使耦接至飞行器的电源同步的系统
文献发布时间:2023-06-19 09:33:52
技术领域
本发明涉及混合领域,具体地涉及在飞行器上同时使用电源。
更确切地说,本发明旨在提供一种使耦接在向飞行器的至少一个电负载供电的电网上的电源同步的系统和方法。
背景技术
在下文的描述中,作为示例,所涉及的飞行器是飞机。
目前飞机上常用的一种应急电源是应急风力涡轮机,通常称为“冲压空气涡轮机”(Ram Air Turbine,RAT)。
在紧急情况下在飞机上部署应急风力涡轮机,以产生充足的电力使得飞机能够飞行足够的时间直到其降落。应急风力涡轮机包括由叶片组成的螺旋桨,其转速恒定(+/-10%)。机械系统能够根据施加在叶片上的压力来调节旋转。该螺旋桨的旋转驱动向总线提供必要应急电力的发电机,该总线向诸如飞行控制器和关键航空电路之类的一定数量的关键电负载供电。
通常,应急风力涡轮机的尺寸被限定为提供最大电力以满足飞机电网可能消耗的峰值。实际上,这些峰值很少出现。在大多数情况下,电力需求要小得多,且应急风力涡轮机能够提供大于需求的电力。这样的结果是应急风力涡轮机的尺寸过大、较笨重且成本较高。
为了避免这种过大的尺寸,已知可以并联混合主要电源(在此为应急风力涡轮机)和辅助电源(例如由超级电容器、电池或其他形成的电源),以同时提供缺失的电力。
其他类型的电混合可以以相同的原理实施,举例来说:将燃料电池作为主要电源与辅助电源并联连接,以防止燃料电池溢流和/或过早损坏的任何风险;将以燃料作为主要电源供电的辅助动力单元与辅助电源并联连接,以防止燃料过度消耗或该单元过热的任何风险。
在此类电混合系统中,实现交流电源的电耦接特别重要。实际上,电源的输出必须完全同步才能实施有效的电力输送。
通常,通过“PLL”(锁相环,Phase-Locked Loop)控制来完成向电网供电的电源的同步。通过将电网的电压作为PLL控制的参考来执行此同步。但是,这些电网电压会受到(与电网负载、短路等相关的谐波)干扰,从而影响PLL控制,进而影响同步。
因此,电源的同步在很大程度上取决于电网的质量以及与电网相关的干扰。在可靠性是基本标准的情况下,这样的制约可能是不可接受的。而在飞行器的应急电源的场景下,尤其会存在这种情况。
发明内容
本发明的目的是解决上述缺陷。更确切地说,本发明的目的是提出一种能够优化和加强不同电源在同一交流电网上的同步的解决方案。
为了达到此目的,根据第一方面,本发明涉及一种使电源同步的系统,所述电源耦接在向飞行器的至少一个电负载(2)供电的电网上,所述系统包括:
向所述电负载供电的主要电源,所述主要电源包括多级发电机组,所述多级发电机组包括:
包括永磁发电机的第一级,
包括励磁器的第二级,以及
包括主要发电机的第三级;
向所述电负载供电的辅助电源;以及
使主要电源和辅助电源同步的同步装置,该同步装置被配置成:
测量主要电源的第一级的输出处的电压,以及
控制辅助电源以依赖于第一级的电压的频率和相位特性的电压向所述电负载供电。
有利地,本发明使得能够加强不同电源在同一交流电网上的同步。因此,由于上述控制具有鲁棒性且易于使用、尤其是因为航空发电机大多数是多级发电机,因此其特别适合于航空应用。
有利地且可选地,根据本发明的系统还可以包括以下特征中的至少一个:
辅助电源通过直流/交流DC/AC功率转换器与主要电源并联;
主要电源对应于产生电能的旋转电源;
主要电源是应急风力涡轮机、涡轮发电机、辅助动力单元、变频发电机或固定频率发电机;
该系统包括控制装置,该控制装置被配置成控制主要旋转电源产生电能以向所述电负载供电,该主要旋转电源的旋转频率以预定频率间隔调节,或者在更大频率间隔内不调节;
该同步装置被配置成,当主要电源的输出处的电压的频率达到给定的频率阈值时,通过所述转换器控制辅助电源以依赖于第一级的电压的频率和相位特性的电压向所述电负载供电,以向电负载提供额外的电源。
根据第二方面,本发明涉及一种使主要电源和辅助电源同步的同步装置,所述电源耦接在向飞行器的至少一个电负载供电的电网上,所述主要电源包括:多级发电机组,所述多级发电机组包括:
包括永磁发电机的第一级,
包括励磁器的第二级,以及
包括主要发电机的第三级;
所述同步装置被配置成:
测量第一级的输出处的电压,以及
控制辅助电源以依赖于第一级的电压的频率和相位特性的电压向所述电负载供电。
有利地且可选地,根据本发明的装置还可以包括以下特征中的至少一个:
所述同步装置将第一级的输出处的电压的频率与给定的频率阈值进行比较,并且当主要电源的输出处的电压的频率达到给定的频率阈值时执行命令,以向电负载提供额外的电源。
根据第三方面,本发明涉及一种使电源同步的方法,所述电源耦接在向飞行器的至少一个电负载(2)供电的电网上,该方法由根据第一方面的使耦接在向所述电负载供电的电网上的电源同步的系统来实施,所述方法包括以下步骤:
通过同步模块测量第一级的输出处的电频率;
通过辅助控制装置控制辅助电源以与第一级电频率同步的电频率向所述电负载供电。
有利地且可选地,根据本发明的方法还可以包括以下特征中的至少一个:
该方法包括以下步骤:
将第一级的输出处的电压的频率与给定频率阈值进行比较,并且当主要电源的输出处的电压的频率达到给定频率阈值时,通过所述同步装置执行控制步骤,以向电负载提供额外的电源。
根据第四方面,本发明涉及一种计算机程序产品,包括代码指令,当处理器执行程序时,该代码指令用于执行根据第三方面的方法。
附图说明
在阅读以下实施例的描述时,其他特征和优势将显现。将参考附图进行描述,其中:
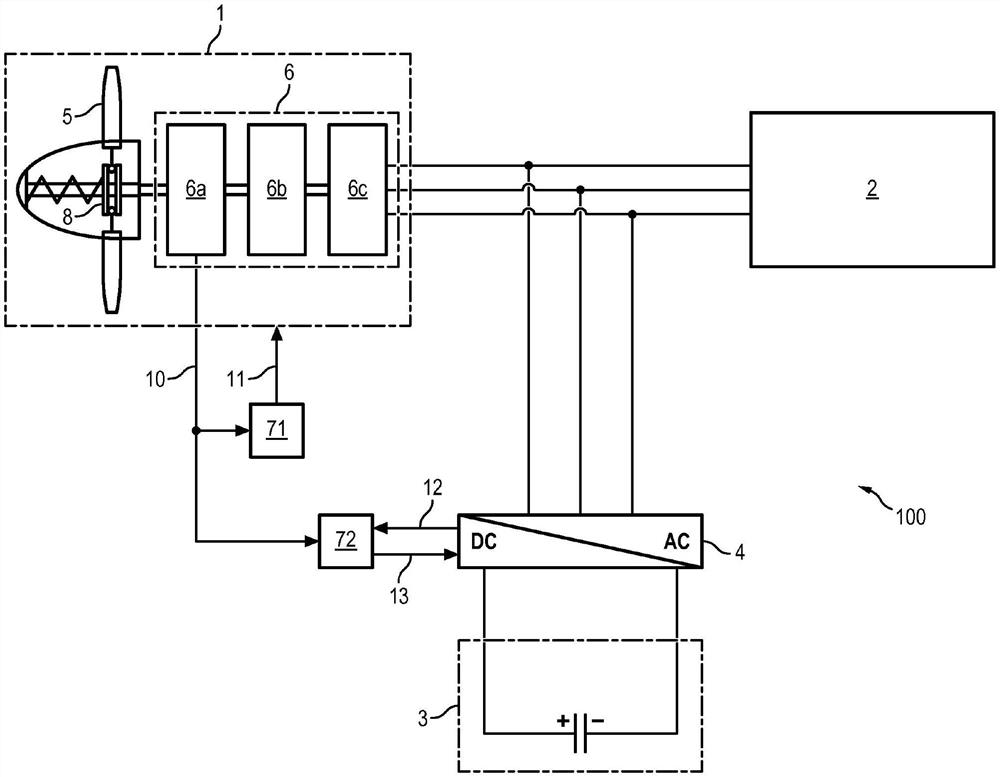
图1示出了根据本发明的使耦接在向飞行器的至少一个电负载供电的电网上的电源同步的系统;以及
图2示出了根据本发明的使耦接在向飞行器的至少一个电负载供电的电网上的电源同步的方法的步骤。
具体实施方式
图1示出了根据一个实施例的使耦接在飞行器中的电源同步的系统100,包括:
产生电能的主要电源1,通常称为“主要发电机组”,该主要电源与至少一个电负载2相连;
通过转换器4与主要电源并联连接的辅助电源3,该转换器例如是以交流电流运行的电网的直流/交流DC/AC功率转换器。
在图1的示例中,产生电能的主要电源1是应急风力涡轮机,该应急风力涡轮机包括叶片5以及连接到电负载2以向该电负载供电的发电机6。不过,也可以考虑产生电能的其他主要电源1,例如:燃气涡轮机、由燃料供应的辅助动力单元、涡轮发电机、辅助动力单元(APU)、变频发电机(VFG)或固定频率发电机(“整体驱动发电机”(Integrated DriveGenerator,IDG))。
发电机6基于如下三级系统:
第一级6a,称为“永磁发电机”(PMG),该第一级提供电能以使系统能够自主运行;
第二级6b,称为“励磁器”,该第二级用于控制第三级6c的磁化;以及
第三级6c,称为“主要发电机”,该第三级是产生电能的功率级。
可以通过一个或多个元件来实现辅助电源3,该元件例如是蓄电池、超级电容器、惯性飞轮、燃料电池、热电池、与电力电子器件相关联的旋转发电机或者这些不同元件的组合。
辅助电源3使得能够向转换器4供电,该转换器在需要时将补充主要电源1的额外电力输送给电负载2。举例来说,当主要电源1的使用水平达到预定水平时,为了防止用作主要电源1的应急风力涡轮机熄火的任何风险,输送这种补充电力。此外,尽管此处示出了单个电负载2,但是应当理解,主要发电电源1和转换器4可以通过供电电源总线连接到多个电负载2。电负载2例如是飞行控制致动器、计算单元或对于飞行器的平稳飞行来说必不可少的电负载。
当主要电源1是产生电能的旋转电源时,可考虑向电负载2供电的另一个实施例。主要电源1可以例如是应急风力涡轮机或燃气涡轮机。
旋转电源通常与机械调速器8关联。举例来说,针对包括同步发电机6的应急风力涡轮机,调速器8使得能够调整该应急风力涡轮机的叶片5的桨距角(对应于由叶片和叶片旋转平面形成的角度),以提供经调节的转速,因此转速以频率间隔调节,而不是恒定的。然后,风力涡轮机的发电机6的输出处的电频率与旋转频率成正比。
在额定工作条件下,主要旋转电源1以一电频率向电负载2供电,该电频率与以预定频率间隔调节/保持的旋转频率相关。更确切地说,相对于额定频率值调节主要旋转电源1的旋转频率,并且预定间隔的极限对应于额定频率附近的频率振荡。举例来说,如果主要旋转电源1是应急风力涡轮机,则预定间隔的上限和下限通常位于所选的额定频率的大约正负10%处。
在所考虑的实施例中,测量主要电源1的输出处的电频率并将该电频率与频率阈值比较。在同步的情况下,电频率与旋转频率直接相关,该频率阈值可以对应于预定频率间隔的下限,或者对应于该下限附近的频率,例如大于该下限几十赫兹。
主要旋转电源1可以由与之相连的控制装置71控制和监管。
控制装置71被配置成控制主要旋转电源1的电力供应。作为示例,对于包括同步发电机6的应急风力涡轮机来说,控制装置71被配置成接收(箭头10)发电机组输出处的电压以及控制(箭头11)主要电源1,以将电网的电压电平调节到固定值。因此,控制装置71可以经由发电机6的第二级6b来调节电压电平。
控制装置71还可以与通过转换器4和辅助电源3相连的同步装置72连接。
转换器4与主要电源1并联连接,同步装置72能够确定主要电源1的输出处的电频率,即,提供给电负载2的电气总线的频率。
图2示出了使耦接在向至少一个电负载2供电的电网上的电源1、3同步的方法的某些步骤。
然后,同步装置72被配置成:
在步骤E1中,恢复(箭头10)对通过发电机6的第一级6a的电压的测量,
在步骤E3中,通过转换器4控制(箭头13)辅助电源3以与第一级6a的电压的频率和相位特性同步的电压向电负载2供电。实际上,第一级6a的电压的频率和相位特性不受电负载2的影响,第一级6a可以用作可靠的频率参考。因此,基于第一级6a的、与电负载2引起的负载变化隔离的输出特性进行的同步使得能够优化辅助电源3的频率和相位特性和第一级6a的电压的频率和相位特性的收敛速度,从而加强同一交流电网上的不同电源的同步。
举例来说,上述同步通过锁相环PLL使辅助电源3的电频率依赖于主要电源1的第一级6a的电频率来实现。
实际上,在旋转电源的情况下,发电机组6中不同级的转子以相同的速度旋转。因此,在第三级6c的输出处产生的电网电压的频率与由第一级6a产生的电压频率成正比。上述频率之间的比率是第一级6a和第三级6c的极对数的函数。
同步装置72可以包括模块(未示出),以在永磁发电机6a和主要发电机6c的极对数之比不等于1时保证同步。在这种情况下,如果永磁发电机6a具有不同数量的极对,则将浆距角与永磁发电机6a和主要发电机6c的极对数之比相乘。
同样地,如果永磁发电机6a未与主要发电机6c对准,即二者具有恒定的角度偏移,则对该浆距角进行补偿。
此外,转换器4与主要电源1并联连接,同步装置72还可以被配置成:
恢复(箭头12)对转换器4端子处的电频率的测量,并且确定主要电源1的输出处的电压的频率,即,提供给电负载2的电气总线的频率。
在步骤E2中,将电压的频率的测量值与频率阈值进行比较,以及
当主要电源1的输出处的电压频率达到给定频率阈值时,执行步骤E3的控制(箭头13),以向电负载2提供额外的电源。
作为替换方案,同步装置72可以从主要电源1的电频率的测量值中得出主要旋转电源1的使用水平,将该使用水平与极限使用水平(表示该电源的过度使用水平)进行比较,并基于该比较结果控制辅助电源3的电力供应。
上述一组操作是实时的且是在时间上连续实现的。
有利地,针对旋转的主要电源1描述的同步系统(100)特别容易实现,该系统不需要对现有的旋转电源(例如应急风力涡轮机、涡轮机)进行修改(例如预先限定静态电压特性、重配置发电机6)。
因此,所描述的同步(100)使得能够将由多级发电机组的第一级产生的交流电压用作使电网上的辅助电源同步(通过PLL实现)的参考。该解决方案能够消除诸如电压谐波、失衡和短路之类的与电网质量相关的制约。
由于第一级6c的电压的波形不依赖于电网,因此所描述的同步系统(100)能够免受与电网相关的扰动,因而同步系统更加鲁棒。
此外,与使用发电机组的输出处的电压的情况相比,所描述的同步系统(100)能够更快地达到同步的收敛。
因此,所描述的同步系统(100)使得能够加强同一交流电网上不同电源的同步。因此,由于此类控制具有鲁棒性且易于使用、尤其是由于航空发电机是多级发电机,因此其特别适合于航空应用。
- 使耦接至飞行器的电源同步的系统
- 耦接部件、用于耦接的系统和用于安装耦接部件的方法