一种基于GMM和BP神经网络的路感模拟方法
文献发布时间:2023-06-19 10:51:07
技术领域
本发明涉及车辆技术领域,具体涉及一种基于GMM和BP神经网络的路感模拟方法。
背景技术
转向路感,又称转向力感、方向盘反馈力矩,是指驾驶员通过方向盘反馈力矩感受到的反向阻力矩。由于这种路感可以为驾驶员实时地传递重要的路面信息,其对于驾驶员做出正确决策,保证驾驶安全具有重要意义。因此,对于模拟驾驶器或使用线控转向系统的车辆而言,产生可信度较高的路感是其不可缺少的功能之一。然而,目前尚无能够对路感进行高精度建模的方法,因为大多数方法都设计机理建模,需要整定的参数较多,且存在大量难以获得的参数,难以建立高可信度的路感模型。
专利号为CN201420478919.7、名称为“基于C-EPS结构的力感模拟系统”的实用新型专利公开了基于C-EPS结构的力感模拟系统,其采用机理建模方法进行了路感建模,该方法所得模型的精度无法保证。
发明内容
为了解决上述技术问题,本发明的目的在于提供一种基于GMM和BP神经网络的路感模拟方法,以实车试验数据、高斯混合模型(GMM)分类算法和BP神经网络算法进行建模,获得基于GMM和BP神经网络的路感模拟模型,解决传统机理建模存在的模型结构复杂、精度不高等问题。
为了达到上述目的,本发明提供一种基于GMM和BP神经网络的路感模拟方法,包括以下步骤:
步骤一、实车路测试验并采集数据:选取驾驶员进行实车试验,车辆在试验道路中行驶,采集的试验数据包括车速、车辆侧向加速度、车辆横摆角速度、车辆垂向载荷、驾驶员方向盘转角、方向盘角速度和方向盘力矩;
步骤二、试验数据预处理:对试验数据去除异常点后进行归一化处理,得到归一化试验数据集;
步骤三、归一化试验数据聚类:对归一化试验数据使用高斯混合模型分类算法进行聚类,聚类后得到与聚类群落数量k相同个数的数据类,k为大于1的正整数;
步骤四、划分训练数据集和测试数据集:将归一化试验数据集划分为训练数据集和测试数据集;
步骤五、训练基于GMM和BP神经网络的路感模型:使用训练数据集和BP神经网络算法,训练得到k个与数据类数量相同的基于GMM和BP神经网络的路感模拟模型;训练模型时,模型的输入变量为车速、车辆侧向加速度、车辆横摆角速度、车辆垂向载荷、驾驶员方向盘转角、方向盘角速度,输出变量为方向盘力矩;
步骤六、测试基于GMM和BP神经网络的路感模型:使用测试数据集测试得到的k个基于GMM和BP神经网络的路感模拟模型;
步骤七、判断所得路感模型是否满足要求:若所得路感模型满足精度要求则建模成功,否则重新进行实车路采试验;
步骤八、根据得到的基于GMM和BP神经网络的路感模拟模型进行路感模拟。
进一步地,在步骤一的实车试验中:试验道路类型包括城市道路、高速道路和市郊道路。
进一步地,在步骤一的实车试验中:车辆行驶工况包括直行、倒车、转弯、原地转向、上坡和下坡。
进一步地,在步骤二中,被去除的异常点包括超出正常取值范围的数据点和分布严重偏离的数据点。
所述超出正常取值范围的数据点定义为:明显不处于正常范围之内的点。如,某次试验中,最高车速仅为60km/h,则该次试验所采数据集中,车速大于60km/h的数据点均为超出正常范围的数据点。再如,再方向盘明显偏右边时候,测得的方向盘转角值为负的数据点均为超出正常范围的数据点。
所述分布严重偏离的数据点定义为:数据分布于相关变量数据c倍标准差范围之外的点。即,计算某次试验中所采各个变量数据的标准差,若某数据点的一个或几个变量值大于相关变量标准差的c倍或小于相关变量标准差的负c倍,则称其为分布严重偏离的点。优选地,该倍数c可取但不限于取3倍。
进一步地,在步骤二中,对试验数据按照下式进行归一化处理,得到归一化试验数据:
式中,i为数据编号,j为变量编号,x
优选地,在步骤三中,使用高斯混合模型分类算法进行聚类时,参与聚类的变量包括但不限于纵向车速、车辆横向加速度、车辆横摆角速度、车辆垂向载荷、方向盘转角和方向盘角速度,群落数量k为4个。
更进一步地,训练高斯混合模型的步骤为:
1)确定群落数量k=1
2)随机设置各个类群对应的高斯分布函数参数,即概率ω
3)E步骤:计算每个样本数据x
其中,
计算后验概率
4)M步骤:重新计算各聚类的参数值。
5)重复步骤3)和4),迭代计算指导参数值收敛或者迭代次数达到上限值。
6)计算该k值对应的贝叶斯指标BIC值。
BIC=-2log(L)+klog(n)
7)k=k+1,迭代进行步骤2)~6),直到BIC值小于阈值或者迭代次数达到上限值。
8)取BIC值最小的情况作为最佳聚类设置。
在进行新数据的预测时,计算得到每个类对应的后验概率值
优选地,在步骤四中,划分训练数据集和测试数据集时,从归一化试验数据集中随机选择一定数量比例p的数据点作为训练数据集、其它均作为测试数据集。在一优选实施例中,该比例p为90%,即训练数据集中的数据点数量与测试数据集中的数据点数量比为9:1。
优选地,在步骤五中,使用训练数据集和BP神经网络算法进行建模,训练得到与数据类数量相同的k个基于GMM和BP神经网络的路感模拟模型。训练模型时,BP神经网络模型的输入变量包括车速、车辆侧向加速度、车辆横摆角速度、车辆垂向载荷、驾驶员方向盘转角、方向盘角速度;输出变量为方向盘力矩。训练模型时,使用属于不同群落的训练模型训练得到与相关群落对应的力感模型,且该模型仅可对相关群落的点进行预测,否则难以保证预测精度。使用同一类型的训练数据点训练所得模型与数据点所属类型相关,即某类型训练数据点对应的路感模拟模型只能用于该类型数据点的方向盘力矩预测。在本发明的实施例中,经过训练,k=4个类型的训练数据点训练后将得到对应的k=4个路感模拟模型。
训练基于GMM和BP神经网络的路感模拟模型时,BP神经网络的相关参数确定步骤如下:
1)确定BP神经网络的输入参数和输出参数(输入变量包括车速、车辆侧向加速度、车辆横摆角速度、方向盘转角、方向盘角速度;输出变量为方向盘力矩);
2)确定BP神经网络隐含层数量(选择1个隐含层);
3)确定隐含层节点数量(每个隐含层节点确定为10个);
4)确定各个节点的激活函数和整体学习函数(激活函数确定为Sigmoid函数,学习函数使用learngdm函数);
5)使用训练数据来训练BP神经网络模型;
6)根据模型测试结果判断是否需要返回步骤2);若训练结果满足需求,则不返回,直接进行下一步,否则返回到步骤2);
7)输出神经网络模型。
进一步地,测试基于GMM和BP神经网络的路感模拟模型时,可使用但不限于使用均方误差,即MSE值,作为模型质量的评判标准。使用测试数据集测试所述基于GMM和BP神经网络的路感模拟模型时,步骤为:
1)取出测试数据集中的测试数据点,使用GMM聚类所得结果计算该测试数据点属于各个群落的后验概率
2)使用测试数据点所属群落对应的基于GMM和BP神经网络模型,对该测试数据点的方向盘力矩进行预测,将该测试数据点对应的车速、车辆侧向加速度、车辆横摆角速度、车辆垂向载荷、方向盘转角、方向盘角速度作为输入变量输入与该测试数据点对应的基于GMM和BP神经网络的路感模拟模型,得到预测的方向盘力矩值;
3)迭代进行步骤1)和2),直到所有测试数据点的方向盘力矩都得到了预测;
4)计算整个预测数据集的预测方向盘力矩值与真实方向盘力矩值之间的均方误差,即MSE值;
若MSE值大于阈值α,则认为所建立的基于GMM和BP神经网络的路感模拟模型可接受。否则不可接受,需要进行补充路采试验。该阈值α由专家根据经验确定,在一优选实施例中,阈值α设置为0.15。
建模完成后,还包括模型运用步骤,根据所得的k个基于GMM和BP神经网络的路感模拟模型进行路感模拟。采集车辆实时的行驶数据作为新数据,包括车速、车辆侧向加速度、车辆横摆角速度、车辆垂向载荷、驾驶员方向盘转角、方向盘角速度,根据行驶数据,通过高斯混合模型计算得到每个类对应的后验概率值
由于采用上述技术方案,本发明达到以下技术效果:本发明以实车路采数据为基础,采用高斯混合模型分类算法(GMM)进行聚类,并基于BP神经网络算法进行建模,相较于现有技术具有建模时间短、精度高、运算速度快的显著优势;根据本发明得到的路感模拟模型进行路感模拟,可以获得逼真的转向路感,解决了传统机理建模的模型精度不高、应用过程中实时性难以保证等问题。
附图说明
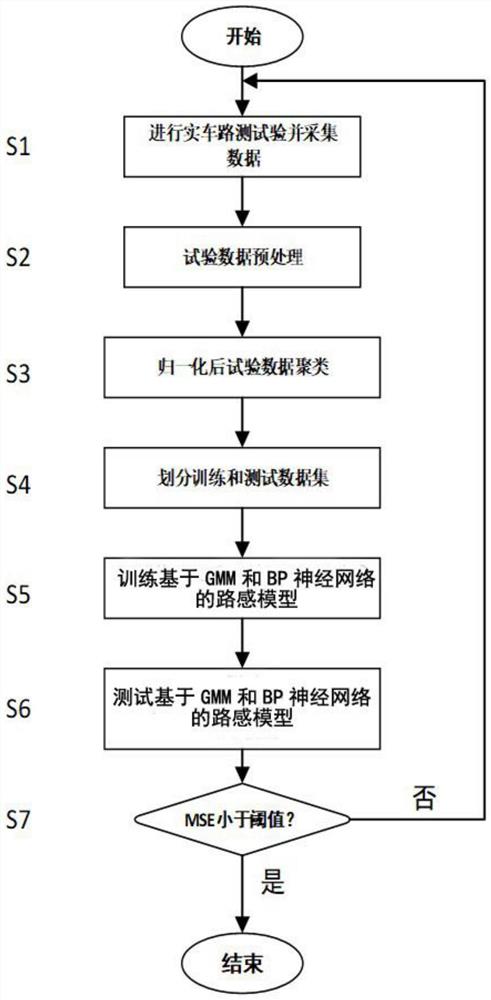
图1为根据本发明基于GMM和BP神经网络的路感模拟方法中的建模步骤流程图。
图2为根据本发明的实施例中采集的高速工况的方向盘转角曲线(局部)。
图3为根据本发明的实施例中的模型测试数据(局部)。
具体实施方式
为了使本技术领域的人员更好地理解本发明,下面将结合实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所做的等效变化与修饰前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
请参阅图1至图3,本实施例提供一种基于GMM和BP神经网络的路感模拟方法,包括建模步骤S1-S7,以及模型应用步骤。以下结合图1对建模过程的步骤S1-S7进行详细说明。
S 1.实车路测试验并采集数据:
选取驾驶员进行实车试验,车辆在试验道路中行驶,试验道路类型包括但不限于城市道路、高速道路和市郊道路;涉及的车辆行驶工况包括直行、倒车、转弯、原地转向、上坡和下坡。
采集的试验数据包括车速、车辆侧向加速度、车辆横摆角速度、车辆垂向载荷、驾驶员方向盘转角、方向盘角速度和方向盘力矩等。方向盘转角、方向盘角速度、方向盘力矩使用转角扭矩传感器测得,型号为KISTLER MSW DTI sensors。纵向车速、车辆横向加速度、车辆横摆角速度等其他数据由惯导系统测得,型号为OxTs RT3002。
本实施例中数据采集频率为50Hz。如图2所示,为本实施例试验中采集的高速工况的方向盘转角曲线(局部),用实际的方向盘转角(°)-数据编号曲线表示。
S2.试验数据预处理:
处理试验数据包括去除异常点、数据归一化。被去除的异常点包括超出正常取值范围的数据点和分布严重偏离的数据点。对试验数据去除异常点的方式可以是人工去除,或者采用低通滤波器进行滤波。
本实施例中,对采集的试验数据按照下式进行归一化处理,得到归一化试验数据。归一化公式可采用但不限于采用下式:
式中,i为数据编号,j为变量编号,x
经过预处理后,得到归一化试验数据集。
S3.归一化试验数据聚类
对归一化试验数据使用高斯混合模型分类算法进行聚类,本实施例聚类后得到k=4个与聚类群落数量相同的数据类。
使用高斯混合模型分类算法进行聚类时,参与聚类的变量包括但不限于车速、车辆侧向加速度、车辆横摆角速度、车辆垂向载荷、驾驶员方向盘转角和方向盘角速度。
训练高斯混合模型的步骤为:
1)确定群落数量k=1
2)随机设置各个类群对应的高斯分布函数参数,即概率ω
3)E步骤:计算每个样本数据x
其中,
计算后验概率
4)M步骤:重新计算各聚类的参数值。
5)重复步骤3)和4),迭代计算指导参数值收敛或者迭代次数达到上限值。
6)计算该k值对应的贝叶斯指标BIC值。
BIC=-2log(L)+klog(n)
7)k=k+1,迭代进行步骤2)~6),直到BIC值小于阈值或者迭代次数达到上限值。
8)取BIC值最小的情况作为最佳聚类设置。本实施例中,群落数量为4个。
在进行新数据的预测时,计算得到每个类对应的后验概率值
S4.划分训练数据集合测试数据集
划分训练数据集和测试数据集时,从归一化试验数据集中随机选择一定比例p的数据点作为训练数据集、其它均作为测试数据集。本实施例中p为90%,即训练数据集中数据点数量与测试数据集中数据点数量比例为9:1。
S5.训练基于GMM和BP神经网络的路感模型:
使用训练数据集和BP神经网络算法进行建模,训练得到与数据类数量相同的基于GMM和BP神经网络的路感模拟模型,本实施例得到4个路感模拟模型。训练模型时,BP神经网络模型的输入变量包括车速、车辆侧向加速度、车辆横摆角速度、车辆垂向载荷、驾驶员方向盘转角、方向盘角速度;输出变量为方向盘力矩。使用同一类型的训练数据点训练所得模型与数据点所属类型相关,即某类型训练数据点对应的路感模拟模型只能用于该类型数据点的方向盘力矩预测。本实施例由4个类型的训练数据点训练后将得到对应的4个路感模拟模型。
训练基于GMM和BP神经网络的路感模拟模型时,BP神经网络的相关参数确定步骤如下:
1)确定BP神经网络的输入参数和输出参数,本实施例中的输入变量包括车速、车辆侧向加速度、车辆横摆角速度、方向盘转角、方向盘角速度;输出变量为方向盘力矩;
2)确定BP神经网络隐含层数量,本实施例选择1个隐含层;
3)确定隐含层节点数量,本实施例每个隐含层节点确定为10个;
4)确定各个节点的激活函数和整体学习函数,本实施例激活函数确定为Sigmoid函数,学习函数使用learngdm函数;
5)使用训练数据来训练BP神经网络模型;
6)根据模型测试结果判断是否需要返回步骤2);若训练结果满足需求,则不返回,直接进行下一步,否则返回到步骤2);
7)输出神经网络模型。
所得BP神经网络模型共有1个隐含层,每个隐含层10个节点,1个输入层和1个输出层;所有节点的激活函数均为Sigmoid函数,且均为全连接;学习函数使用learngdm函数。
本实施例使用惠普Z1G6工作站进行训练,4个路感模型的训练总耗时为1小时54分钟。
S6.测试基于GMM和BP神经网络的路感模型:
测试基于GMM和BP神经网络的路感模型时,使用测试数据集对所得基于GMM和BP神经网络的路感模拟模型进行测试的步骤为:
1)取出测试数据集中的测试数据点,使用GMM聚类所得结果计算该测试数据点属于各个群落的后验概率
2)使用测试数据点所属群落对应的基于GMM和BP神经网络模型,对该测试数据点的方向盘力矩进行预测,将该测试数据点对应的车速、车辆侧向加速度、车辆横摆角速度、车辆垂向载荷、方向盘转角、方向盘角速度作为输入变量输入与该测试数据点对应的基于GMM和BP神经网络的路感模拟模型,得到预测的方向盘力矩值;
3)迭代进行步骤1)和2),直到所有测试数据点的方向盘力矩都得到了预测;
4)计算整个预测数据集的预测方向盘力矩值与真实方向盘力矩值之间的均方误差,即MSE值。
本实施例中,如图3所示,其表示模型测试曲线(局部),由图可知在0-600s的时间段内,模拟的方向盘力矩-时间曲线(sim)与实际的方向盘力矩-时间曲线(real)基本重合,MSE值为0.12。
S7.判断所得路感模型是否满足要求
测试所得MSE值=0.12,远小于专家预设的阈值α=0.15,所得模型满足精度要求,模型可接受,不需要进行补充路采试验。
模型应用步骤:
建模完成后,根据本发明的路感模拟方法,还包括模型应用步骤:根据所得基于GMM和BP神经网络的路感模拟模型进行路感模拟。将所得4个基于GMM和BP神经网络的路感模拟模型输入驾驶模拟器中,在驾驶模拟器上进行仿真驾驶试验时,实时采集模拟车辆的车速、车辆侧向加速度、车辆横摆角速度、车辆垂向载荷、驾驶员方向盘转角、方向盘角速度等行驶状态参数,根据高斯混合模型分类算法计算得到每个类对应的后验概率值
以上所述仅为本发明较佳的实施方式,并非用以限定本发明的保护范围;同时,以上的描述对于相关技术领域中具有通常知识者应可明了并据以实施,因此其他未脱离本发明所揭露概念下所完成之等效改变或修饰,都应涵盖在本发明的保护范围之内。
- 一种基于GMM和BP神经网络的路感模拟方法
- 一种基于GMM和高斯过程回归的路感模拟方法