剧了依据不同的行驶设备尺寸有所不太,例如可以是水平方向距离大于等于20cm,竖直方向距离大于等于20cm,该距离远远大于激光发射部件11发射的激光束进入光学平板产生的杂散光的出射范围,可以有效避免光学平板产生的杂散光进入光接收部件12,有效避免了光学平板所带来的杂散光影响。
激光雷达相关技术路线中,收发系统多是单点光源对应单点探测器、单点光源对应面阵探测器或者多点光源对应面阵探测器,其问题在于成本高昂,装调困难,难以实现量产目标。在一种可能的实现方式中,如图6所示,光接收部件12采用线阵APD探测器,其阵列方向与线光束方向平行。使用线阵探测器作为接收器件,激光发射系统产生线状激光光斑与接收视场匹配,可以快速获得多个距离测量点,提高系统的测量速度和适用范围。此外,由于使用单个光束与阵列器件进行匹配,系统的装调难度大大减小,有利于控制激光雷达产品的整体成本。
在一种可能的实现方式中,线阵APD探测器在宽度方向(垂直阵列方向)约1-2mm,通过光接收部件12的接收镜头的设计,使漫反射回波在光接收部件12所在平面的成像宽度小于或等于线阵APD探测器的宽度,即让水平方向更大视场角的光进入线阵APD探测器。
在一种可能的实现方式中,线阵APD探测器的阵列方向与所述激光束方向平行,以便探测视场的范围内的任一点所发出的反射光,都能够被线阵APD探测器探测到。
应用示例:
以下结合“收发分离的激光雷达系统进行目标物扫描”作为一个示例性应用场景,给出根据本公开实施例的应用示例,以便于理解收发分离的激光雷达系统的工作原理及过程。本领域技术人员应理解,以下应用示例仅仅是出于便于理解本公开实施例的目的,不应视为对本公开实施例的限制。
图7示出根据本公开一实施例的收发分离的激光雷达系统的结构示意图。如图7所示,该装置设置于汽车上,包括激光发射部件11、光接收部件12、控制器13和数据传输线14。
激光发射部件11放置在车灯位置处,用于发射激光束至不同的探测区域,探测探测区域内的物体;光接收部件12放置在前挡风玻璃顶部位置,用于接收激光束在被探测物体表面产生的漫反射回波;控制器13放置在车前盖下面的位置,用于连接激光发射部件11和光接收部件12,从而控制激光发射部件11发射激光束和控制光接收部件12接收漫反射回波;激光发射部件11和控制器13之间、光接收部件12与控制器13之间分别通过数据传输线14连接。如图7所示,该汽车上装载的激光雷达系统,其光接收部件12和激光发射部件11分别位于汽车的不同位置,一方面,减小了激光雷达系统在竖直方向上的尺寸,方便了激光雷达系统的安装,美化了汽车的外观;另一方面,可以单独对激光发射部件11和光接收部件12进行优化,无需考虑激光雷达系统的体积;同时,由于激光发射部件11和光接收部件12分离放置,降低了激光发射部件11的出射激光产生的杂散光对光接收部件12的影响,有效避免杂散光产生的噪声影响。
以上已经描述了本公开的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。
- 一种收发分离的激光雷达系统
- 一种收发同步激光雷达光学系统