一种基于无人巡检系统的变电站巡检方法
文献发布时间:2023-06-19 09:26:02
技术领域
本发明涉及一种用于变电站无人巡检领域的基于无人巡检系统的变电站巡检方法。
背景技术
电力设备巡检是变电站运行维护管理工作的重要构成内容,通过对变电站设备的定期巡检,可以及时发现并消除各类设备缺陷,预防事件发生,确定安全运行,从而促进电网健康、稳定运行。
由于电力设备种类繁多,可能产生的设备缺陷类型较多,针对不同的设备类型需要针对性的细化布置巡检点和巡检项目,以确保巡检任务能完整性和有效性。
当前,上海电力公司下属变电站基本采用无人值守方式,运检人员通常驻留在巡检中心站,负责区域内多达数十个变电站的运行值班和巡检工作。由于变电站分布离散,运检人员要同时兼顾数十个变电站的运行值班工作,工作负荷本已较高,同时还要去变电站现场实施巡检,这种繁重的工作不仅需要耗费大量的人力物力,其产生的效果不算良好。尤其是遇到特殊天气,一方面运行要求电力设施能保证在极端情况下的稳定运行,而实际上的巡检工作复杂性加,具有较高的执行难度,无法保证真正落实到位。
目前,变电站智能辅助系统的设备种类繁多,同一功能的设备也可能存在不同的供应商,就算同一供应商也存在不同生产版次形成太大的功能差异,这些系统要么处理孤岛运行状态,要么采用简单的拼装式集成,系统之间更谈不上信息共享、协作联动。这些离散或简易集成的辅控系统在应用方面受到较大的局限,使用不便,无法更大发挥其电力生产的辅助性作用,同时还增加了运检人员的运维工作量。主要存在的问题在于:运检人员配置有限,而一个运检中心要负责的变电站数量较多,分布地域太广,原则上一些重要设备的状态/读数(如变压器油温、线温指示,开关、刀闸、地刀的状态、SF6压力指示等)需要每日巡查,而现行人员配置无法达到相关巡检要求,因此导致巡检的周期拉长,如遇雷暴、骤雨等极端天气,更是导致巡查工作无法按时开展。
一些变电站为了保证巡检的方便,已在站内安装了视频摄像机,或者无人巡检机器人摄像巡检,运检人员可通过摄像机远程来观察重要设备的运行情况,但是运检人员要通过视频逐一查看每个重要设备的状态/读数,仍旧是一件非常耗费人力和时间的事,导致运检人员疲于巡检工作,造成疏忽。同时,远程巡检缺少了现场巡检的打卡式记录,容易造成巡检走形势或根本不执行巡检的工作漏洞,严重威胁着电力设施的运营安全性。
发明内容
本发明的目的是为了克服现有技术的不足,提供一种一种基于无人巡检系统的变电站巡检方法,能够实现对于变电站的自动高效巡检作业。
实现上述目的的一种技术方案是:一种基于无人巡检系统的变电站巡检方法,由系统管理员、运检作业人员、无人巡检系统、智能辅控系统和SCADA系统组成,该基于无人巡检系统的变电站巡检方法具体步骤如下:
步骤1,所述系统管理员针对变电站内不同类型的设备,对应每一种类型的设备制定相应的巡检计划和策略;
步骤2,全部巡检计划和策略在无人巡检系统内生成巡检任务,由无人巡检机器人载入对应的巡检任务数据,执行巡检任务;
步骤3,在执行巡检任务时,巡检机器人依次载入具体的巡检项目,获取巡检项目对应设备的视频巡检信号向智能辅控系统传输,由智能辅控系统获取视频或视频关键帧数据,经过无人巡检系统对获取的数据进行分析和提取,以获得设备状态数据;
步骤4.1,对于需要与SCADA系统比对的设备状态数据,将其与SCADA系统的设备状态进行比对,以确认是否异常;
步骤4.2,对于无需与SCADA系统比对的设备状态数据,与无人巡检内预设数据进行比对,以确认是否异常;
步骤5.1,如异常则记录异常或缺陷,并通知运检作业人员执行异常、缺陷管理,然后记录巡检项目数据;
步骤5.2,如无异常则直接记录巡检项目数据;
步骤6,完成一个巡检项目的执行,进行下一个巡检项目的执行,直至完成全部巡检项目,即完成巡检任务;
步骤7,生成巡线任务执行情况记录。
进一步的,所述运检作业人员能够根据巡检要求或实际情况临时创建特巡计划和策略,在无人巡检系统内生成特巡任务。
进一步的,所述运检作业人员能够登入所述无人巡检系统,查询所述巡线任务执行情况记录。
本发明的一种基于无人巡检系统的变电站巡检方法,可标准化的实现对于常规设备类型(包括并不限于断路器、隔离开关、接地刀闸、压板、切换把手、指示灯状态、仪表指针、仪表数值等)的识别和巡检,极大的提升了巡检的效率,减少了人力负担。
附图说明
图1为本发明的一种基于无人巡检系统的变电站巡检方法的流程示意图。
具体实施方式
为了能更好地对本发明的技术方案进行理解,下面通过具体地实施例进行详细地说明:
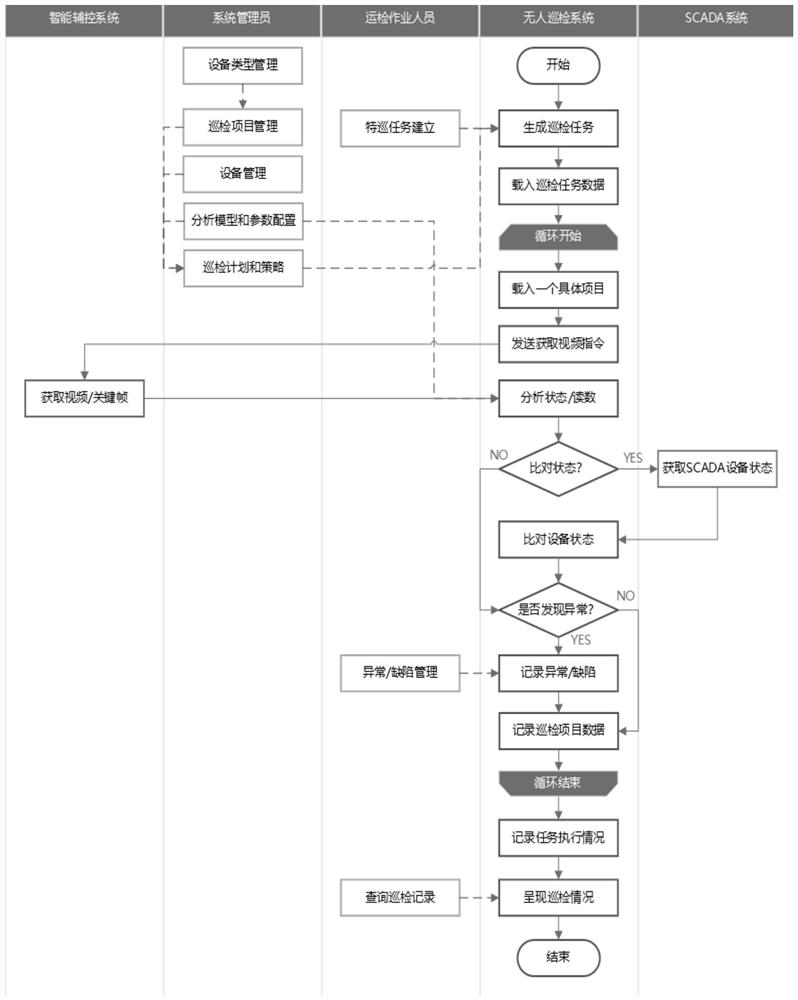
请参阅图1,本发明的一种基于无人巡检系统的变电站巡检方法,由系统管理员、运检作业人员、无人巡检系统、智能辅控系统和SCADA系统组成。
该基于无人巡检系统的变电站巡检方法具体步骤如下:
步骤1,系统管理员针对变电站内不同类型的设备,对应每一种类型的设备设立一个巡检项目,该项目内保存有对于设备的管理、对于设备的分析模型和分析参数,然后根据项目内容和巡检要求(如巡检频率等)制定相应的巡检计划和策略。
步骤2,全部巡检计划和策略在无人巡检系统内生成巡检任务,由无人巡检机器人载入对应的巡检任务数据,执行巡检任务。运检作业人员能够根据巡检要求或实际情况临时创建特巡计划和策略,在无人巡检系统内生成特巡任务由无人巡检机器人执行。
步骤3,在执行巡检任务时,巡检机器人依次载入具体的巡检项目,获取巡检项目对应设备的视频巡检信号向智能辅控系统传输。智能辅控系统获取视频或视频关键帧数据,该视频或关键帧数据包括并不限于断路器、隔离开关、接地刀闸、压板、切换把手等的开合方向和状态,指示灯的点亮位置、点亮颜色,仪表指针的指针转动角度及所对应的数值,仪表具体数值。上述图像信息经过无人巡检系统的分析和提取,形成对应的设备状态数据。
步骤4.1,对于需要与SCADA系统比对的设备状态数据,将其与SCADA系统的设备状态进行比对,以确认是否异常;
步骤4.2,对于无需与SCADA系统比对的设备状态数据,与无人巡检内预设数据进行比对,以确认是否异常;
步骤5.1,如异常则记录异常或缺陷,并通知运检作业人员执行异常、缺陷管理,然后记录巡检项目数据;
步骤5.2,如无异常则直接记录巡检项目数据;
步骤6,完成一个巡检项目的执行,进行下一个巡检项目的执行,直至完成全部巡检项目,即完成巡检任务;
步骤7,生成巡线任务执行情况记录。所述运检作业人员能够登入所述无人巡检系统,查询所述巡线任务执行情况记录。
本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本发明,而并非用作为对本发明的限定,只要在本发明的实质精神范围内,对以上所述实施例的变化、变型都将落在本发明的权利要求书范围内。
- 一种基于无人巡检系统的变电站巡检方法
- 一种基于适用于变电站使用的无人机高精度定位巡检系统