热喷涂喷枪轨迹校准方法及轴承喷涂方法
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及一种热喷涂喷枪轨迹校准方法及轴承喷涂方法。
背景技术
为解决电机轴承等设备上因感应电流导致的电火花,而在轴承滚道和滚动体表面形成电蚀,通常需要在轴承外圈的外周面和端面以及内圈的内壁面和端面上喷涂绝缘涂层。绝缘涂层通常为氧化铝陶瓷涂层,采用等离子喷涂工艺。
在喷涂的实际过程中,氩气与氮气或者氩气与氢气一起形成等离子火焰,从喷枪喷嘴中产生具有一定直径的火焰斑点,氧化铝粉末经由送粉装置沿送粉管送入喷嘴处火焰中心后,被加热到半熔融或熔融状态,然后随焰流加速到一定初速度后,喷射到预处理过的基体表面,沉积冷却而形成具有高绝缘性能的氧化铝陶瓷涂层。
目前,在点枪送粉后,焰流存在火焰偏角。如图1和图2所示,在送粉管13未送粉时,喷枪10喷出的未送粉火焰11竖直向下;在送粉管13送粉后,在送粉管13气流作用下,喷枪10喷出的送粉后火焰12向一侧偏斜。如图3和图4所示,送粉后火焰轴线14和未送粉火焰轴线15形成偏角α,且在喷涂平面上形成的送粉后火焰轨迹16和未送粉火焰轨迹17的偏距为S。使得喷涂点位存在较大误差。
为了解决上述问题,在喷涂调试工序时,其中一种喷涂方式是依据目测进行喷枪轨迹起始点的确定和编程,如通过试喷涂的方式观察工件基体上涂层的覆盖区域,该喷涂方式需要多次停枪观察喷涂轨迹,不仅会降低喷涂效率,影响热喷涂涂层质量,而且频繁的点枪停枪也会对喷枪电极等重要部件造成非正常损耗;另一种喷涂方式是直接将调试区域设置为大范围覆盖,来消除误差,该喷涂方式将会造成粉料的浪费,增加成本。
发明内容
本发明的目的是提供一种热喷涂喷枪轨迹校准方法,以解决现有技术中由于送粉管气流的作用导致喷涂点位存在较大误差的问题;本发明的目的是提供一种轴承喷涂方法,以解决现有技术中由于送粉管气流的作用导致喷涂点位存在较大误差,而影响轴承喷涂效果的问题。
本发明中的热喷涂喷枪轨迹校准方法采用如下技术方案:
热喷涂喷枪轨迹校准方法,包括以下步骤:
(1)在喷枪喷嘴处安装激光器,并将激光器发射口的中心线与喷枪喷嘴的中心线重合,以通过激光器发射的激光投射点模拟喷枪喷嘴的喷涂点;
(2)在平面上画一条轨迹线,然后平移机械手使激光器发射的激光投射点沿着这条轨迹线移动,并记录下机械手所移动的路径;
(3)拆下激光器,引弧点枪,机械手重复刚才所移动的路径,喷枪在平面上产生热喷涂涂层轨迹后停枪,此时,热喷涂涂层轨迹与轨迹线平行;
(4)重新安装激光器,使机械手再次重复刚才所移动的路径,同时正向调节激光投射点,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏距S或偏角α,之后再根据偏距S或偏角α反向调节激光投射点,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
有益效果是:采用本发明的热喷涂喷枪轨迹校准方法后,可有效的提高轨迹调试的精度和效率,避免了依靠增大喷涂区域来覆盖工件,造成粉末和气体的浪费,同时也不需要在工序中停枪进行检查涂层覆盖质量,可以得到高质量的涂层,也减少了设备的不必要损耗。
进一步地,在步骤(4)中,正向调节机械手的水平自由度,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏距S,之后再反向调节机械手的水平自由度,调整距离为2倍偏距S,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
有益效果是:一般夹持喷枪的机械手为六轴机械手,因此,机械手有六个自由度,通过调节机械手的水平自由度,使引弧点枪后的热喷涂涂层轨迹与轨迹线重合,调节较为方便。
进一步地,在步骤(4)中,正向调节机械手的旋转自由度,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏角α,之后再反向调节机械手的旋转自由度,调整角度为2倍偏角α,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
有益效果是:一般夹持喷枪的机械手为六轴机械手,因此,机械手有六个自由度,通过调节机械手的水平自由度,使引弧点枪后的热喷涂涂层轨迹与轨迹线重合,调节较为方便。
进一步地,在步骤(4)中,正向调节激光器的水平自由度,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏距S,之后再反向调节机械手的水平自由度,调整距离为偏距S,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
有益效果是:这样在反向调节机械手的水平自由度时,可以利用激光投射点与轨迹线重合,来确定引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
进一步地,在步骤(4)中,正向调节激光器的旋转自由度,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏角α,之后再反向调节机械手的旋转自由度,调整角度为偏角α,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
有益效果是:这样在反向调节机械手的旋转自由度时,可以利用激光投射点与轨迹线重合,来确定引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
本发明中的轴承喷涂方法采用如下技术方案:
轴承喷涂方法,对轴承的上端面俯喷、对轴承的内壁面或外周面平喷以及对轴承的下端面仰喷,在俯喷、平喷以及仰喷之前的热喷涂喷枪轨迹校准方法,包括以下步骤:
(1)在喷枪喷嘴处安装激光器,并将激光器发射口的中心线与喷枪喷嘴的中心线重合,以通过激光器发射的激光投射点模拟喷枪喷嘴的喷涂点;
(2)在平面上画一条轨迹线,然后平移机械手使激光器发射的激光投射点沿着这条轨迹线移动,并记录下机械手所移动的路径;
(3)拆下激光器,引弧点枪,机械手重复刚才所移动的路径,喷枪在平面上产生热喷涂涂层轨迹后停枪,此时,热喷涂涂层轨迹与轨迹线平行;
(4)重新安装激光器,使机械手再次重复刚才所移动的路径,同时正向调节激光投射点,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏距S或偏角α,之后再根据偏距S或偏角α反向调节激光投射点,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
有益效果是:采用本发明的热喷涂喷枪轨迹校准方法后,可有效的提高轨迹调试的精度和效率,避免了依靠增大喷涂区域来覆盖工件,造成粉末和气体的浪费,同时也不需要在工序中停枪进行检查涂层覆盖质量,可以得到高质量的涂层,也减少了设备的不必要损耗。
进一步地,在步骤(4)中,正向调节机械手的水平自由度,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏距S,之后再反向调节机械手的水平自由度,调整距离为2倍偏距S,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
有益效果是:一般夹持喷枪的机械手为六轴机械手,因此,机械手有六个自由度,通过调节机械手的水平自由度,使引弧点枪后的热喷涂涂层轨迹与轨迹线重合,调节较为方便。
进一步地,在步骤(4)中,正向调节机械手的旋转自由度,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏角α,之后再反向调节机械手的旋转自由度,调整角度为2倍偏角α,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
有益效果是:一般夹持喷枪的机械手为六轴机械手,因此,机械手有六个自由度,通过调节机械手的水平自由度,使引弧点枪后的热喷涂涂层轨迹与轨迹线重合,调节较为方便。
进一步地,在步骤(4)中,正向调节激光器的水平自由度,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏距S,之后再反向调节机械手的水平自由度,调整距离为偏距S,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
有益效果是:这样在反向调节机械手的水平自由度时,可以利用激光投射点与轨迹线重合,来确定引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
进一步地,在步骤(4)中,正向调节激光器的旋转自由度,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏角α,之后再反向调节机械手的旋转自由度,调整角度为偏角α,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
有益效果是:这样在反向调节机械手的旋转自由度时,可以利用激光投射点与轨迹线重合,来确定引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
上述各优选的技术方案可以单独采用,在能够组合的情况下也可以将两个以上方案任意组合,组合形成的技术方案此处不再具体描述,以此形式包含在本专利的记载中。
附图说明
图1是现有技术中未送粉时喷枪喷出火焰的结构示意图;
图2是现有技术中送粉后喷枪喷出火焰的结构示意图;
图3是现有技术中未送粉火焰与送粉后火焰的轴线示意图;
图4是图3中未送粉火焰和送粉后火焰的轨迹示意图;
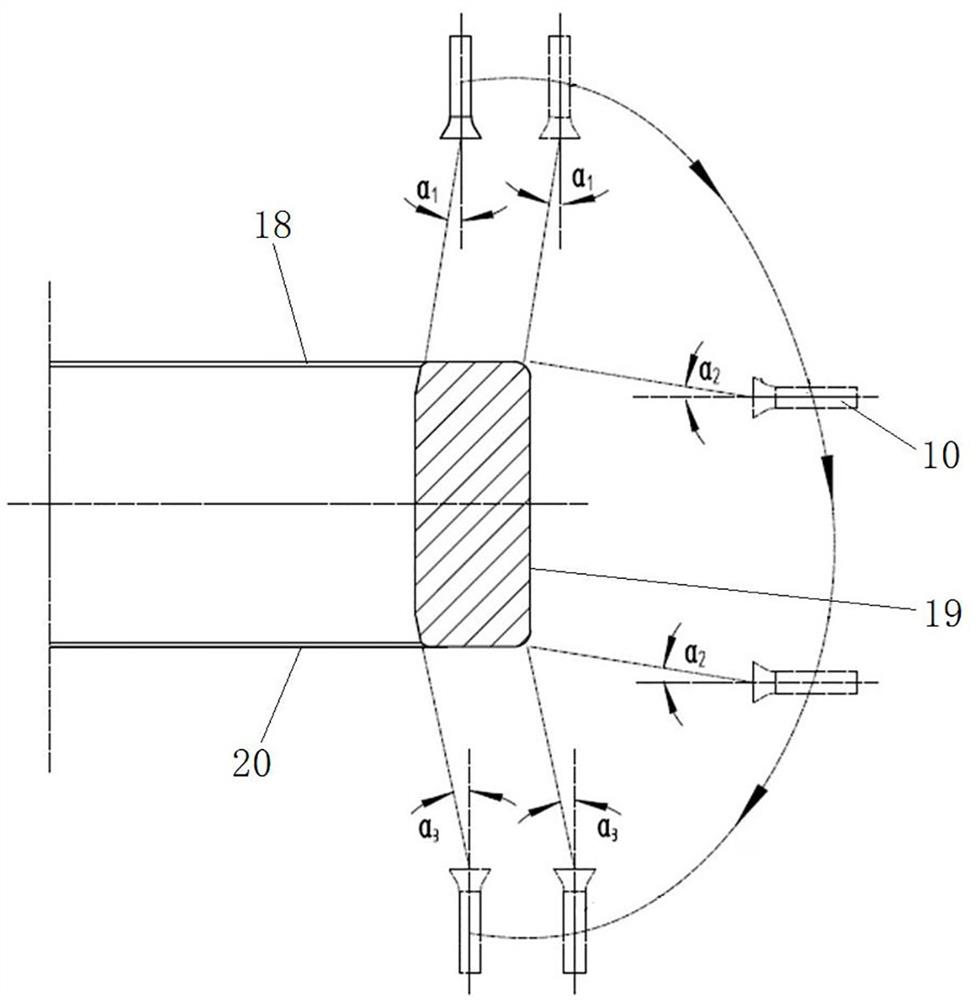
图5是本发明轴承喷涂方法的实施例1的结构示意图;
图中:10-喷枪;11-未送粉火焰;12-送粉后火焰;13-送粉管;14-送粉后火焰轴线;15-未送粉火焰轴线;16-送粉后火焰轨迹;17-未送粉火焰轨迹;18-上端面;19-外周面;20-下端面。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明,即所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,本发明的具体实施方式中可能出现的术语“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,可能出现的术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,可能出现的语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
在本发明的描述中,除非另有明确的规定和限定,可能出现的术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接连接,也可以是通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
在本发明的描述中,除非另有明确的规定和限定,可能出现的术语“设有”应做广义理解,例如,“设有”的对象可以是本体的一部分,也可以是与本体分体布置并连接在本体上,该连接可以是可拆连接,也可以是不可拆连接。对于本领域技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
以下结合实施例对本发明作进一步的详细描述。
本发明中轴承喷涂方法的实施例1:
如图5所示,依据氧化铝绝缘涂层用等离子热喷涂的特点,将喷涂时的喷枪姿态分解为俯喷、平喷和仰喷三种姿态。以轴承外圈为例,俯喷用于对轴承外圈的上端面18喷涂,平喷用于对轴承外圈的外周面19喷涂,仰喷用于对轴承外圈的下端面20喷涂。
在热喷涂过程的各项参数固定的情况下,如:粉末、喷枪功率、喷涂距离、喷枪移动速度、载气量等,确定不同喷枪姿态下的火焰偏角。将喷枪调整至一种姿态后,热喷涂喷枪轨迹校准方法如下:
(1)在喷枪喷嘴处固定安装激光器,并将激光器发射口的中心线与喷枪喷嘴的中心线重合,以通过激光器发射的激光投射点模拟喷枪喷嘴的喷涂点。
(2)选用一块钢板,在钢板的平面上画一条轨迹线,该轨迹线即为未送粉轨迹线,然后平移机械手使激光器发射的激光投射点沿着这条轨迹线移动,并记录下机械手所移动的路径;其中钢板的尺寸为300mm×300mm×5mm。
(3)拆下激光器,引弧点枪,以工艺要求的机械手平移速度移动喷枪,重复刚才所移动的路径,喷枪在平面上产生一定厚度的热喷涂涂层轨迹后停枪,该热喷涂涂层轨迹即为送粉后轨迹线,此时,热喷涂涂层轨迹与轨迹线平行。
(4)重新安装激光器,使机械手再次重复刚才所移动的路径,同时正向调节机械手的旋转自由度,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏角α,之后再反向调节机械手的旋转自由度,调整角度为2倍偏角α,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合,即送粉后火焰垂直平面喷涂。
如此,对喷枪不同姿态下、不同运动路径下送粉后火焰偏角进行测定,得出俯喷下测得的偏角α
在轴承外圈上端面、外周面以及下端面的喷枪轨迹点位确定后,进行喷枪整个轨迹的编程。试运行无干涉后进行喷涂,喷涂参数为:电压70~80V,电流500~600A,氩气流量55~60NLPM,氢气流量10~15NLPM,喷涂距离100~120mm,送粉量25~30g/min,喷涂线速度500~800mm/s。在喷涂时,轴承外圈绕自身轴线转动,喷枪10在图5中箭头指示的方向往复运动,以实现轴承外圈的喷涂。轴承内圈的喷涂同上。
本发明中轴承喷涂方法的实施例2:
本实施例与实施例1的不同之处在于,实施例1中,在步骤(4)中,重新安装激光器,使机械手再次重复刚才所移动的路径,同时正向调节机械手的旋转自由度,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏角α,之后再反向调节机械手的旋转自由度,调整角度为2倍偏角α,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合,即送粉后火焰垂直平面喷涂。而本实施例中,在重新安装激光器的基础上,使机械手再次重复刚才所移动的路径,同时正向调节机械手的水平自由度,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏距S,之后再反向调节机械手的水平自由度,调整距离为2倍偏距S,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
本发明中轴承喷涂方法的实施例3:
本实施例与实施例1的不同之处在于,实施例1中,在步骤(4)中重新安装激光器,使机械手再次重复刚才所移动的路径,同时正向调节机械手的旋转自由度,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏角α,之后再反向调节机械手的旋转自由度,调整角度为2倍偏角α,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合,即送粉后火焰垂直平面喷涂。而本实施例中,在重新安装激光器的基础上,使机械手再次重复刚才所移动的路径,同时正向调节激光器的水平自由度,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏距S,之后再反向调节机械手的水平自由度,调整距离为偏距S,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
本发明中轴承喷涂方法的实施例4:
本实施例与实施例1的不同之处在于,实施例1中,在步骤(4)中重新安装激光器,使机械手再次重复刚才所移动的路径,同时正向调节机械手的旋转自由度,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏角α,之后再反向调节机械手的旋转自由度,调整角度为2倍偏角α,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合,即送粉后火焰垂直平面喷涂。而本实施例中,在重新安装激光器的基础上,使机械手再次重复刚才所移动的路径,同时正向调节激光器的旋转自由度,使激光投射点和平面上的热喷涂涂层轨迹重合,并记录下激光投射点的偏角α,之后再反向调节机械手的旋转自由度,调整角度为偏角α,即可使引弧点枪后的热喷涂涂层轨迹与轨迹线重合。
本发明中的热喷涂喷枪轨迹校准方法的实施例:热喷涂喷枪轨迹校准方法的实施例即上述轴承喷涂方法的实施例1至4的任一实施例中记载的热喷涂喷枪轨迹校准方法,此处不再具体说明。
以上所述,仅为本申请的较佳实施例,并不用以限制本申请,本申请的专利保护范围以权利要求书为准,凡是运用本申请的说明书及附图内容所作的等同结构变化,同理均应包含在本申请的保护范围内。
- 热喷涂喷枪轨迹校准方法及轴承喷涂方法
- 等离子热喷涂设备喷枪电极同轴度校准器