无人飞行器的防破解方法、用户终端以及无人飞行器
文献发布时间:2023-06-19 09:26:02
技术领域
本说明书涉及无人飞行器技术领域,尤其涉及一种无人飞行器的防破解方法、用户终端以及无人飞行器。
背景技术
为保障无人飞行器飞行安全,通常会设置净空区和禁飞区等飞行限制区域。根据无人飞行器的位置和/或用户终端的位置来判断无人飞行器是否处于飞行限制区域内,从而判断是否起飞以及起飞的高度。
但是有时某些用户为了突破这些限制,会采用某些手段来破解或者干扰无人飞行器的位置和/或用户终端的位置,使无人飞行器和/或用户终端上报飞行限制区域外的位置,从而达到在飞行限制区域内自由飞行的目的。例如现有常用的防止定位装置被破解的方法是对定位装置的数据进行认证,但该方法仍然存在技术上被破解的可能,且定位装置被破解后无法通过自检发现被破解。另外,可以通过发射干扰信号,使定位装置解调出错误的位置信息,该问题也无法通过定位装置自检来发现。此时需要有其他手段来判断定位装置是否被破解或干扰。
发明内容
基于此,本说明书提供了一种无人飞行器的防破解方法、用户终端以及无人飞行器,旨在解决通过破解或者干扰无人飞行器的位置和/或用户终端的位置飞入飞行限制区域等技术问题。
第一方面,本说明书提供了一种无人飞行器的防破解方法,用于用户终端,其特征在于,所述方法包括:
获取所述用户终端的终端位置;
获取所述无人飞行器的飞行位置;
根据所述终端位置和所述飞行位置确定所述用户终端和所述无人飞行器之间的定位距离;
获取所述用户终端和所述无人飞行器之间信号传输的延迟信息,根据所述延迟信息确定所述用户终端和所述无人飞行器之间的通信距离;
根据所述定位距离和所述通信距离判断所述飞行位置和所述终端位置是否准确;
若判定所述飞行位置和所述终端位置中的至少一个不准确,控制所述无人飞行器执行预设动作。
第二方面,本说明书提供了一种无人飞行器的防破解方法,用于无人飞行器,其特征在于,所述方法包括:
获取用户终端的终端位置;
获取所述无人飞行器的飞行位置;
根据所述终端位置和所述飞行位置确定所述用户终端和所述无人飞行器之间的定位距离;
获取所述用户终端和所述无人飞行器之间信号传输的延迟信息,根据所述延迟信息确定所述用户终端和所述无人飞行器之间的通信距离;
根据所述定位距离和所述通信距离判断所述飞行位置和所述终端位置是否准确;
若判定所述飞行位置和所述终端位置中的至少一个不准确,执行预设动作。
第三方面,本说明书提供了一种用户终端,其特征在于,包括存储器和处理器;
所述存储器用于存储计算机程序;
所述处理器,用于执行所述计算机程序并在执行所述计算机程序时,实现:
获取所述用户终端的终端位置;
获取无人飞行器的飞行位置;
根据所述终端位置和所述飞行位置确定所述用户终端和所述无人飞行器之间的定位距离;
获取所述用户终端和所述无人飞行器之间信号传输的延迟信息,根据所述延迟信息确定所述用户终端和所述无人飞行器之间的通信距离;
根据所述定位距离和所述通信距离判断所述飞行位置和所述终端位置是否准确;
若判定所述飞行位置和所述终端位置中的至少一个不准确,控制所述无人飞行器执行预设动作。
第四方面,本说明书提供了一种无人飞行器,其特征在于,包括存储器和处理器;
所述存储器用于存储计算机程序;
所述处理器,用于执行所述计算机程序并在执行所述计算机程序时,实现:
获取用户终端的终端位置;
获取所述无人飞行器的飞行位置;
根据所述终端位置和所述飞行位置确定所述用户终端和所述无人飞行器之间的定位距离;
获取所述用户终端和所述无人飞行器之间信号传输的延迟信息,根据所述延迟信息确定所述用户终端和所述无人飞行器之间的通信距离;
根据所述定位距离和所述通信距离判断所述飞行位置和所述终端位置是否准确;
若判定所述飞行位置和所述终端位置中的至少一个不准确,执行预设动作。
第五方面,本说明书提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时使所述处理器实现上述的方法。
本说明书实施例提供了一种无人飞行器的防破解方法、用户终端以及无人飞行器,通过用户终端的终端位置和无人飞行器的飞行位置确定定位距离,并根据用户终端和所述无人飞行器之间信号传输的延迟信息确定所述用户终端和所述无人飞行器之间的通信距离;然后根据准确度较高的通信距离判断飞行位置和终端位置是否均准确,若飞行位置和终端位置中的至少一个不准确,则无人飞行器执行预设动作,以防止通过破解用户终端或者无人飞行器的定位装置控制无人飞行器在飞行限制区域飞行。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本说明书的公开内容。
附图说明
为了更清楚地说明本说明书实施例技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本说明书的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
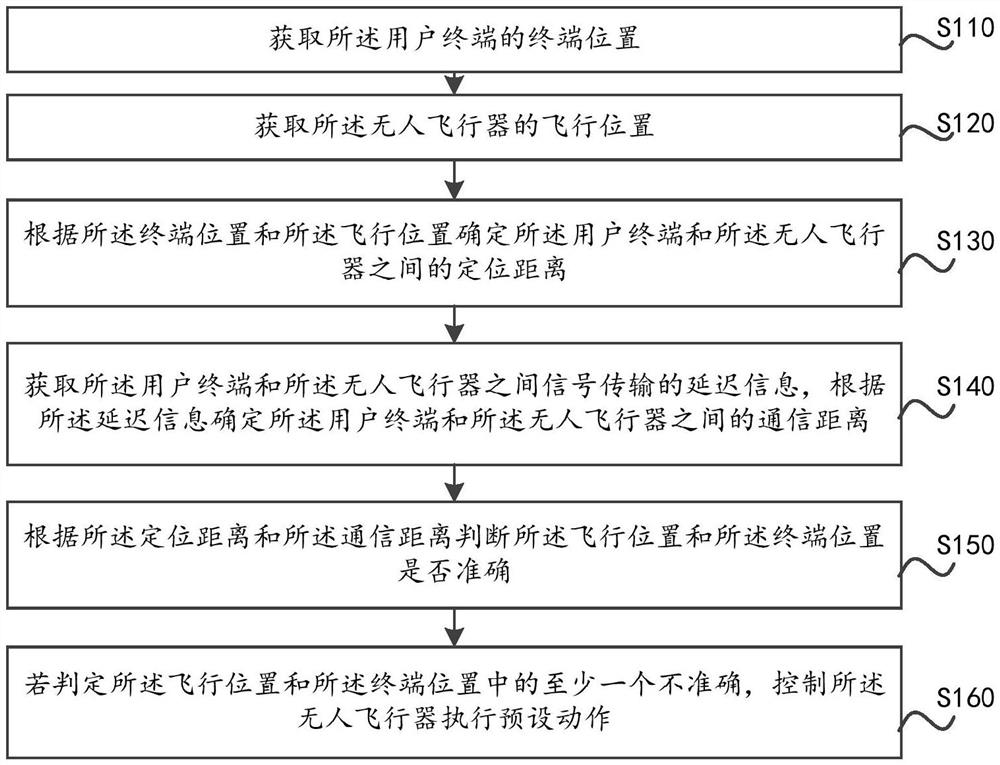
图1是本说明书一实施例提供的一种无人飞行器的防破解方法的流程示意图;
图2是用户终端和无人飞行器通信的示意图;
图3是本说明书另一实施例提供的一种无人飞行器的防破解方法的流程示意图;
图4是本说明书一实施例提供的一种用户终端的示意性框图;
图5是本说明书一实施例提供的一种无人飞行器的示意性框图。
具体实施方式
下面将结合本说明书实施例中的附图,对本说明书实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本说明书一部分实施例,而不是全部的实施例。基于本说明书中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本说明书保护的范围。
附图中所示的流程图仅是示例说明,不是必须包括所有的内容和操作/步骤,也不是必须按所描述的顺序执行。例如,有的操作/步骤还可以分解、组合或部分合并,因此实际执行的顺序有可能根据实际情况改变。
下面结合附图,对本说明书的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
请参阅图1,图1是本说明书一实施例提供的一种无人飞行器的防破解方法的流程示意图。所述防破解方法可以应用在用户终端,用于判断飞行位置和终端位置是否准确,并在飞行位置和终端位置不准确时控制无人飞行器执行预设动作等过程。
其中,用户终端可以包括移动终端、遥控终端、可穿戴设备中的至少一种。移动终端例如手机、平板电脑、笔记本电脑等,遥控终端例如为无人飞行器的遥控器等,可穿戴设备例如为FPV(First Person View,第一人称主视角)眼镜、VR(Virtual Reality,虚拟现实)眼镜等。
无人飞行器例如可以为旋翼型无人机,例如四旋翼无人机、六旋翼无人机、八旋翼无人机,也可以是固定翼无人机。
进一步而言,如图2所示,用户终端和无人飞行器之间通过无线信道进行通信。无人飞行器可以根据用户终端的控制飞行,或者无人飞行器可以自主飞行。用户携带用户终端,在无人飞行器需要自主返航,或者根据用户终端的控制返航时,无人飞行器返回用户终端所在的位置。
示例性的,如图2所示,用户终端可以显示无人飞行器的位置B以及用户终端的位置A。
如图1所示,本实施例无人飞行器的防破解方法包括步骤S110至步骤S160。
S110、获取所述用户终端的终端位置。
示例性的,用户终端搭载有定位装置,例如可以通过导航系统确定用户终端的位置。
示例性的,用户终端获取所述用户终端搭载的定位装置确定的所述用户终端的经纬度。
示例性的,用户终端周期性的获取终端位置。
S120、获取所述无人飞行器的飞行位置。
示例性的,无人飞行器也搭载有定位装置,例如可以通过导航系统确定无人飞行器的位置。
示例性的,用户终端可以从所述无人飞行器获取所述无人飞行器的经纬度,所述无人飞行器的经纬度是所述无人飞行器搭载的定位装置确定的。
示例性的,用户终端周期性的向无人飞行器请求获取无人飞行器的飞行位置。无人飞行器根据用户终端的请求将飞行位置发送给用户终端。或者,无人飞行器周期性的获取飞行位置,并将获取的飞行位置发送给用户终端。
示例性的,在某一时刻,用户终端的终端位置为(x1,y1),且无人飞行器的飞行位置为(x2,y2)。
S130、根据所述终端位置和所述飞行位置确定所述用户终端和所述无人飞行器之间的定位距离。
在一些实施方式中,所述根据所述终端位置和所述飞行位置确定定位距离,包括:根据所述用户终端的经纬度和所述无人飞行器的经纬度确定所述定位距离。
示例性的,所述定位距离表示用户终端的终端位置、无人飞行器的飞行位置在同一水平面上投影之间的距离。
示例性的,用户终端的终端位置为(x1,y1)且无人飞行器的飞行位置为(x2,y2)时,定位距离d可以表示为:
S140、获取所述用户终端和所述无人飞行器之间信号传输的延迟信息,根据所述延迟信息确定所述用户终端和所述无人飞行器之间的通信距离。
具体的,由于用户在使用无人飞行器时,无人飞行器距离用户终端存在一定的距离,以及通信信号在无人飞行器和用户终端之间传递时需要一定的时间才能传到,因此用户终端和无人飞行器之间的信号传输具有延迟。
示例性的,用户终端获取和所述无人飞行器之间信号传输的往返时延。
在一些实施方式中,用户终端周期性的向无人飞行器发送终端信号,无人飞行器响应于用户终端发送的终端信号向所述用户终端发送反馈信号。用户终端根据发送终端信号和接收反馈信号的时间差确定和所述无人飞行器之间信号传输的延迟信息。
在一些实施方式中,用户终端周期性的向无人飞行器请求获取无人飞行器的飞行位置,无人飞行器根据用户终端的请求将飞行位置发送给用户终端。用户终端根据发送请求和接收飞行位置的时间差确定和所述无人飞行器之间信号传输的延迟信息。
在一些实施方式中,用户终端可以从所述无人飞行器获取信号传输的延迟信息。
示例性的,无人飞行器周期性的向用户终端发送飞行端信号,用户终端响应于无人飞行器发送的飞行端信号向所述用户终端发送反馈信号。无人飞行器根据发送飞行端信号和接收反馈信号的时间差确定和所述用户终端之间信号传输的延迟信息,然后无人飞行器可以将该延迟信息发送给所述用户终端。
示例性的,用户终端和无人飞行器之间信号传输的延迟包括信号从用户终端向无人飞行器传输的时间和信号从无人飞行器向用户终端传输的时间,因此用户终端和无人飞行器之间信号传输的延迟信息包括信号传输的往返时延(Round-Trip Time,RTT)。
示例性,用户终端根据所述往返时延确定所述用户终端和所述无人飞行器之间的通信距离。
具体的,根据电磁信号传输的速度,以及所述往返时延确定所述用户终端和所述无人飞行器之间的通信距离。
示例性的,当往返时延为T时,所述用户终端和所述无人飞行器之间的通信距离D可以表示为:D=c×T÷2,其中c表示电磁信号传输的速度。
例如,如果用户终端和无人飞行器的时间同步,则通过往返时延确定的用户终端和无人飞行器之间的往返距离最大误差为0.5个采样点对应的距离。例如采样频率fs为30Msps时,往返距离的估计误差最大为:0.5×c÷fs=5米,其中c表示信号传输的速度,则用户终端和无人飞行器之间单程距离的最大估计误差为5÷2=2.5米。
示例性的,还可以通过增大采样频率,进一步降低用户终端和所述无人飞行器之间的通信距离的最大误差,从而得到更准确的通信距离。
在一些实施方式中,所述获取所述用户终端和所述无人飞行器之间信号传输的延迟信息,包括:根据所述用户终端和所述无人飞行器之间信号携带的时间戳和接收所述信号的时刻确定所述延迟信息。
示例性的,无人飞行器向用户终端发送的飞行位置带有发送时的时间戳,用户终端接收该飞行位置可以得到无人飞行器发送飞行位置的时刻,且用户终端可以确定接收该飞行位置的时刻,从而可以得到信号从无人飞行器向用户终端传输的时间,并根据该传输时间确定户终端和所述无人飞行器之间的通信距离。
具体的,通过时延确定的用户终端和无人飞行器之间的通信距离中包括采样点对应的距离误差。
在一些实施方式中,防破解方法还包括:根据距离误差调整所述通信距离。
例如,可以根据所述用户终端和所述无人飞行器之间信号传输的采样频率确定所述距离误差。当采样频率fs为30Msps时,用户终端和无人飞行器之间单程距离的最大估计误差,即距离误差α为5÷2=2.5米。则可以根据该距离误差调整所述通信距离,得到调整后的通信距离为D+α或者D-α。
S150、根据所述定位距离和所述通信距离判断所述飞行位置和所述终端位置是否准确。
由于通信距离是通过检测发送包和接收包之间的时间间隔,精确计算出的用户终端和无人飞行器之间的相对距离,从而可以根据更为准确的通信距离去验证用户终端的终端位置和无人飞行器的飞行位置是否准确。
示例性的,以无人飞行器的飞行位置为圆心,无人飞行器和用户终端之间的通信距离为半径,可以确定用户终端的位置范围。若用户终端的终端位置超出了该范围,可以判定所述飞行位置和所述终端位置中的至少一个不准确。
示例性的,以用户终端的终端位置为圆心,无人飞行器和用户终端之间的通信距离为半径,可以确定无人飞行器的位置范围。若无人飞行器的飞行位置超出了该范围,可以判定所述飞行位置和所述终端位置中的至少一个不准确。
示例性的,所述判定所述飞行位置和所述终端位置中的至少一个不准确,包括:判定所述飞行位置不准确;或者判定所述终端位置不准确;或者判定所述飞行位置和所述终端位置均不准确。
例如,若可以判断用户终端的终端位置可靠,则判定所述飞行位置不准确;若可以判断无人飞行器的飞行位置可靠,则判定所述终端位置不准确。
示例性的,若所述通信距离和所述定位距离的距离差值不大于预设的偏差阈值,则判定所述飞行位置和所述终端位置准确;若所述通信距离和所述定位距离的距离差值大于所述偏差阈值,则判定所述飞行位置和所述终端位置中的至少一个不准确。
示例性的,可以根据无人飞行器的飞行高度、无人飞行器的飞行速度等确定偏差阈值。
在一些实施方式中,所述根据所述定位距离和所述通信距离判断所述飞行位置和所述终端位置是否准确,包括:根据所述通信距离确定所述用户终端和所述无人飞行器之间的水平距离;根据所述水平距离和所述定位距离的距离差值判断所述飞行位置和所述终端位置是否准确。
在一些实施方式中,无人飞行器飞行的高度较高,例如为数十米或数百米,需要根据通信距离对应的水平距离判断终端位置是否准确。例如可以通过通信距离确定所述通信距离对应的用户终端和所述无人飞行器之间的水平距离。
示例性的,所述用户终端获取所述无人飞行器相对于所述用户终端的飞行高度,根据所述飞行高度和所述通信距离确定所述用户终端和所述无人飞行器之间的水平距离。
在一些实施方式中,所述无人飞行器的返航控制方法还包括:获取所述无人飞行器相对于所述用户终端的飞行高度。
示例性的,用户终端可以从所述无人飞行器获取所述无人飞行器在飞行中相对于地面或者相对于起飞点的高度,根据该高度确定所述无人飞行器相对于所述用户终端的飞行高度。例如根据所述无人飞行器在从起飞点起飞后的高度变化确定所述无人飞行器相对于所述起飞点的飞行高度。
示例性的,无人飞行器在飞行过程中高度可能会变化,例如用户通过用户终端控制无人飞行器调整飞行高度。
示例性的,用户终端周期性的向无人飞行器请求获取无人飞行器的飞行高度。无人飞行器根据用户终端的请求将飞行高度发送给用户终端。或者,无人飞行器周期性的获取飞行高度,并将获取的飞行高度发送给用户终端。从而用户终端可以获取到无人飞行器的实时高度,并根据无人飞行器的飞行高度和所述定位距离、所述通信距离判断所述终端位置是否准确。
例如,通信距离为D,无人飞行器的飞行高度为h,则所述用户终端和所述无人飞行器之间的水平距离为:
在一些实施方式中,步骤S140中的所述根据所述延迟信息确定所述用户终端和所述无人飞行器之间的通信距离,包括:根据所述延迟信息和所述飞行高度确定所述用户终端和所述无人飞行器之间的水平距离。即将水平距离作为用户终端和所述无人飞行器之间的通信距离。
示例性的,所述根据所述水平距离和所述定位距离的距离差值判断所述飞行位置和所述终端位置是否准确,包括:若所述水平距离和所述定位距离的距离差值不大于预设的差值阈值,则判定所述飞行位置和所述终端位置准确;若所述水平距离和所述定位距离的距离差值大于所述差值阈值,则判定所述飞行位置和所述终端位置中的至少一个不准确。
示例性的,若预设的差值阈值表示为e,例如e为20米;所述水平距离和所述定位距离的距离差值为水平距离和定位距离作差的绝对值。则若所述距离差值不大于e,则判定所述飞行位置和所述终端位置准确;若距离差值大于e,则判定所述飞行位置和所述终端位置中的至少一个不准确。
示例性的,可以根据无人飞行器的飞行速度、预设的误差上限等确定差值阈值。
示例性的,无人飞行器确定飞行位置、将飞行位置发送给用户终端等过程的总时长为t,例如t为50毫秒,用户和无人飞行器之间的相对速度的上限为v,例如v为50米每秒,则可以确定差值阈值为:e+v×t。可以防止将偏差较小的终端位置误判为不准确的位置。
示例性的,若有
在一些实施方式中,可以将距离误差考虑在差值阈值中,从而可以不根据距离误差调整通信距离。
示例性的,防破解方法还包括:根据距离误差调整所述差值阈值,所述距离误差时根据所述用户终端和所述无人飞行器之间信号传输的采样频率确定的。
例如,可以根据所述用户终端和所述无人飞行器之间信号传输的采样频率确定所述距离误差。当采样频率fs为30Msps时,用户终端和无人飞行器之间单程距离的最大估计误差,即距离误差α为5÷2=2.5米。则根据距离误差调整所述差值阈值,得到调整后的差值阈值为e+α。
例如,若有
S160、若判定所述飞行位置和所述终端位置中的至少一个不准确,控制所述无人飞行器执行预设动作。
若判定所述飞行位置和所述终端位置中的至少一个不准确,则可以确定无人飞行器和用户终端中的至少一个的定位不准确,可能被破解或干扰,从而可以控制无人飞行器执行预设动作,例如用户终端控制所述无人飞行器执行下降、返航或者禁止起飞中的一种。
在一些实施场景中,无人飞行器在某一时刻从起飞点飞离用户,无人飞行器和用户终端之间的距离越来越远,根据信号传输的延迟信息确定的通信距离也更加精确,例如距离从0增加至2.5米时,由于距离误差的存在还无法准确确定通信距离,随着距离的进一步增大,距离误差的影响越来越小,通信距离也更加精确。若在某一时刻根据定位距离和通信距离确定飞行位置和终端位置中至少有一个不准确,则控制所述无人飞行器强制下降或返航。以防止通过破解用户终端或者无人飞行器的定位装置控制无人飞行器在飞行限制区域飞行。
示例性的,若在某一时刻判定用户终端的终端位置不准确,则控制所述无人飞行器强制下降。无人飞行器在下降过程中可以通过双目摄像头或者下视摄像头确定相对地面的高度,根据该高度可以确定下降的高度,防止触地。
示例性的,若在某一时刻判定无人飞行器的飞行位置不准确,或者判定飞行位置和终端位置均不准确,则控制所述无人飞行器返航,或者控制所述无人飞行器禁止起飞。示例性的,在判定无人飞行器的飞行位置和终端位置中至少有一个不准确,且控制所述无人飞行器禁止起飞之后,可以在经过预设时长之后,解除禁止起飞的状态,则用户终端可以正常控制无人飞行器。
示例性的,在判定无人飞行器的飞行位置和终端位置中至少有一个不准确,且在控制所述无人飞行器返航或者下降的过程中,若在某个时刻根据所述定位距离和所述通信距离判断所述飞行位置和所述终端位置均准确,则用户终端可以正常控制无人飞行器。
在一些实施方式中,防破解方法还包括:若判定所述飞行位置和所述终端位置中的至少一个不准确,发出提示信息,所述提示信息用于提示用户所述无人飞行器和所述用户终端中的至少一个定位不准确。例如提示用户无法正常控制无人飞行器飞行。
本说明书实施例提供的无人飞行器的防破解方法,通过用户终端的终端位置和无人飞行器的飞行位置确定定位距离,并根据用户终端和所述无人飞行器之间信号传输的延迟信息确定所述用户终端和所述无人飞行器之间的通信距离;然后根据准确度较高的通信距离判断飞行位置和终端位置是否均准确,若飞行位置和终端位置中的至少一个不准确,则控制无人飞行器执行预设动作,以防止通过破解用户终端或者无人飞行器的定位装置控制无人飞行器在飞行限制区域飞行。
请参阅图3,图3是本申请另一实施例提供的一种无人飞行器的防破解方法的流程示意图。所述防破解方法可以应用在无人飞行器,用于判断飞行位置和终端位置是否准确,并在飞行位置和终端位置不准确时控制无人飞行器执行预设动作等过程。
其中,用户终端可以包括移动终端、遥控终端、可穿戴设备中的至少一种。移动终端例如手机、平板电脑、笔记本电脑等,遥控终端例如为无人飞行器的遥控器等,可穿戴设备例如为FPV(First Person View,第一人称主视角)眼镜、VR(Virtual Reality,虚拟现实)眼镜等。
无人飞行器例如可以为旋翼型无人机,例如四旋翼无人机、六旋翼无人机、八旋翼无人机,也可以是固定翼无人机。
如图3所示,本实施例无人飞行器的防破解方法包括步骤S210至步骤S260。
S210、获取用户终端的终端位置。
示例性的,用户终端搭载有定位装置,例如可以通过导航系统确定用户终端的位置。
示例性的,无人飞行器可以从用户终端获取所述用户终端的经纬度,所述用户终端的经纬度是所述用户终端搭载的定位装置确定的。
示例性的,无人飞行器周期性的向用户终端请求获取用户终端的终端位置。用户终端根据无人飞行器的请求将终端位置发送给无人飞行器。或者,用户终端周期性的获取终端位置,并将获取的终端位置发送给无人飞行器。
S220、获取所述无人飞行器的飞行位置。
示例性的,无人飞行器也搭载有定位装置,例如可以通过导航系统确定无人飞行器的位置。
示例性的,无人飞行器获取所述无人飞行器搭载的定位装置确定的所述无人飞行器的经纬度。
示例性的,无人飞行器周期性的获取飞行位置。
示例性的,在某一时刻,用户终端的终端位置为(x1,y1),且无人飞行器的飞行位置为(x2,y2)。
S230、根据所述终端位置和所述飞行位置确定所述用户终端和所述无人飞行器之间的定位距离。
在一些实施方式中,所述根据所述终端位置和所述飞行位置确定定位距离,包括:无人飞行器根据所述用户终端的经纬度和所述无人飞行器的经纬度确定所述定位距离。
示例性的,所述定位距离表示用户终端的终端位置、无人飞行器的飞行位置在同一水平面上投影之间的距离。
示例性的,用户终端的终端位置为(x1,y1)且无人飞行器的飞行位置为(x2,y2)时,定位距离d可以表示为:
S240、获取所述用户终端和所述无人飞行器之间信号传输的延迟信息,根据所述延迟信息确定所述用户终端和所述无人飞行器之间的通信距离。
具体的,由于用户在使用无人飞行器时,无人飞行器距离用户终端存在一定的距离,以及通信信号在无人飞行器和用户终端之间传递时需要一定的时间才能传到,因此用户终端和无人飞行器之间的信号传输具有延迟。
示例性的,无人飞行器获取和所述用户终端之间信号传输的往返时延。
在一些实施方式中,无人飞行器周期性的向用户终端发送飞行端信号,用户终端响应于无人飞行器发送的飞行端信号向所述无人飞行器发送反馈信号。无人飞行器根据发送飞行端信号和接收反馈信号的时间差确定和所述用户终端之间信号传输的延迟信息。
在一些实施方式中,无人飞行器周期性的向用户终端请求获取用户终端的终端位置,用户终端根据无人飞行器的请求将终端位置发送给无人飞行器。无人飞行器根据发送请求和接收终端位置的时间差确定和所述用户终端之间信号传输的延迟信息。
在一些实施方式中,无人飞行器可以从用户终端获取信号传输的延迟信息。
示例性的,用户终端周期性的向无人飞行器发送终端信号,无人飞行器响应于用户终端发送的终端信号向所述无人飞行器发送反馈信号。用户终端根据发送终端信号和接收反馈信号的时间差确定和所述无人飞行器之间信号传输的延迟信息,然后用户终端可以将该延迟信息发送给所述无人飞行器。
示例性的,用户终端和无人飞行器之间信号传输的延迟包括信号从用户终端向无人飞行器传输的时间和信号从无人飞行器向用户终端传输的时间,因此用户终端和无人飞行器之间信号传输的延迟信息包括信号传输的往返时延(Round-Trip Time,RTT)。
示例性,无人飞行器根据所述往返时延确定所述用户终端和所述无人飞行器之间的通信距离。
具体的,根据电磁信号传输的速度,以及所述往返时延确定所述用户终端和所述无人飞行器之间的通信距离。
示例性的,当往返时延为T时,所述用户终端和所述无人飞行器之间的通信距离D可以表示为:D=c×T÷2,其中c表示电磁信号传输的速度。
例如,如果用户终端和无人飞行器的时间同步,则通过往返时延确定的用户终端和无人飞行器之间的往返距离最大误差为0.5个采样点对应的距离。例如采样频率fs为30Msps时,往返距离的估计误差最大为:0.5×c÷fs=5米,其中c表示信号传输的速度,则用户终端和无人飞行器之间单程距离的最大估计误差为5÷2=2.5米。
示例性的,还可以通过增大采样频率,进一步降低用户终端和所述无人飞行器之间的通信距离的最大误差,从而得到更准确的通信距离。
在一些实施方式中,所述获取所述用户终端和所述无人飞行器之间信号传输的延迟信息,包括:根据所述用户终端和所述无人飞行器之间信号携带的时间戳和接收所述信号的时刻确定所述延迟信息。
示例性的,用户终端向无人飞行器发送的终端位置带有发送时的时间戳,无人飞行器接收该终端位置可以得到用户终端发送该终端位置的时刻,且无人飞行器可以确定接收该终端位置的时刻,从而可以得到信号从用户终端向无人飞行器传输的时间,并根据该传输时间确定户终端和所述无人飞行器之间的通信距离。
具体的,通过时延确定的用户终端和无人飞行器之间的通信距离中包括采样点对应的距离误差。
在一些实施方式中,防破解方法还包括:根据距离误差调整所述通信距离。
例如,可以根据所述用户终端和所述无人飞行器之间信号传输的采样频率确定所述距离误差。当采样频率fs为30Msps时,用户终端和无人飞行器之间单程距离的最大估计误差,即距离误差α为5÷2=2.5米。则可以根据该距离误差调整所述通信距离,得到调整后的通信距离为D+α或者D-α。
S250、根据所述定位距离和所述通信距离判断所述飞行位置和所述终端位置是否准确。
由于通信距离是通过检测发送包和接收包之间的时间间隔,精确计算出的用户终端和无人飞行器之间的相对距离,从而可以根据更为准确的通信距离去验证用户终端的终端位置和无人飞行器的飞行位置是否准确。
示例性的,以无人飞行器的飞行位置为圆心,无人飞行器和用户终端之间的通信距离为半径,可以确定用户终端的位置范围。若用户终端的终端位置超出了该范围,可以判定所述飞行位置和所述终端位置中的至少一个不准确。
示例性的,以用户终端的终端位置为圆心,无人飞行器和用户终端之间的通信距离为半径,可以确定无人飞行器的位置范围。若无人飞行器的飞行位置超出了该范围,可以判定所述飞行位置和所述终端位置中的至少一个不准确。
示例性的,所述判定所述飞行位置和所述终端位置中的至少一个不准确,包括:判定所述飞行位置不准确;或者判定所述终端位置不准确;或者判定所述飞行位置和所述终端位置均不准确。
例如,若可以判断用户终端的终端位置可靠,则判定所述飞行位置不准确;若可以判断无人飞行器的飞行位置可靠,则判定所述终端位置不准确。
示例性的,若所述通信距离和所述定位距离的距离差值不大于预设的偏差阈值,则判定所述飞行位置和所述终端位置准确;若所述通信距离和所述定位距离的距离差值大于所述偏差阈值,则判定所述飞行位置和所述终端位置中的至少一个不准确。
示例性的,可以根据无人飞行器的飞行高度、无人飞行器的飞行速度等确定偏差阈值。
在一些实施方式中,所述根据所述定位距离和所述通信距离判断所述飞行位置和所述终端位置是否准确,包括:根据所述通信距离确定所述用户终端和所述无人飞行器之间的水平距离;根据所述水平距离和所述定位距离的距离差值判断所述飞行位置和所述终端位置是否准确。
在一些实施方式中,无人飞行器飞行的高度较高,例如为数十米或数百米,需要根据通信距离对应的水平距离判断终端位置是否准确。例如可以通过通信距离确定所述通信距离对应的用户终端和所述无人飞行器之间的水平距离。
示例性的,所述用户终端从所述无人飞行器获取所述无人飞行器相对于所述用户终端的飞行高度,根据所述飞行高度和所述通信距离确定所述用户终端和所述无人飞行器之间的水平距离。
在一些实施方式中,所述无人飞行器的返航控制方法还包括:获取所述无人飞行器相对于所述用户终端的飞行高度。
示例性的,所述无人飞行器周期性获取所述无人飞行器在飞行中相对于地面或者相对于起飞点的高度,根据该高度确定所述无人飞行器相对于所述用户终端的飞行高度。如根据所述无人飞行器在从起飞点起飞后的高度变化确定所述无人飞行器相对于所述起飞点的飞行高度。
示例性的,无人飞行器在飞行过程中高度可能会变化,例如用户通过用户终端控制无人飞行器调整飞行高度。无人飞行器周期性获取飞行高度,可以获取到无人飞行器的实时高度,并根据无人飞行器的飞行高度和所述定位距离、所述通信距离判断所述终端位置是否准确。
例如,通信距离为D,无人飞行器的飞行高度为h,则所述用户终端和所述无人飞行器之间的水平距离为:
在一些实施方式中,步骤S240中的所述根据所述延迟信息确定所述用户终端和所述无人飞行器之间的通信距离,包括:根据所述延迟信息和所述飞行高度确定所述用户终端和所述无人飞行器之间的水平距离。即将水平距离作为用户终端和所述无人飞行器之间的通信距离。
示例性的,所述根据所述水平距离和所述定位距离的距离差值判断所述飞行位置和所述终端位置是否准确,包括:若所述水平距离和所述定位距离的距离差值不大于预设的差值阈值,则判定所述飞行位置和所述终端位置准确;若所述水平距离和所述定位距离的距离差值大于所述差值阈值,则判定所述飞行位置和所述终端位置中的至少一个不准确。
示例性的,若预设的差值阈值表示为e,例如e为20米;所述水平距离和所述定位距离的距离差值为水平距离和定位距离作差的绝对值。则若所述距离差值不大于e,则判定所述飞行位置和所述终端位置准确;若距离差值大于e,则判定所述飞行位置和所述终端位置中的至少一个不准确。
示例性的,可以根据无人飞行器的飞行速度、预设的误差上限等确定差值阈值。
示例性的,无人飞行器确定飞行位置、将飞行位置发送给用户终端等过程的总时长为t,例如t为50毫秒,用户和无人飞行器之间的相对速度的上限为v,例如v为50米每秒,则可以确定差值阈值为:e+v×t。可以防止将偏差较小的终端位置误判为不准确的位置。
示例性的,若有
在一些实施方式中,可以将距离误差考虑在差值阈值中,从而可以不根据距离误差调整通信距离。
示例性的,防破解方法还包括:根据距离误差调整所述差值阈值,所述距离误差时根据所述用户终端和所述无人飞行器之间信号传输的采样频率确定的。
例如,可以根据所述用户终端和所述无人飞行器之间信号传输的采样频率确定所述距离误差。当采样频率fs为30Msps时,用户终端和无人飞行器之间单程距离的最大估计误差,即距离误差α为5÷2=2.5米。则根据距离误差调整所述差值阈值,得到调整后的差值阈值为e+α。
例如,若有
S260、若判定所述飞行位置和所述终端位置中的至少一个不准确,执行预设动作。
若判定所述飞行位置和所述终端位置中的至少一个不准确,则可以确定无人飞行器和用户终端中的至少一个的定位不准确,可能被破解或干扰,从而所述无人飞行器执行预设动作,例如所述无人飞行器执行下降、返航或者禁止起飞中的一种。
在一些实施场景中,无人飞行器在某一时刻从起飞点飞离用户,无人飞行器和用户终端之间的距离越来越远,根据信号传输的延迟信息确定的通信距离也更加精确,例如距离从0增加至2.5米时,由于距离误差的存在还无法准确确定通信距离,随着距离的进一步增大,距离误差的影响越来越小,通信距离也更加精确。若在某一时刻根据定位距离和通信距离确定飞行位置和终端位置中至少有一个不准确,则所述无人飞行器强制下降或返航。以防止通过破解用户终端或者无人飞行器的定位装置控制无人飞行器在飞行限制区域飞行。
示例性的,若在某一时刻判定用户终端的终端位置不准确,则所述无人飞行器强制下降。无人飞行器在下降过程中可以通过双目摄像头或者下视摄像头确定相对地面的高度,根据该高度可以确定下降的高度,防止触地。
示例性的,若在某一时刻判定无人飞行器的飞行位置不准确,或者判定飞行位置和终端位置均不准确,则所述无人飞行器返航,或者所述无人飞行器禁止起飞。示例性的,在判定无人飞行器的飞行位置和终端位置中至少有一个不准确,且所述无人飞行器禁止起飞之后,可以在经过预设时长之后,解除禁止起飞的状态,则用户终端可以正常控制无人飞行器。
示例性的,在判定无人飞行器的飞行位置和终端位置中至少有一个不准确,且在控制所述无人飞行器返航或者下降的过程中,若在某个时刻根据所述定位距离和所述通信距离判断所述飞行位置和所述终端位置均准确,则用户终端可以正常控制无人飞行器。
在一些实施方式中,防破解方法还包括:若判定所述飞行位置和所述终端位置中的至少一个不准确,所述无人飞行器向所述用户终端发送错误通知,以使所述用户终端根据所述错误通知提示用户所述无人飞行器和所述用户终端中的至少一个定位不准确。例如提示用户无法正常控制无人飞行器飞行。
本说明书实施例提供的无人飞行器的防破解方法,通过用户终端的终端位置和无人飞行器的飞行位置确定定位距离,并根据用户终端和所述无人飞行器之间信号传输的延迟信息确定所述用户终端和所述无人飞行器之间的通信距离;然后根据准确度较高的通信距离判断飞行位置和终端位置是否均准确,若飞行位置和终端位置中的至少一个不准确,则无人飞行器执行预设动作,以防止通过破解用户终端或者无人飞行器的定位装置控制无人飞行器在飞行限制区域飞行。
请结合上述实施例参阅图4,图4是本说明书一实施例提供的用户终端600的示意性框图。该用户终端600包括处理器601和存储器602。
示例性的,处理器601和存储器602通过总线603连接,该总线603比如为I2C(Inter-integrated Circuit)总线。
具体地,处理器601可以是微控制单元(Micro-controller Unit,MCU)、中央处理单元(Central Processing Unit,CPU)或数字信号处理器(Digital Signal Processor,DSP)等。
具体地,存储器602可以是Flash芯片、只读存储器(ROM,Read-Only Memory)磁盘、光盘、U盘或移动硬盘等。
其中,所述处理器601用于运行存储在存储器602中的计算机程序,并在执行所述计算机程序时实现前述的用于用户终端的无人飞行器的防破解方法。
示例性的,所述处理器601用于运行存储在存储器602中的计算机程序,并在执行所述计算机程序时实现如下步骤:
获取所述用户终端的终端位置;
获取无人飞行器的飞行位置;
根据所述终端位置和所述飞行位置确定所述用户终端和所述无人飞行器之间的定位距离;
获取所述用户终端和所述无人飞行器之间信号传输的延迟信息,根据所述延迟信息确定所述用户终端和所述无人飞行器之间的通信距离;
根据所述定位距离和所述通信距离判断所述飞行位置和所述终端位置是否准确;
若判定所述飞行位置和所述终端位置中的至少一个不准确,控制所述无人飞行器执行预设动作。
本说明书实施例提供的用户终端的具体原理和实现方式均与前述实施例的用于用户终端的无人飞行器的防破解方法类似,此处不再赘述。
本说明书的实施例中还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序中包括程序指令,所述处理器执行所述程序指令,实现上述实施例提供的用于用户终端的无人飞行器的防破解方法的步骤。
其中,所述计算机可读存储介质可以是前述任一实施例所述的用户终端的内部存储单元,例如所述用户终端的硬盘或内存。所述计算机可读存储介质也可以是所述用户终端的外部存储设备,例如所述用户终端上配备的插接式硬盘,智能存储卡(Smart MediaCard,SMC),安全数字(Secure Digital,SD)卡,闪存卡(Flash Card)等。
请结合上述实施例参阅图5,图5是本说明书一实施例提供的无人飞行器700的示意性框图。该无人飞行器700包括处理器701和存储器702。
示例性的,处理器701和存储器702通过总线703连接,该总线703比如为I2C(Inter-integrated Circuit)总线。
具体地,处理器701可以是微控制单元(Micro-controller Unit,MCU)、中央处理单元(Central Processing Unit,CPU)或数字信号处理器(Digital Signal Processor,DSP)等。
具体地,存储器702可以是Flash芯片、只读存储器(ROM,Read-Only Memory)磁盘、光盘、U盘或移动硬盘等。
其中,所述处理器701用于运行存储在存储器702中的计算机程序,并在执行所述计算机程序时实现前述的用于无人飞行器的防破解方法。
示例性的,所述处理器701用于运行存储在存储器702中的计算机程序,并在执行所述计算机程序时实现如下步骤:
获取用户终端的终端位置;
获取所述无人飞行器的飞行位置;
根据所述终端位置和所述飞行位置确定所述用户终端和所述无人飞行器之间的定位距离;
获取所述用户终端和所述无人飞行器之间信号传输的延迟信息,根据所述延迟信息确定所述用户终端和所述无人飞行器之间的通信距离;
根据所述定位距离和所述通信距离判断所述飞行位置和所述终端位置是否准确;
若判定所述飞行位置和所述终端位置中的至少一个不准确,执行预设动作。
本说明书实施例提供的无人飞行器的具体原理和实现方式均与前述实施例的用于无人飞行器的防破解方法类似,此处不再赘述。
本说明书的实施例中还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序中包括程序指令,所述处理器执行所述程序指令,实现上述实施例提供的用于无人飞行器的防破解方法的步骤。
其中,所述计算机可读存储介质可以是前述任一实施例所述的无人飞行器的内部存储单元,例如所述无人飞行器的硬盘或内存。所述计算机可读存储介质也可以是所述无人飞行器的外部存储设备,例如所述无人飞行器上配备的插接式硬盘,智能存储卡(SmartMedia Card,SMC),安全数字(Secure Digital,SD)卡,闪存卡(Flash Card)等。
本说明书上述实施例提供的用户终端、无人飞行器和计算机可读存储介质,通过用户终端的终端位置和无人飞行器的飞行位置确定定位距离,并根据用户终端和所述无人飞行器之间信号传输的延迟信息确定所述用户终端和所述无人飞行器之间的通信距离;然后根据准确度较高的通信距离判断飞行位置和终端位置是否均准确,若飞行位置和终端位置中的至少一个不准确,则无人飞行器执行预设动作,以防止通过破解用户终端或者无人飞行器的定位装置控制无人飞行器在飞行限制区域飞行。
应当理解,在此本说明书中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本说明书。
还应当理解,在本说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
以上所述,仅为本说明书的具体实施方式,但本说明书的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本说明书揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本说明书的保护范围之内。因此,本说明书的保护范围应以权利要求的保护范围为准。
- 无人飞行器的防破解方法、用户终端以及无人飞行器
- 无人飞行器的遥控器、无人飞行器的航拍控制方法和无人飞行器航拍系统