一种基于点云的警冲标平面位置测量方法
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及三维激光铁路测量技术领域,尤其是一种基于点云的警冲标平面位置测量方法。
背景技术
随着我国铁路网发展越来越迅速,铁路线路网越来越复杂,因此在线路改造以及新线设计的过程中,对既有车站中的一些地物及地形测量是必要的。警冲标作为保证线路行车安全的信号标识之一,因此警冲标位置的确定对于线路改造以及新线线路设计都是重要的。
传统的警冲标平面位置测量是通过GPS-RTK的方法进行测量,在测量过程中,对中杆在警冲标贴边进行位置采集,因此其方法采集的平面位置与实际位置偏差较大。随着测量技术的提升,测量由之前的点测量形式转变为面测向形式。在既有线作业应用中,三维激光扫描技术应用较多,解决了在有限的天窗时间内,获取大量线上测量数据难的问题。三维激光扫描获取的点云数据为离散的点云,因此需要对其进行处理后获取到需要的测量数据。
申请号201511029127.7发明中提到一种柱状物体的点云提取方法及装置,该发明通过对片点云进行分析,从而得到柱状物的各个片点云与其他物体的粘连情况,达到识别出与其他物体粘连柱状物的效果,但该方法无法对提取的柱状物进行位置确定。
申请号201811329207.8发明中提到了一种基于单线激光雷达识别柱状物的机器人室内自定位系统,该提取柱状物信息后利用柱状物特征与柱状物离线地图的匹配进行自定位。该方法定位精度受匹配精度的影响较大。
发明内容
本发明的目的是根据上述现有技术的不足,提供了一种基于点云的警冲标平面位置测量方法,通过对点云数据进行处理配合RANSAC算法及选权迭代法,实警冲标平面坐标的提取。
本发明目的实现由以下技术方案完成:
一种基于点云的警冲标平面位置测量方法,其特征在于:所述测量方法包括以下步骤:
S1、依据获取的区域点云数据进行滤波,获取地面点与非地面点;
S2、依据测区大小建立平面格网模型,取所述平面格网模型内的地面点的高程的均值作为格网的高程基准,并沿所述格网的高程基准垂直向上建立一定距离的缓冲区并获取缓冲区内点云;
S3、采用RANSAC算法及选权迭代法对警冲标点云进行提取并进行投影后坐标拟合,从而获得所述警冲标的平面位置坐标。
所述缓冲区内点云的获取是指,在所述格网的高程基准的垂直方向上获取20-30厘米处缓冲区内的点云数据,其中包括了所述警冲标的表面点云距离地面约20-30厘米处的点云数据,依次对所有网格内的点云进行提取。
采用RANSAC算法及选权迭代法对警冲标点云进行提取并进行投影后坐标拟合是指,采用RANSAC算法对所获取的缓冲区内点云进行提取,将所述警冲标的表面点云提取出来;利用所提取的警冲标表面点云投影至地面上,采用选权迭代最小二乘拟合圆的方法对投影后的警冲标表面点云进行拟合其圆心坐标,所述圆心坐标即为所述警冲标的平面位置。
本发明的优点是:通用性好,能够适用于不同尺寸型号的警冲标平面位置提取;精度高,通过选权迭代最小二乘法的拟合方法对处理后的点云数据进行拟合,有效的避免了表面点云提取过程中粗差点对拟合结果的影响,提高拟合精度。
附图说明
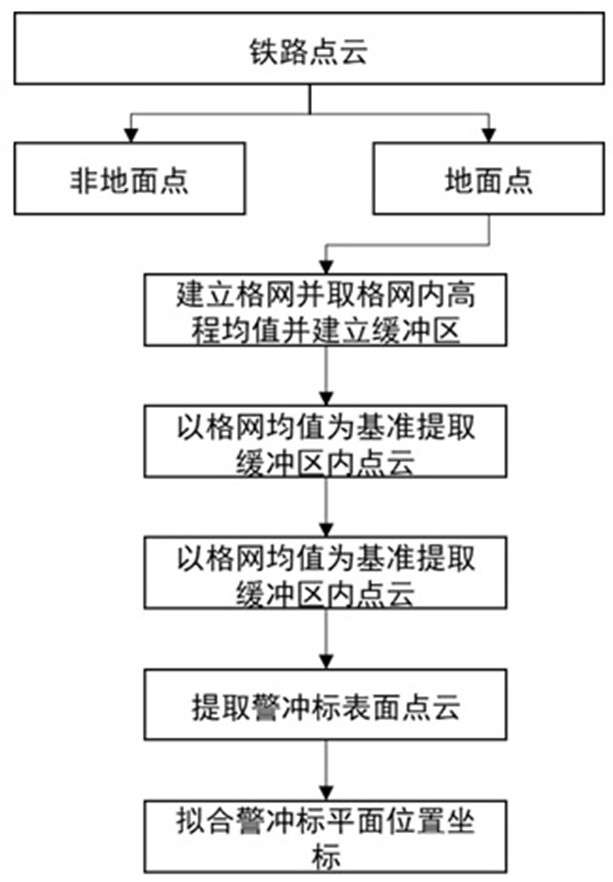
图1为本发明的测量方法流程图;
图2为本发明中警冲标提取格网示意图;
图3为本发明中警冲标提取建立的缓冲区示意图。
具体实施方式
以下结合附图通过实施例对本发明特征及其它相关特征作进一步详细说明,以便于同行业技术人员的理解:
如图1-3所示,图中标记1-4分别表示为:格网1、警冲标2、地面3、缓冲区4。
实施例:如图1所示,本实施例中的基于点云的警冲标平面位置测量方法包括以下步骤:
S1:依据获取的铁路区域点云数据进行滤波,采用合适的点云滤波算法获取铁路区域的地面点云与非点面点云。该铁路区域点云数据是指包含了警冲标的铁路区域的点云数据。
S2:依据铁路区域的大小建立平面格网,如图2所示,铁路区域的平面格网包括在地面3划分的格网1,在地面3上包含了所设置的警冲标2。以格网内点面的高程均值作为高程基准,计算公式如下:
式中,
不同格网内依据获取的地面点的高程基准,垂直向上取一定距离建立缓冲区获取缓冲区内点云,点云集合如下:
式中,Pi为缓冲区内点,h
S3:采用RANSAC算法及选权迭代法对警冲标点云提取并对提取后的点云坐标进行投影后进行坐标拟合,获取警冲标平面位置坐标。其具体为,首先采用RANSAC算法对缓冲区内的圆柱型警冲标表面点云进行提取,并对绝对坐标系中的提取的警冲标表面点云投影到与警冲标垂直的平面上,一般与地面垂直,其公式如下:
式中,
利用投影后获取的投影后的平面坐标结合迭代选权的最小二乘法进行平面坐标拟合,其具体方法为:
在平面投影坐标系内,圆方程可以写为:
式中,X’、Y’为用来拟合的点坐标,
式中X
为保证拟合获取的警冲标平面位置坐标精度,降低粗差对拟合精度的影响,引入IGGIII定权方案为参与拟合的点云中每个点进行定权来提高拟合参数方程的抗差性。其权函数为:
式中:ω
参与拟合点
将
式中,
将上式按泰勒级数展开,并保留到一次项,令
则残差方程如下式:
依据上述式子可以得出其边界方程的残差方程,在解算时依据权函数为每个参与拟合点的偏差定权,重新解算获取拟合圆方程,进行迭代解算,直到两次迭代之间的偏差小于一定的阈值时停止。其公式为:
式中
按照换权迭代最小二乘的原理求解后,即可获得拟合的圆方程的参数值,即圆心坐标
虽然以上实施例已经参照附图对本发明目的的构思和实施例做了详细说明,但本领域普通技术人员可以认识到,在没有脱离权利要求限定范围的前提条件下,仍然可以对本发明作出各种改进和变换,故在此不一一赘述。
- 一种基于点云的警冲标平面位置测量方法
- 一种基于平面点云分割的多点云配准方法