一种方向盘中位角度标定方法
文献发布时间:2024-01-17 01:14:25
技术领域
本发明涉及电动助力转向系统技术领域,尤其涉及一种方向盘中位角度标定方法。
背景技术
现代汽车装配电动助力转向系统(Electric Power Steering,简称EPS)已经非常普及,当汽车进行转向时,EPS控制器根据方向盘转矩及转角、车速、电机的端电压和电流等信号,进行汽车的转向状态判断,然后发出控制指令来驱动EPS电机,使电机按方向盘转动的速度和方向产生所需要的助力转矩或相关补偿转矩,并通过蜗轮蜗杆减速机构放大后,再通过机械转向器推动车轮转向,从而协助驾驶员进行转向操作
从整车转向系统开发、助力手感参数标定、新车下线、售后的整个生命周期过程中,方向盘中位角位置标定都是其中重要的环节,这是由于车辆在使用中,EPS系统角度中点与车辆直行的角度零点(或称方向盘绝对角度零点)会出现偏差,若不进行中位角度标定,会出现行驶过程中方向跑偏、回正功能异常等等一系列问题,从而影响汽车的操控体验及驾驶员的行驶安全性。
现有技术中,主要是通过扭矩传感器采集扭矩值计算得出角度值,然后再根据角度值推算出中位值,但是,现有技术中角度计算有误差,推算出的中位值与实际中位有偏离。当扭矩信号发生异常时,因角度值与扭矩值强相关联,角度信号也跟随着出现异常,中位角度标定的结果可信度不高。
有鉴于此,需要提出一种新的技术方案来解决上述技术问题。
发明内容
针对现有技术存在的不足,本发明的目的是提供一种方向盘中位角度标定方法,结构简单,装夹方便,能够减少试验过程中产生的误差。
为了实现上述目的,本发明提供了一种方向盘中位角度标定方法,包括以下步骤:
S1:ECU接收标定请求;
S2:判断中位角度标定条件是否满足,如果满足即进入下一步骤,如果不满足则结束本次标定请求;
S3:方向盘角度摆正;
S4:中位角度值计算;
S5:检测中位角度计算结果是否可信,如可信则进入下一步骤,如不可信则向ECU报告标定失败结束本次标定请求;
S6:保存中位角度数据,并结束本次标定请求。
进一步的技术方案中,所述S1中标定请求包括开发阶段下的标定请求和量产阶段下的标定请求。
进一步的技术方案中,所述开发阶段下的标定请求包括整车网络未开发和诊断仪未开发的情况下的标定请求;
当整车网络未开发完成时,通过波动钥匙进行特定的点火操作,来给EPS控制器传达中位角度标定请求,控制器执行中位角度标定的功能。
当诊断仪未开发而整车网络可以正常工作时,可以通过特定的CAN报文,来给EPS控制器传达中位角度标定请求,控制器执行中位角度标定的功能。
进一步的技术方案中,所述量产阶段下的标定请求包括车辆生产阶段和车俩售后阶段下的标定请求;
在车辆生产阶段时,整车在EOL测试(汽车生产线下线检测仪测试)过程中,通过发送UDS诊断命令,来给控制器传达中位角度标定请求,控制器执行中位角度标定的功能;
在车辆在售后阶段时,若车辆因故更换了转向控制系统EPS,则可通过售后诊断仪发送UDS诊断命令,来给控制器传达中位角度标定请求,控制器执行中位角度标定的功能。
进一步的技术方案中,所述S2中通过解析整车的发动机转速、车速信号,判断角度标定的条件是否满足。
进一步的技术方案中,所述S4中位角度值计算包括以下步骤:
a:设置当前角度Ang为最大角度值Ang_max和Ang_min;
b:10ms计时,计时结束后,更新ECU最新获取角度值到Ang中,
c:与上一次存储的最大角度值Ang_max和最小角度值Ang_min进行比较,若角度有变化则更新Ang_max或Ang_min;
d:采集持续时间判断,若大于100ms则结束采集,进入下一步骤,否则重复步骤b、步骤c;
e:判断采集结果,若Ang_max和Ang_min的差值大于5°,则表示方向角度在采集时间段内变化大,则结果不可信,若采集次数大于10,需反馈角度计算结果不可信,否则重复步骤b、步骤c、步骤d重新采集角度值进行计算;若差值小于5°,表示方向角度在采集时间段内变化小,角度计算结果可信,当前采集到的Ang值即为中位角度值。
相比于现有技术,本发明带来以下技术效果:
本发明的一种方向盘中位角度标定方法,通过解析整车的发动机转速、车速信号,判断中位角度标定的条件是否满足,若车辆在行驶过程中则判断条件不满足,拒绝中位标定请求,避免出现在行驶过程中进行中位标定,方向盘中位在行驶过程中进行中位标定会导致驾驶异常,造成安全事故。通过检测中位角度计算结果是否可靠,简单高效,贯穿整个车辆转向系统开发过程,且角度标定结果可信度高,提高了系统的操作性能。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
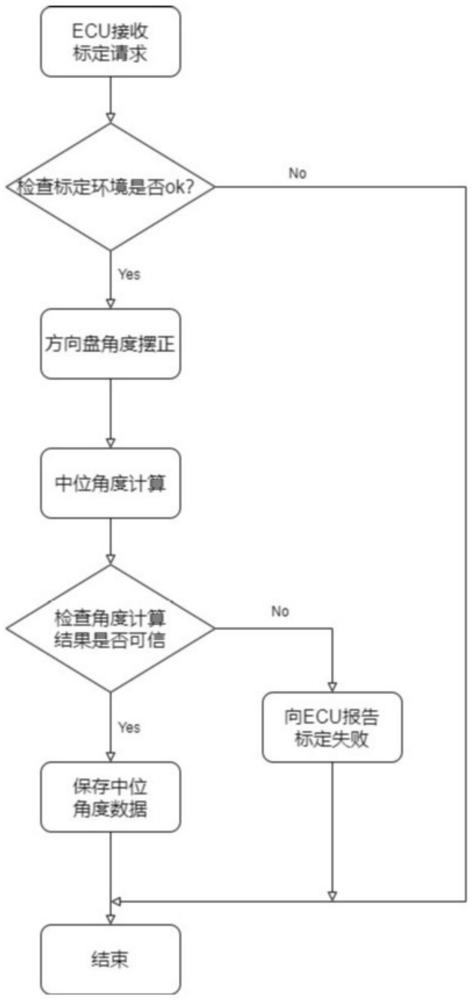
图1是本发明的中位角度标定流程图。
图2是不同阶段下ECU接收中位角度标定请求的示意图。
图3是本发明中位角度值Ang计算流程图。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
实施例
见图1-3所示,一种方向盘中位角度标定方法,包括以下步骤:
S1:ECU接收标定请求;S2:判断中位角度标定条件是否满足,如果满足即进入下一步骤,如果不满足则结束本次标定请求;S3:方向盘角度摆正;S4:中位角度值计算;S5:检测中位角度计算结果是否可信,如可信则进入下一步骤,如不可信则向ECU报告标定失败结束本次标定请求;S6:保存中位角度数据,并结束本次标定请求。
本发明通过解析整车的发动机转速、车速信号,判断中位角度标定的条件是否满足,若车辆在行驶过程中则判断条件不满足,拒绝中位标定请求,避免出现在行驶过程中进行中位标定,方向盘中位在行驶过程中进行中位标定会导致驾驶异常,造成安全事故。通过检测中位角度计算结果是否可靠,简单高效,贯穿整个车辆转向系统开发过程,且角度标定结果可信度高,提高了系统的操作性能。
进一步的具体实施例中,S1中标定请求包括开发阶段下的标定请求和量产阶段下的标定请求。需要说明的是,本发明的方向盘角度标定请求存在于整个车辆转向系统开发生命周期中。通常整车中位角度标定是通过特定设备给控制器发送UDS诊断命令来进行中位标定,但在开发初期阶段,网络异常或缺少设备的情况下,若不能进行中位角度标定,则会影响后续的整车助力参数等数据标定工作。
进一步的具体实施例中,所述开发阶段下的标定请求包括整车网络未开发和诊断仪未开发的情况下的标定请求;
当整车网络未开发完成时,通过波动钥匙进行特定的点火操作,来给EPS控制器传达中位角度标定请求,控制器执行中位角度标定的功能。
当诊断仪未开发而整车网络可以正常工作时,可以通过特定的CAN报文,来给EPS控制器传达中位角度标定请求,控制器执行中位角度标定的功能。
进一步的技术方案中,所述量产阶段下的标定请求包括车辆生产阶段和车俩售后阶段下的标定请求;
在车辆生产阶段时,整车在EOL测试(汽车生产线下线检测仪测试)过程中,通过发送UDS诊断命令,来给控制器传达中位角度标定请求,控制器执行中位角度标定的功能;
在车辆在售后阶段时,若车辆因故更换了转向控制系统EPS,则可通过售后诊断仪发送UDS诊断命令,来给控制器传达中位角度标定请求,控制器执行中位角度标定的功能。
进一步的技术方案中,所述S2中通过解析整车的发动机转速、车速信号,判断角度标定的条件是否满足。
进一步的技术方案中,所述S4中位角度值计算包括以下步骤:
a:设置当前角度Ang为最大角度值Ang_max和Ang_min;
b:10ms计时,计时结束后,更新ECU最新获取角度值到Ang中,
c:与上一次存储的最大角度值Ang_max和最小角度值Ang_min进行比较,若角度有变化则更新Ang_max或Ang_min;
d:采集持续时间判断,若大于100ms则结束采集,进入下一步骤,否则重复步骤b、步骤c;
e:判断采集结果,若Ang_max和Ang_min的差值大于5°,则表示方向角度在采集时间段内变化大,则结果不可信,若采集次数大于10,需反馈角度计算结果不可信,否则重复步骤b、步骤c、步骤d重新采集角度值进行计算;若差值小于5°,表示方向角度在采集时间段内变化小,角度计算结果可信,当前采集到的Ang值即为中位角度值。
工作原理:EPS收到整车的中位角度标定请求后,通过解析整车的发动机转速、车速信号,判断中位角度标定的条件是否满足,若车辆在行驶过程中则判断条件不满足,拒绝中位标定请求,避免出现在行驶过程中进行中位标定,方向盘中位在行驶过程中进行中位标定会导致驾驶异常,造成安全事故。
中位角度标定的环境满足要求后,EPS控制器通过角度传感器获取当前方向盘角度值,计算得出方向盘中位值,存入控制器外置EEPROM(带电可擦可编程只读存储器)中。
EPS控制器每次上电都会从外置EEPROM中获取中位角度值,在驾驶员行驶过程中,ECU会将中位值与海拉扭矩转角传感器获取的实时角度值进行运算,得到真实的方向盘角度值,再根据方向盘的转矩、车速、电机端的电压电流等信号,进行汽车的转向判断,然后发出控制指令来驱动EPS电机,使电机按方向盘转动的速度和方向产生所需要的助力转矩或相关补偿转矩,并通过蜗轮蜗杆减速机构放大后,再通过机械转向器推动车轮转向,从而协助驾驶员进行转向操作,保证驾驶员行驶过程中不会跑偏及回正功能能正常回到中点。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在可以对上述实施例进行变化、修改、替换和变型,只要其符合本发明的目的,均应在本发明要求的保护范围内,譬如:各具体实施例的不同组合,各区别技术特征的不同组合。
- 一种永磁同步电机旋变零位标定系统及标定方法
- 一种角度测量传感器及其标定方法与测量方法
- 一种伺服机构角度标定测量方法
- 一种导向轮偏转角度测量传感器自动标定方法和系统
- 一种可提供位置和角度基准的光学基准件的标定方法
- 一种方向盘中位的调整方法、装置、设备及介质
- 一种方向盘中位定位仪及使用方法