基于神经导航空间配准导板的空间配准方法
文献发布时间:2023-06-19 19:38:38
技术领域
本发明涉及一种基于神经导航空间配准导板的空间配准方法,属于诊断与治疗的技术领域。
背景技术
空间配准是用图像来对手术操作进行定位和引导的前提。空间配准误差是神经导航临床应用中误差的首要来源,而空间配准不精确导致导航定位的不准确将会造成手术失败,影响病人的生命安全。如何实现精确、稳定和方便的空间配准一直是神经导航领域最关键、最重要的核心问题。
目前的神经导航系统一般使用基于点匹配的空间配准方法进行空间配准。点匹配空间配准利用旋转和平移使两个空间中的一组两两对应的标记点达到空间位置上的一致性。神经导航系统普遍使用基于人工标记物的点匹配方法进行空间配准。临床上通常使用可以在CT或MRI中清晰成像的标记物作为人工标记物,这些人工标记物需要被粘贴在皮肤不易偏移的地方。术前医生在病人头部粘贴6-8个标记物,然后进行影像扫描。配准时医生使用探针在病人空间获取这些标记物的坐标,并在图像空间手动选取相应标记物的坐标,对这些一一对应的坐标采用距离最小准则进行匹配,计算两个空间的坐标变换关系,从而完成病人空间到图像空间的配准。基于人工标记物的点匹配方法精度较高,操作简单,但是它存在以下缺点:(1) 手术前需要在病人头部粘贴标记物,然后进行影像扫描。这就需要在术前专门为导航再做一次影像扫描,加重了病人的经济负担,还使一些急救手术无法进行。如果扫描的是CT图像,则又增加了病人受辐射的程度。(2) 粘贴在皮肤上的标记物由于受皮肤偏移或膨胀的影响,容易发生位移甚至脱落,从而引起较大的配准误差,甚至使导航无法进行。(3) 医生需要反复微调配准过程中获取的坐标,消耗时间较长,增加了手术时间和医生的工作量。
为了克服基于人工标记物的点匹配方法的缺点,人们提出了基于解剖标记点的点匹配方法。通常将人体表面和导航图像上都容易被识别的解剖特征作为解剖标记点。基于解剖标记点的配准方法不需要专门为导航再做一次影像扫描,不需要使用人工标物,但是在图像空间和病人空间中很难精确确定解剖标记点的具体位置,从而造成点对的不一致,所以它的缺点是配准精度不高,临床上很少使用。还有一种基于骨头可植入标记物(钛钉)的点匹配方法,能提供很高的配准精度。这种方法需要在局部麻醉的情况下,将一些钛钉植入头骨。植入头骨的钛钉不受皮肤偏移的影响,也不会从头上脱落,因此配准精度很高,但这种方法对患者有一定的损伤,临床上尽量避免使用这种方法。
发明内容
本发明目的在于提供一种基于神经导航空间配准导板的空间配准方法,不需要粘贴人工标记物进行配准,也不需要专门为导航再做一次影像扫描,导板可重复使用,提高配准精度和患者的使用舒适度,特别适合非麻醉状态下需要重复治疗的神经导航引导的脑部药物递送和神经调控。
本发明的上述技术目的主要是通过以下技术方案解决的: 一种基于神经导航空间配准导板的空间配准方法,包括以下步骤:
S1、对患者头部进行CT或MRI影像学扫描获得患者颅面部三维数据,扫描范围包括颅顶至鼻尖水平;
S2、依据步骤S1获得的三维数据通过计算机建模软件设计患者颅面部3D模型及虚拟导板;
S3、根据颅面部3D模型在虚拟导板上设计至少三个虚拟配准点, 通过3D打印机打印实体导板;
S4、将患者颅面部3D模型及虚拟导板导入神经导航软件, 对患者头部进行固定,将打印好的实体导板紧贴患者面部;
S5、将参考架放置在患者头部边上,光学定位仪放置在能探测到参考架的位置上;
S6、在神经导航软件操作界面上逐个点击虚拟导板的虚拟配准点,操作界面列表显示各个虚拟配准点的空间坐标;
S7、按照步骤S6列表显示的虚拟配准点的顺序,通过探针点击实体导板上对应的实体配准点,完成实体导板上所有配准点与虚拟导板上的所有配准点的一一对应。光学定位仪实时跟踪参考架和探针,获得实体配准点的空间坐标并同步到神经导航软件;
S8、完成患者头部所代表的实体空间与神经导航软件中患者3D模型空间的配准。
上述方法使用配准导板代替人工标记物,简化了术前准备流程,使患者避免为导航再次进行影像扫描,同时提高了配准精度,方便了导航手术操作,保证了手术可靠性。
作为优选,所述步骤S1中对患者头部进行影像扫描后,将DICOM医学影像文件格式的影像数据导入建模软件中,重建为患者颅面部虚拟3D模型;使得患者颅面部的精准数据准确重建,方便后续的手术操作。
作为优选,所述步骤S2中根据患者颅面部3D模型设计虚拟导板,可使虚拟导板紧密贴合在患者颅面部3D模型的面部;上述虚拟导板与患者颅面部3D模型紧密贴合,能使打印出来的实体导板紧密贴合在患者面部,使导板的位置在3D模型和患者面部保持一致。
作为优选,所述步骤S3中的虚拟导板上设计有五个虚拟配准点;上述虚拟导板上设计五个虚拟配准点,可增加对实体导板的配准效果,提高配准精度。
作为优选,所述步骤S5中光学定位仪放置在能探测到参考架的位置上;上述光学定位仪放置在能探测到参考架的位置上,以便于获取实体导板上配准点的空间坐标。
作为优选,所述S5中的参考架上设有四个呈十字形结构分布于端部的反光球,所述反光球朝向光学定位仪;上述参考架设置反光球,使得光学定位仪可通过参考架上的反光球来确定患者颅面部和实体导板的空间坐标。
作为优选,所述步骤S7中实体导板上的实体配准点的空间坐标通过探针针尖对实体导板上的实体配准点的点击获取;上述实体导板上的配准点的空间坐标可通过光学定位仪实时跟踪参考架和探针来获取,定位更加方便。
作为优选,所述步骤S7中的探针上设有四个呈Y形结构分布于端部的反光球,所述反光球朝向光学定位仪;上述探针设计多个不在同一直线上的反光球,方便光学定位仪获得探针的空间坐标。
作为优选,所述步骤S7中实体导板上的各个实体配准点的空间坐标获取后,神经导航软件自动将实体配准点的空间坐标与虚拟配准点的空间坐标进行配准;上述实体配准点和虚拟配准点均通过神经导航软件自动进行配准,配准速度更快,且精准度更高。
因此,本发明简化术前准备流程,使患者避免为导航再次进行影像扫描,配准导板制作简单,配准精度高,患者使用舒适度高, 特别适合非麻醉状态下需要重复治疗的神经导航引导的脑部药物递送和神经调控。
附图说明
图1是本方法的工作流程图;
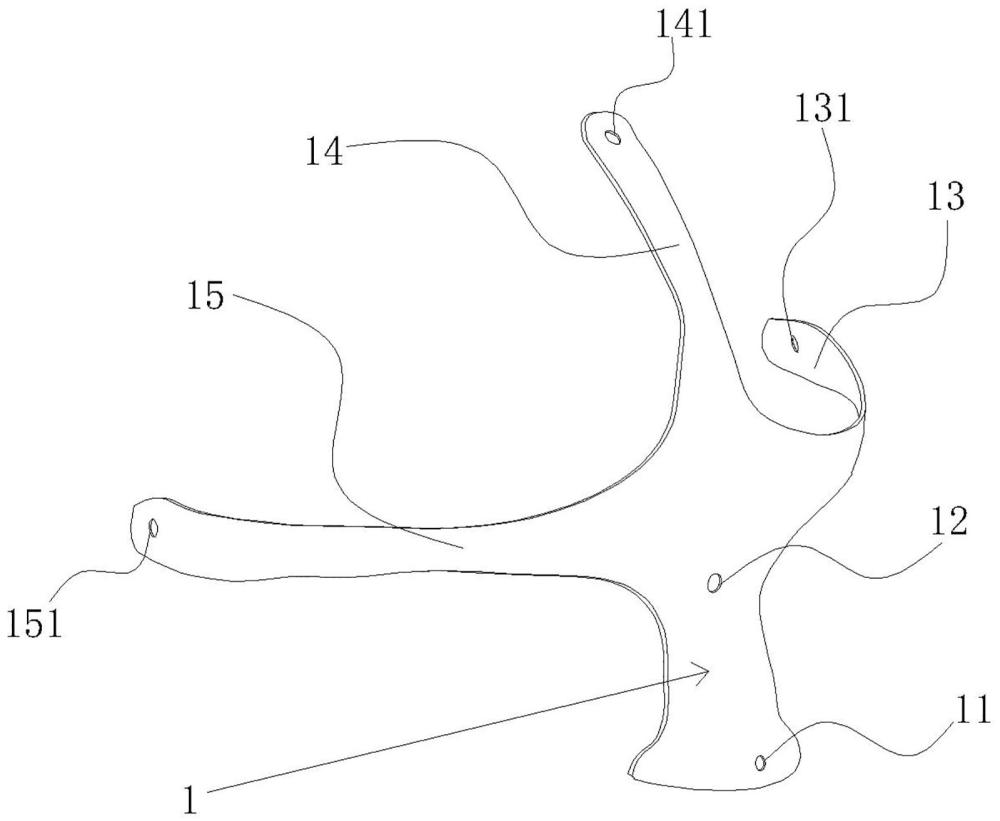
图2是本方法中的神经导航空间配准导板的立体结构图。
具体实施方式
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
如图1所示,一种基于神经导航空间配准导板的空间配准方法,包括以下步骤:
S1、对患者头部进行CT或MRI影像扫描获得患者颅面部三维数据,扫描范围包括颅顶至鼻尖水平;
S2、依据步骤S1获得的三维数据通过计算机建模软件设计患者颅面部3D模型及虚拟导板;
S3、根据颅面部3D模型在虚拟导板上设计至少三个虚拟配准点, 通过3D打印机打印实体导板;
S4、将患者颅面部3D模型及虚拟导板导入神经导航软件, 对患者头部进行固定,将打印好的实体导板紧贴患者面部;
S5、参考架放置在患者头部边上,光学定位仪放置在能探测到参考架的位置上;
S6、在神经导航软件操作界面逐个点击虚拟导板的虚拟配准点,操作界面列表显示各个虚拟配准点的空间坐标;
S7、按照步骤S6列表显示的虚拟配准点的顺序,通过探针点击实体导板上对应的实体配准点,完成实体导板上所有配准点与虚拟导板上的所有配准点的一一对应。光学定位仪实时跟踪参考架和探针,获得实体配准点的空间坐标并同步到神经导航软件;
S8、完成患者头部所代表的实体空间与神经导航软件中患者3D模型空间的配准。
步骤S1中对患者头部进行影像学检查后,将DICOM医学影像文件格式的影像数据导入建模软件中,重建为患者颅面部虚拟3D模型,步骤S2中的虚拟导板建模完成后,紧密贴合在患者颅面部3D模型的面部,步骤S3中的虚拟导板上设计有五个虚拟配准点,步骤S5中光学定位仪对准参考架。S5中的参考架上设有四个呈十字形结构分布于端部的反光球,步骤S7中实体导板上的实体配准点的空间坐标通过探针针尖对实体导板上的实体配准点的点击获取,步骤S7中的探针呈Y形结构,探针上设有不在同一直线上的四个反光球,步骤S7中实体导板上的各个实体配准点的空间坐标被获取后,神经导航软件自动对实体配准点的空间坐标与虚拟配准点的空间坐标进行配准。
在配准前,患者需完成一次CT或MRI影像扫描,扫描范围包括颅顶至鼻尖水平;将DICOM格式的影像数据导入建模软件中,重建为颅面部3D模型,存储为STL格式;根据颅面部3D模型,设计虚拟配准导板,虚拟导板的配准定位部、第一配准固定部、第二配准固定部、第三配准固定部处分别设计第一配准点、第二配准点、第三配准点、第四配准点及第五配准点。最后将虚拟配准导板存储为STL格式,并用3D打印机打印出实体导板,将实体导板放置在患者颅面部上紧贴固定。
将实体导板紧贴患者面部后,将患者颅面部3D模型和虚拟配准导板导入神经导航软件中;将参考架放置在患者头部边上,建立实体空间坐标系,光学定位仪放置在能探测到参考架的位置上;神经导航软件中的虚拟导板紧贴患者颅面部3D模型表面上,使用鼠标分别获取虚拟导板上的第一配准点、第二配准点、第三配准点、第四配准点及第五配准点的三维坐标,使用与光学定位仪配套的探针分别获取实体导板上的第一配准点、第二配准点、第三配准点、第四配准点及第五配准点的三维坐标,通过一一对应的五对配准点,利用SVD算法自动完成实体空间与患者3D模型空间的配准,医生便可通过观察图像上虚拟手术器械的位置来判断真实手术器械同病人之间的相对位置关系。
配准完成后,神经导航可帮助医生定位病灶位置并引导手术操作。且配准完成后,可移除导板,不妨碍手术过程中医生的操作。在神经导航引导的脑部药物递送和神经调控中,此配准导板可反复使用,无需每次为配准进行影像扫描。
如图2所示,一种神经导航空间配准导板,包括与鼻尖部位和鼻根部位重合的配准定位部1,配准定位部1上对应于鼻尖处设有第一配准点11,配准定位部1上对应于鼻根处设有第二配准点12,配准定位部1的侧边延伸有至少一个第一配准固定部13,第一配准固定部13上设有第三配准点131,配准定位部1的侧边设有第二配准固定部14,第二配准固定部14上设有第四配准点141,配准定位部1的侧边设有第三配准固定部15,第三配准固定部15上设有第五配准点151。
上述导板采用的是3D打印树脂材质,轻便无侵害性;上述各个配准固定部均根据对患者头部的扫描影像制作而成,能够紧密贴合在患者头部表面。
第一配准点11、第二配准点12、第三配准点131、第四配准点141及第五配准点151均为孔状结构,第一配准点11、第二配准点12、第三配准点131、第四配准点141及第五配置均点151的直径均为1mm;上述第一配准点、第二配准点、第三配准点、第四配准点及第五配准点均可供探针插入,以便获取配准点坐标。
- 基于手持式扫描仪的神经导航空间配准方法