机器人头颈结构和机器人
文献发布时间:2023-06-19 09:30:39
技术领域
本申请涉及机械设备领域,特别涉及一种机器人头颈结构和机器人。
背景技术
目前市场上机器人升降系统常用步进电机结合滚珠丝杆形式,常用RV电机结合谐波减速器的机械臂,结构造价昂贵,且载重极低。造成当今之机器人价格高昂、且不实用的普遍特点。
因此,亟需一种成本较低且实用性较强的机器人升降系统。
发明内容
本申请实施方式提供了一种机器人头颈结构和机器人,可以灵活调节高度。
本申请实施方式提供了一种机器人头颈结构,包括:升降臂结构,所述升降臂结构至少包括依次转动连接的上臂、中间连接臂和下臂;所述下臂下端连接于第一平台上端面;所述升降臂结构还包括有联动连杆,所述联动连杆下端转动连接于所述下臂下部,所述联动连杆的上端转动连接于所述上臂下端的凸出部;所述升降臂结构还包括驱动件,用于驱动所述中间连接臂绕所述中间连接臂与所述下臂的转轴旋转。
在一个实施方式中,所述驱动件为第一电动推杆,所述第一电动推杆的上端连接于所述中间连接臂中部。
在一个实施方式中,所述上臂下部为弯曲结构;该弯曲结构用于所述升降臂结构在完全折叠状态的情况下,所述上臂与所述中间连接臂侧面贴合。
在一个实施方式中,所述第一平台下端还连接有剪叉升降机构,所述剪叉升降机构包括至少一级X型剪叉结构;最下一级的所述X型剪叉机构下部的一端转动连接于第二平台,最下一级的所述X型剪叉机构下部的另一端与所述第二平台滑动连接;最上一级的所述X型剪叉机构上部的一端转动连接于所述第一平台,最上一级的所述X型剪叉机构上部的另一端与所述第一平台滑动连接;每级所述X型剪叉结构至少包括:一个X型剪叉单元,或,对应布置的两个以上的所述X型剪叉单元;所述X型剪叉单元为中间转动连接的X型升降单元。
在一个实施方式中,在所述X型剪叉结构级数为两级以上的情况下,相邻两个上下级的所述X型剪叉结构之间还包括阻尼杆;所述阻尼杆的两端分别垂直连接于相邻两个上下级的所述X型剪叉结构连接处的转轴中部。
在一个实施方式中,所述剪叉升降机构还包括有第二电动推杆;所述第二电动推杆用于控制所述剪叉升降机构升降;其中,所述第二电动推杆顶端连接于最下一级的所述X型剪叉机构的中间转轴;或,所述第二电动推杆顶端与所述第二平台的滑块相连,且所述第二电动推杆的伸缩方向对应于所述第二平台的滑轨方向。
在一个实施方式中,所述机器人头颈结构还包括俯仰关节,所述俯仰关节与所述上臂转动连接,由俯仰关节舵机控制转动角度;所述俯仰关节至少包括一个搭载面。
在一个实施方式中,以所述俯仰关节与所述上臂转动轴轴向方向为观察方向,所述俯仰关节包括第一边、第二边、第三边、第四边和圆弧边;其中,所述第一边与所述第二边成直角,所述第二边与所述第三边成直角,所述第三边与所述第四边成钝角,所述圆弧边与所述第一边相连;所述俯仰关节与所述上臂转动连接的转轴位于该圆弧边的对应的圆形处;所述搭载面为所述第二边对应的对应的端面。
在一个实施方式中,所述搭载面上搭载有旋转关节;所述旋转关节的转轴中心轴垂直所述搭载面,由旋转关节舵机控制转动角度。
在一个实施方式中,所述上臂与所述中间连接臂之间的转轴和所述中间连接臂与所述下臂之间的转轴为阻尼转轴。
本申请实施方式还提供了一种机器人,包括:底盘、如上述任意一项所述的机器人头颈结构。
在一个实施方式中,所述底盘为六轮仿生底盘;所述底盘上搭载有自平衡机构;所述自平衡机构上端搭载所述机器人头颈结构;所述自平衡机构用于平衡所述机器人的倾角。
在本申请实施方式中,提供了一种机器人头颈结构和机器人,包括所述升降臂结构,所述升降臂结构至少包括依次转动连接的上臂、中间连接臂和下臂;所述下臂下端连接于第一平台上端面;所述升降臂结构还包括有联动连杆,所述联动连杆下端转动连接于所述下臂下部,所述联动连杆的上端转动连接于所述上臂下端的凸出部;所述升降臂结构还包括驱动件,用于驱动所述中间连接臂绕所述中间连接臂与所述下臂的转轴旋转。本申请具有升降行程大,收缩状态体积小,占空间小;联动式升降臂结构,结构简单,成本低,加工工艺简单等优点。
附图说明
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
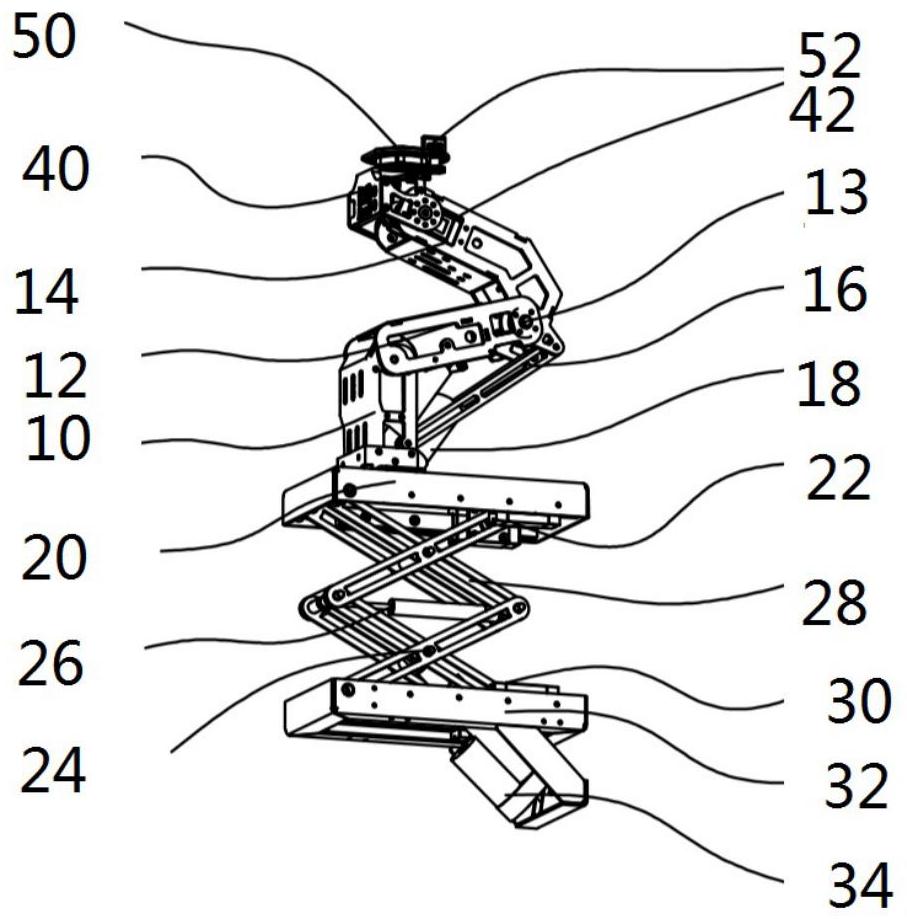
图1是本说明书实施方式的一个机器人头颈结构示意图;
图2是本说明书实施方式的一个机器人头颈结构升降示意图;
图3是本说明书实施方式的一个机器人头颈结构三视图;
图4是本说明书实施方式的一个阻尼杆结构示意图;
图5是本说明书实施方式的两种俯仰关节结构示意图;
图6是本说明书实施方式的一个机器人结构图;
图7是本说明书实施方式的一个机器人升降的主视图;
图8是本说明书实施方式的一个机器人俯视图;
图9是本说明书实施方式的一个机器人上下坡示意图;
附图说明:10、下臂,12、中间连接臂,13、上臂与中间连接臂之间的转轴,14、上臂,16、联动连杆,18、第一电动推杆,20、第一平台,22、第一平台上的滑轨,24、X型剪叉结构的转轴,26、阻尼杆,28、X型剪叉结构,30、第二平台上的滑轨,32、第二平台,34、第二电动推杆,40、俯仰关节,42、俯仰关节舵机,50、旋转关节50,52、旋转关节舵机,60、第一弹簧,62、套管,64、滑动挡片,66、第二弹簧,68、活塞杆,100、升降臂结构,200、剪叉升降机构,300、自平衡机构,400、六轮仿生底盘。
具体实施方式
为了使本技术领域的人员更好地理解本申请中的技术方案,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本申请保护的范围。
除非另有定义,本文所使用的所有的技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同。本文中在本申请的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本申请。
请参阅图1。本说明书实施方式提供了一种机器人头颈结构,可以包括:升降臂结构100,所述升降臂结构100至少包括依次转动连接的上臂14、中间连接臂12和下臂10;所述下臂10下端连接于第一平台20上端面;所述升降臂结构100还包括有联动连杆16,所述联动连杆16下端转动连接于所述下臂10下部,所述联动连杆16的上端转动连接于所述上臂14下端的凸出部;所述升降臂结构100还包括驱动件,用于驱动所述中间连接臂12绕所述中间连接臂12与所述下臂10的转轴旋转。
在本实施方式中,所述升降臂结构100可以是指起到升降功能的臂状连接机构,所述升降臂结构100的所述上臂14上端可以搭载其他装置,以对应具体作业。例如,所述上臂14上端搭载探照灯以照明,所述上臂14上端搭载抓手以抓取不同角度的物品,或所述上臂14上端搭载机器人头部结构以对应具体功能需求等。
在本实施方式中,所述升降臂结构100的主体结构可以由所述上臂14、所述中间连接臂12和所述下臂10依次转动连接组成。根据所述上臂14、所述中间连接臂12和所述下臂10之间转动连接的转动角度,所述升降臂结构100可以对应不同伸缩状态,以对应不同的升降高度。由缩到伸的状态可以是对应慢慢升高的状态,请参阅图2。
在本实施方式中,所述上臂14、所述中间连接臂12和所述下臂10可以是指按位置分类命名的所述升降臂结构100的三节臂状机构。所述上臂14的上端可用于连接其他机构,所述上臂14下端与所述中间连接臂12上端转动连接,所述中间连接臂12下端与所述下臂10上端转动连接,所述下臂10下端与所述第一平台20垂直连接。所述第一平台20用于支撑所述升降臂结构100。在本实施方式中,所述中间连接臂12下端与所述下臂10上端转动连接处还可以包括有转动连接卡口,以限制所述中间连接臂12与所述下臂10之间的转动角度。例如,请参阅图3三视图中的主视图,在所述下臂10上端设置有卡口以约束所述中间连接臂12主动的角度,所述卡口可以将所述中间连接臂12与所述下臂10之间的角度变化范围限制在90°至180°之间。
在本实施方式中,所述上臂14下部还具有所述凸出部。所述凸出部用于与所述联动连杆16转动连接。所述凸出部可以是凸出的三角形结构,也可以是凸出矩形结构或梯形结构或不规则形结构等。所述凸出部用于稳定所述上臂14。具体的,所述上臂14的下端与所述中间连接臂12的上端转动连接,所述上臂14下部的所述突出部与所述联动连杆16转动连接,共同作用以稳定所述上臂14。在所述中间连接臂12绕所述中间连接臂12与所述下臂10的转轴逆时针转动时,所述上臂14在该凸出部和所述上臂14与所述中间连接臂12转轴的共同作用下,所述上臂14可以绕所述上臂14与所述中介连接臂的转轴顺时针转动,以折叠起该升降臂结构100。同理,在所述中间连接臂12绕所述中间连接臂12与所述下臂10的转轴顺时针转动时,所述上臂14在该凸出部和所述上臂14与所述中间连接臂12转轴的共同作用下,所述上臂14可以绕所述上臂14与所述中介连接臂的转轴逆时针转动,以展开该升降臂结构100。在本实施方式中,所述上臂14的下部可以是弯曲结构,以在折叠起该升降臂结构100时,折叠面对应的所述上臂14的侧面和所述中间连接臂12的侧面可以贴合。
在本实施方式中,所述升降臂结构100还可以包括驱动件,用于驱动所述中间连接臂12绕所述中间连接臂12与所述下臂10的转轴旋转。具体的,所述驱动件可以是电动推杆,或液压推杆。在一个实施场景中,所述驱动件为电动推杆,该电动推杆的下端连接于所述下臂10的下端,或连接于所述第一平台20。该电动推杆的上端连接于所述中间连接臂12的中部。如,所述中间连接臂12的中部可以设置有一横杆,该横杆与该电动推杆上端转动连接,该电动推杆在伸长时,所述中间连接臂12绕所述中间连接臂12与所述下臂10之间的转轴顺时针转动;反之,该电动推杆在收缩时,所述中间连接臂12绕所述中间连接臂12与所述下臂10之间的转轴逆时针转动。所述驱动件还可以是电机,该电机可以直接驱动所述中间连接臂12与所述下臂10之间的转轴转动,在该电机正转或反正时,该转轴对应正转或者反转,以带动所述中间连接臂12绕所述中间连接臂12与所述下臂10之间的转轴对应顺时针或逆时针转动。
在本实施方式中,所述联动连杆16可以是一个固定长的连杆,用于联动所述上臂14和所述中间臂。
在本实施方式中,所述下臂10与所述第一平台20可以是垂直固定连接。所述下臂10与所述第一平台20的连接还可以是以所述下臂10的轴心线为旋转中心的转动连接。例如,所述下臂10垂直固定连接在所述第一平台20的上端设置的一个自转平台上;该自转平台可以通过电机控制自转角度;或,所述下臂10与在所述第一平台20的一垂直杆配合,配合完成时,该垂直杆的轴心线与所述下臂10的轴心线重合,该垂直杆可以由电机控制自转角度,以带动所述下臂10的周向转动。
在本实施方式中,所述机器人头颈结构至少包括所述升降臂结构100。所述升降臂结构100通过依次转动连接的所述上臂14、所述中间连接臂12和所述下臂10;并通过所述联动连杆16与所述上臂14的凸出部的共同作用,使得该升降臂结构100可以具有折叠功能以实现升降的作用。本实施方式提供的机器人头颈结构控制简单,还可以利用阻尼弹簧和阻尼转轴的作用消除运动间隙,折叠式结构占空间小,联动式升降臂结构100,结构简单,成本低,加工工艺简单,负重大。在一个实施场景中,可以用500N的推杆举升25kg的物体。
在一个优选的实施方式中,所述驱动件为第一电动推杆18,所述第一电动推杆18的上端连接于所述中间连接臂12中部。
在本实施方式中,所述中间连接臂12中部可以是指所述中间连接臂12中间位置或附近。具体的,例如,所述中间连接臂12中部可以设置有一个横杆,也可以有不同高度位置的两个以上横杆。所述第一电动推杆18的上端套设于所述横杆并可以以该横杆轴心线为转动中心转动。所述中间连接臂12中部可以设置其他转动连接件,如耳环等,此处不做具体限定。
本实施方式通过电动推杆作为所述驱动件,用于驱动所述中间连接臂12绕所述中间连接臂12与所述下臂10的转轴旋转。结构简单,推力大。
在一个优选的实施方式中,所述上臂14下部为弯曲结构;该弯曲结构用于所述升降臂结构100在完全折叠状态的情况下,所述上臂14与所述中间连接臂12侧面贴合。
在本实施方式中,所述完全折叠状态可以是指所述升降臂结构100处于极限紧缩的状态,即该升降臂结构100上端为最低点。在该状态时,所述中间连接臂12和所述下臂10所成角度最小,在所述上臂14下端的凸出部和所述联动连杆16的作用下,所述上臂14折叠收起。在该弯曲结构的作用下,所述上臂14侧面的直线部分可以与所述中间连接臂12的侧面贴合。
在本实施方式中,所述弯曲结构的弯曲结构的弯曲方向与所述上臂14与所述中间连接臂12的折叠方向对应。所述上臂14可以是下部为弯曲结构,上部为笔直结构。在一个优选的实施方式中,所述弯曲结构的弯曲角度为90°。在该实施方式中,在所述中间连接臂12与所述下臂10成90°时,所述上臂14侧面的直线部分可以与所述中间连接臂12的侧面贴合。
本实施方式中,通过所述上臂14下部的弯曲结构,更加稳定结构,可以使所述升降臂结构100在完全折叠状态时所述上臂14上端位置处于相对较低的位置,以增加所述升降臂结构100的升降范围,提高适用性。
在一个优选的实施方式中,所述第一平台20下端还连接有剪叉升降机构200,所述剪叉升降机构200包括至少一级X型剪叉结构28;最下一级的所述X型剪叉机构下部的一端转动连接于第二平台32,最下一级的所述X型剪叉机构下部的另一端与所述第二平台32滑动连接;最上一级的所述X型剪叉机构上部的一端转动连接于所述第一平台20,最上一级的所述X型剪叉机构上部的另一端与所述第一平台20滑动连接;每级所述X型剪叉结构28至少包括:一个X型剪叉单元,或,对应布置的两个以上的所述X型剪叉单元;所述X型剪叉单元为中间转动连接的X型升降单元。
在本实施方式中,所述滑动连接可以是通过滑块与滑轨滑动连接。
在本实施方式中,所述第一平台20可以是所述剪叉升降机构200的剪叉机构上座。所述第一平台20可以设置有至少一条平行滑轨,每条滑轨上各设置有一个滑块。在平行滑轨有两条以上时,两条以上的滑轨可以是以所述第一平台20的中心线对称。
在本实施方式中,每级所述X型剪叉结构28可以至少包括:一个X型剪叉单元,或,对应布置的两个以上的所述X型剪叉单元;所述X型剪叉单元为中间转动连接的X型升降单元。每级所述X型剪叉结构28具有的所述X型剪叉单元的单元数与所述第一平台20的滑轨条数对应。
在本实施方式中,所述X型剪叉单元可以是两根转动连接与中间部位的直杆组成。每级所述X型剪叉结构28也可以是对应布置的两个以上的所述X型剪叉单元。在所述X型剪叉单元为多个时,所述X型剪叉单元中间转动连接部位的转轴可以是共用一个转轴,中间转动连接部位的转轴也可以是阻尼转轴。在一个优选的实施方式中,所述每级所述X型剪叉结构28包括两个所述X型剪叉单元。
在本实施方式中,所述剪叉升降机构200可以包括至少一级所述X型剪叉结构28。所述剪叉升降机构200包括两级以上所述X型剪叉结构28时,上下相邻的两级所述X型剪叉结构28在连接处转动连接。具体的,例如,位于上方的一级所述X型剪叉结构28“X”型下端与位于下方的一级所述X型剪叉结构28“X”型上端转动连接;其中转动连接的两端,可以是共用转轴,也可以是在对应处,各自转动连接。在一个实施场景中,每级所述X型剪叉结构28有2个所述X型剪叉单元,上一级的2个所述X型剪叉单元下端4个部位与下一级的2个所述X型剪叉单元上端4个部位对应转动连接;其中,位于一侧的连接处可以共用一个转轴。
在本实施方式中,最下一级的所述X型剪叉机构下部的一端转动连接于第二平台32,最下一级的所述X型剪叉机构下部的另一端与所述第二平台32滑动连接;最上一级的所述X型剪叉机构上部的一端转动连接于所述第一平台20,最上一级的所述X型剪叉机构上部的另一端与所述第一平台20滑动连接。具体的,所述X型剪叉机构每级的所述X型剪叉单元对应布置,每级的所述X型剪叉单元也与所述第一平台20以及所述第二平台32上的滑轨对应布置。最上一级所述X型剪叉机构上端一侧与所述第一平台20转动连接,例如铰接。以此,该侧连接处于所述第一平台20不会发生位移。另一侧分别连接于对应滑轨上的滑块。同理,最下一级所述X型剪叉机构下端一侧与所述第二平台32转动连接,另一侧分别连接于所述第二平台32上的对应滑轨上的滑块。以此实现剪叉式升降功能。升降范围大。
在本实施方式中,所述第二平台32可以是所述剪叉升降机构200底座,用于支撑所述剪叉升降机构200。
在本实施方式中,所述剪叉升降机构200升降驱动力可以作用于最下一级所述X型剪叉结构28,也可以作用于所述第二平台32的滑块,此处不做具体限定。例如,最下一级所述X型剪叉结构28可以包括两个对应的所述X型剪叉单元,所述X型剪叉单元中间转轴共用,所述剪叉升降机构200升降驱动件可以是第二电动推杆34,推杆的顶端垂直连接于该共用的转轴中部,该推杆相对于第二平台32的滑轨成一定角度布置,通过推杆的伸缩可以控制所述剪叉升降机构200的升降。再例如,每级所述X型剪叉结构28可以包括两个对应的所述X型剪叉单元,对应的,在所述第二平台32上有两条对应滑轨与两个滑块,两个滑块直接可以有直杆连接,所述剪叉升降机构200升降驱动可以是第二电动推杆34,该推杆的顶端可以垂直连接于该直杆中部,以使该推杆的伸缩方向与滑块在滑轨上的移动方向一致。优选的,所述剪叉升降机构200升降驱动为推杆,每级所述X型剪叉结构28包括两个所述X型剪叉单元,且每级所述X型剪叉结构28的两个所述X型剪叉单元中间转轴共用,所述剪叉升降机构200升降的驱动件为第二电动推杆34,该推杆顶端垂直连接于最下一级的所述X型剪叉结构28的中间共用的转轴。
本实施方式通过结合所述剪叉升降机构200,扩大所述机器人头颈结构的升降范围,成本低,结构简单,适用性强。
在一个优选的实施方式中,在所述X型剪叉结构28级数为两级以上的情况下,相邻两个上下级的所述X型剪叉结构28之间还包括阻尼杆26;所述阻尼杆26的两端分别垂直连接于相邻两个上下级的所述X型剪叉结构28连接处的转轴中部。
在本实施方式中,相邻两个上下级的所述X型剪叉结构28两侧的连接处,每侧共用转轴,分别对应两根平行的共用连接转轴,两根平行的共用连接转轴可以通过所述阻尼杆26垂直连接。在本实施方式中,所述阻尼杆26可以是指通过阻尼作用消除运动间隙的连杆。请参阅图4。所述阻尼杆26可以包括套管62,所述套管62的一端固定密封,另一端设置有小孔供活塞杆68穿过;该套管62内第一弹簧60的一端固定于套管62的固定密封处,所述第一弹簧60的另一端与所述活塞杆68固定连连接;所述套管62内中部位置还设置有滑动挡片64,所述活塞杆68在对应位置处设置有轴向的凸起,以限制所述活塞杆68在所述套管62唯一,在该滑动挡片64与该凸起接触时,所述活塞杆68伸出所述套管62的伸出部最短,该阻尼杆26处于最短状态。所述套管62还包括第二弹簧66,所述第二弹簧66与所述第一弹簧60分别位于所述滑动挡片64的两侧,所述第二弹簧66套设于所述活塞杆68,在所述活塞杆68上的凸起向所述第二弹簧66的方向位移时,所述第二弹簧66可以提供阻尼力。
本实施方式中,通过加装阻尼杆26,提供阻尼力,可以使所述剪叉升降机构200升降更加平稳。
在一个优选的实施方式中,所述剪叉升降机构200还包括有第二电动推杆34;所述第二电动推杆34用于控制所述剪叉升降机构200升降;其中,所述第二电动推杆34顶端连接于最下一级的所述X型剪叉机构的中间转轴;或,所述第二电动推杆34顶端与所述第二平台32的滑块相连,且所述第二电动推杆34的伸缩方向对应于所述第二平台32的滑轨方向。
在本实施方式中,所述剪叉升降机构200升降驱动件可以是所述第二电动推杆34,该推杆的顶端可以垂直连接于该共用的转轴中部,所述第二电动推杆34的下端可以连接于所述第二平台32,也可以是固定于其他装置。该推杆可以相对于第二平台32的滑轨成一定角度布置,通过推杆的伸缩可以控制所述剪叉升降机构200的升降。
在本实施方式中,所述第二电动推杆34顶端可以与所述第二平台32的滑块相连,且所述第二电动推杆34的伸缩方向对应于所述第二平台32的滑轨方向。所述第二电动推杆34的伸缩运动与所述第二平台32上的滑块位移运动同步。具体的,例如,所述第二电动推杆34可以是有一个以上,以对应所述第二平台32上的滑块,两者一一对应,同步运动。再例如,所述第二电动推杆34个数为1个,滑块个数为一个以上,在所述滑块个数在两个以上时,滑块直接可以有直杆连接,该直杆垂直于每个所述滑轨,该推杆的顶端可以垂直连接于该直杆中部,以实现所述第二推杆与所述滑块同步运动。
本实施方式通过所述第二电动推杆34提供所述剪叉升降机构200升降驱动力,结构简单,成本低,动力足。
在一个优选的实施方式中,所述机器人头颈结构还可以包括俯仰关节40,所述俯仰关节40与所述上臂14转动连接,由俯仰关节舵机42控制转动角度;所述俯仰关节40至少包括一个搭载面。
在本实施方式中,所述俯仰关节40用于调整其搭载面上搭载的装置与所述上臂14的俯仰角。所述搭载面用于搭载旋转关节50等,以适用于具体作业环境。请参阅图5,所述搭载面可以是有一个,也可以是有两个以上,此处不做具体限定。
在本实施方式中,所述俯仰关节40与所述上臂14通过转轴转动连接。该转轴的转动角度通过所述俯仰关节舵机42控制,当该转轴处于不同的角度是,所述搭载面相对于所述上臂14的俯仰角不同。在本实施方式中,所述上臂14上端还可以包括有卡扣,以控制所述俯仰关节40绕所述上臂14的转动角度。
本实施方式通过所述俯仰关节40可以调整其上装置的俯仰角,以提高所述机器人头颈结构的适用性。
在一个优选的实施方式中,以所述俯仰关节40与所述上臂14转动轴轴向方向为观察方向,所述俯仰关节40包括第一边、第二边、第三边、第四边和圆弧边;其中,所述第一边与所述第二边成直角,所述第二边与所述第三边成直角,所述第三边与所述第四边成钝角,所述圆弧边与所述第一边相连;所述俯仰关节40与所述上臂14转动连接的转轴位于该圆弧边的对应的圆形处;所述搭载面为所述第二边对应的对应的端面。
请参阅图5中左侧示意图。所述俯仰关节40可以侧面视图可以近似为直角梯形,该直角梯形的锐角处使用圆弧过度,对应所述圆弧边,以方便设置所述俯仰关节40与所述上臂14转动连接的转轴,该转轴可以设置于该圆弧的圆心处。
在本实施方式中,所述圆弧边可以与所述第四边相切,所述圆弧边也可以是半圆边。此处不做具体限定。
本实施方式提供的所述俯仰关节40结构简单,使用方便。
在一个优选的实施方式中,所述搭载面上搭载有旋转关节50;所述旋转关节50的转轴中心轴垂直所述搭载面,由旋转关节舵机52控制转动角度。
在本实施方式中,所述旋转关节50可以是指以旋转轴为旋转中心的自转机构,该旋转轴垂直于所述搭载面,该旋转轴的转动角度可以由所述旋转关节舵机52控制。具体的,例如,所述旋转关节50与摄像头配合安装,摄像头的拍摄方向与所述旋转轴的转动角度同步,通过所述旋转关节舵机52控制。
在本实施方式中,所述旋转关节50可以搭载各类监测设备,如摄像头、温度传感器、气体传感器等,可以满足各类监测需求。
在本实施方式中,通过所述旋转关节50,可以完成各姿态调整,进一步提高所述机器人头颈结构的适用性。
在一个优选的实施方式中,所述上臂14与所述中间连接臂12之间的转轴和所述中间连接臂12与所述下臂10之间的转轴为阻尼转轴。
在本实施方式中,所述阻尼转轴可以是指转动时可以提供阻尼力以缓冲的转轴。所述阻尼转轴可以消除运动间隙,使转动更加平稳。
本说明书实施方式提供了一种机器人,可以包括:底盘、如上述所述的任意一项所述机器人头颈结构。
请参阅图6至图9。在本实施方式中,所述机器人头颈结构可以设置于底盘上,以在进行室内外移动,所述机器人头颈结构可以自由调节机器人的高度或角度等,还可以搭载各类监测设备,如摄像头、温度传感器、气体传感器等以满足对应的工作需求。
在本实施方式中,仅针对与前述实施方式不同之处进行了描述,其它内容可以对照前述实施方式的内容解释,在此不再赘述。
在一个优选的实施方式中,所述底盘为六轮仿生底盘400;所述底盘上搭载有自平衡机构300;所述自平衡机构300上端搭载所述机器人头颈结构;所述自平衡机构300用于平衡所述机器人的倾角。
在本实施方式中,所述六轮仿生底盘400可以是指利用仿生学技术的六轮底盘,适用性较强,可以平稳的在石子路、土路等凹凸不平的地面行驶,可以平稳的越过减速带、垂直障碍物等障碍等。
在本实施方式中,所述自平衡机构300用于平衡所述机器人的倾角,调整机器人的重心位置,保证机器人在通过斜坡或障碍物时不会倾覆。
在本实施方式中,仅针对与前述实施方式不同之处进行了描述,其它内容可以对照前述实施方式的内容解释,在此不再赘述。
需要说明的是,在本申请的描述中,术语“第一”、“第二”等仅用于描述目的和区别类似的对象,两者之间并不存在先后顺序,也不能理解为指示或暗示相对重要性。此外,在本申请的描述中,除非另有说明,“多个”的含义是两个或两个以上。
应该理解,以上描述是为了进行图示说明而不是为了进行限制。通过阅读上述描述,在所提供的示例之外的许多实施方式和许多应用对本领域技术人员来说都将是显而易见的。因此,本教导的范围不应该参照上述描述来确定,而是应该参照前述权利要求以及这些权利要求所拥有的等价物的全部范围来确定。出于全面之目的,所有文章和参考包括专利申请和公告的公开都通过参考结合在本文中。在前述权利要求中省略这里公开的主题的任何方面并不是为了放弃该主体内容,也不应该认为申请人没有将该主题考虑为所公开的申请主题的一部分。
- 机器人头颈结构和机器人
- 一种机器人头颈组件和机器人