自动接触式多点供电机构
文献发布时间:2023-06-19 09:30:39
技术领域
本发明实施例涉及供电结构技术领域,具体涉及自动接触式多点供电机构。
背景技术
现有技术对机构等供电多采用固定接线的方式,此方式虽安全可靠,但如果机构要求经常移动,那线路的布置就是很大的问题。所以要解决在某一个或多个点特定位置可以为机构供电,这就需要使用触点。
触点的使用需要平移升降等动作,触点平移升降结构会占用大量空间。在真空或者较窄小工作环境下,为移动机构单点或多点供电,需要在较小的空间下实现,本发明可以很好地解决触点平移供电问题。并且节省空间,减少了占地面积,结构简单,运动可靠。
发明内容
为此,本发明实施例提供一种自动接触式多点供电机构,以解决现有技术中由于触点平移升降结构会占用大量空间而导致的较难在真空或者较窄小工作环境下,为移动机构单点或多点供电的问题。
为了实现上述目的,本发明实施例提供如下技术方案:
自动接触式多点供电机构,包括底板、固定安装在底板上的导向组件、安装在底板和导向组件上的连杆组件以及连接在导向组件上的触点组件,所述导向组件包括两固定安装在底板上滑轨,两所述滑轨相对设置且与底板垂直设置,两所述滑轨上分别滑动连接有滑块,两所述滑块上分别固定连接有滑块连接板,所述滑块连接板通过转动轴转动连接有连杆连接块,两所述连杆连接块的一侧分别铰接有铰链一,两所述铰链一位于两连杆连接块的不同侧,所述触点组件包括触点竖板和固定安装在触点竖板上的若干触点,所述触点竖板与两连杆连接块固定连接,所述底板上固定安装有与铰链一对应设置的铰链座,两所述铰链座上铰接有铰链二,对应的所述铰链一和铰链二铰接且铰接位置还铰接有位于底板和触点竖板之间的驱动连杆,所述底板上转动连接有穿入底板的驱动杆,所述驱动杆靠近触点竖板的一端固定连接有与驱动杆垂直的摆动杆,两所述驱动连杆分别与铰接在摆动杆的两端。
本发明实施例的特征还在于,所述触点竖板上开有与滑轨、滑块、滑块连接板的两处让位孔。
本发明实施例的特征还在于,两所述滑块连接板固定设置在两滑块互相靠近的一端。
本发明实施例的特征还在于,所述驱动连杆的两端分别通过鱼眼轴承铰接。
本发明实施例的特征还在于,所述滑块连接板为具有两处缺口的H型块,所述连杆连接块为U型且插入滑块连接板的两处缺口处,所述滑块连接板与转动轴连接处为腰型孔且滑块连接板与滑块具有间距。
本发明实施例的特征还在于,所述触点竖板的两侧通过螺丝分别固定安装有触点压板,所述触点为圆柱状,所述触点竖板和触点压板上分别开有与触点匹配的半圆弧型的凹槽,所述触点压合在触点竖板和触点压板之间。
本发明实施例的特征还在于,所述触点远离底板的一端外侧螺纹连接有触点护套。
本发明实施例的特征还在于,所述触点护套的外侧固定连接有喇叭状包在触点外侧的柔性的保护端子。
本发明实施例的特征还在于,所述底板靠近触点竖板一侧的周边具有环形的O型槽,所述O型槽内安装有O型密封圈。
本发明实施例具有如下优点:
1、通过合理的连杆结构以及鱼眼轴承的应用,保证了触点组件平移的实现,驱动连杆伸出时铰链一和铰链二水平,应用死点原理保证压紧;
2、通过开槽和结构位置的合理布局,并且节省空间,减少了占地面积,结构简单,运动可靠。
附图说明
为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。
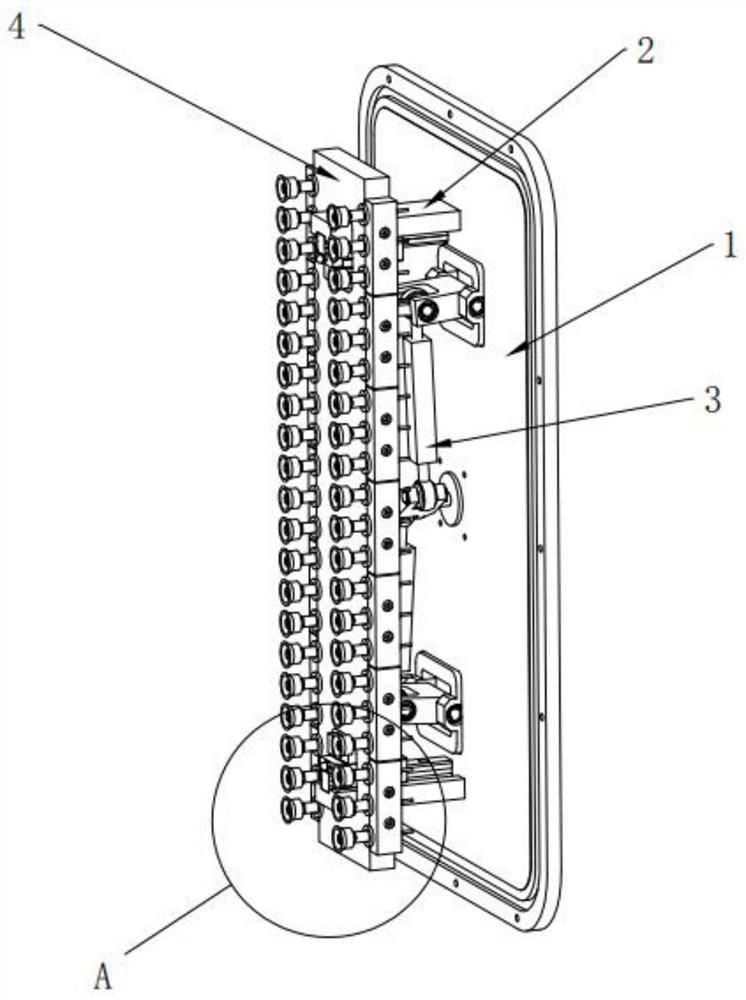
图1为本发明实施例提供的自动接触式多点供电机构的整体立体结构示意图;
图2为本发明实施例提供的自动接触式多点供电机构的底板的结构立体图;
图3为本发明实施例提供的自动接触式多点供电机构的底板的背面正视图;
图4为本发明实施例提供的自动接触式多点供电机构的导向组件的结构示意图;
图5为本发明实施例提供的连杆组件的伸出状态侧视示意图;
图6为本发明实施例提供的连杆组件的缩回状态侧视示意图;
图7为图1中A处的放大图。
图中:1、底板;11、铰链座;12、O型槽;2、导向组件;21、滑轨;22、滑块;23、滑块连接板;24、连杆连接块;241、腰型孔;3、连杆组件;31、铰链一;32、铰链二;33、驱动连杆;34、驱动杆;35、摆动杆;36、鱼眼轴承;4、触点组件;41、触点竖板;411、让位孔;42、触点;43、触点压板;44、触点护套;45、保护端子。
具体实施方式
以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
结合图1-7,自动接触式多点供电机构,包括底板1、固定安装在底板1上的导向组件2、安装在底板1和导向组件2上的连杆组件3以及连接在导向组件2上的触点组件4,导向组件2包括两固定安装在底板1上滑轨21,两滑轨21的滑道相对设置且与底板1垂直设置,两滑轨21上分别滑动连接有滑块22,两滑块22上分别固定连接有滑块连接板23,滑块连接板23通过转动轴转动连接有连杆连接块24,两连杆连接块24的一侧分别铰接有铰链一31,两铰链一31位于两连杆连接块24的不同侧,触点组件4包括触点竖板41和固定安装在触点竖板41上的若干触点42,触点竖板41与两连杆连接块24固定连接,底板1上固定安装有与铰链一31对应设置的铰链座11,铰链座11可以焊接在底板1上,两铰链座11上铰接有铰链二32,对应的铰链一31和铰链二32铰接且铰接位置还铰接有位于底板1和触点竖板41之间的驱动连杆33,底板1上转动连接有穿入底板1的驱动杆34,驱动杆34靠近触点竖板41的一端固定连接有与驱动杆34垂直的摆动杆35,两驱动连杆33分别与铰接在摆动杆35的两端。
底板1用于固定安装在箱体上,触点组件4通过滑轨21和滑块22能够相对于底板1进行平移滑动,电机驱动驱动杆34转动后,带动摆动杆35摆动,摆动杆35带动驱动连杆33上下运动,由于铰链座11固定,能够带动铰链一31和铰链二32开合,铰链二32与铰链座11连接无法移动,因此铰链一31推动滑块22以及触点组件4相对底板1平移滑动,通过合理的连杆结构保证了触点组件4平移的实现,并且节省空间。
触点竖板41上开有与滑轨21、滑块22、滑块连接板23的两处让位孔411,避空滑轨21滑块22,充分节省空间,减少了占地面积,结构简单,运动可靠。
两滑块连接板23固定设置在两滑块22互相靠近的一端,结构位置合理,空间占用较小。
驱动连杆33的两端分别通过鱼眼轴承36铰接,通过鱼眼轴承36,调整为驱动连杆33伸出时铰链一31和铰链二32水平,在鱼眼轴承36的限制下无法继续运动,应用死点原理保证压紧。
滑块连接板23为具有两处缺口的H型块,连杆连接块24为U型且插入滑块连接板23的两处缺口处,滑块连接板23和连杆连接块24通过转动轴连接,滑块连接板23与转动轴连接处为腰型孔241且滑块连接板23与滑块22具有间距。
触点竖板41的两侧通过螺丝分别固定安装有触点压板43,触点42为圆柱状,触点竖板41和触点压板43上分别开有与触点42匹配的半圆弧型的凹槽,触点42压合在触点竖板41和触点压板43之间,拆装方便。
触点42远离底板1的一端外侧螺纹连接有触点护套44,使得触点42的防护性能较好。触点护套44的外侧固定连接有喇叭状包在触点42外侧的柔性的保护端子45,进一步保证触点42的安全。
底板1靠近触点竖板41一侧的周边具有环形的O型槽12,O型槽12内安装有O型密封圈,用于将本机构安装在需要密封的箱体上,O型密封圈处还开有螺纹孔,用于固定于箱体上,驱动杆34通过磁流体轴承密封安装在底板1上。
虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
- 自动接触式多点供电机构
- 一种多点接触式自动调整拔纱管机构