用于引导器械的装置和方法
文献发布时间:2023-06-19 11:14:36
技术领域
本公开内容广泛涉及用于引导器械插入受试者体内的装置和方法。
背景技术
随着当前技术的使用,期望微创技术/手术来进入受试者的各部位。例如,经皮进入组织,如将工具插入受试者体内并去除组织或进行任何类型过程的微创手术。一些过程通常使用空心针刺穿受试者的皮肤,并且以基本精确的方式将针插入受试者中,以与靶标碰撞。在一些过程中,穿过空心针将导线插入,并且该线引导可以破碎和去除组织的内窥镜外科手术器械的插入。类似地,其他类型的过程可能需要将工具插入受试者体内。此类过程可以包括活检、问诊、椎体成形术、椎间盘切除术,以及其他针刺或工具穿刺和干预。通常,使用成像系统(例如,X射线、超声、计算机断层(CT)扫描、磁共振成像(MRI))来辅助如上所述的技术。例如,一些过程通常在整个过程中使用C臂透视来定位靶标。
尽管已经认识到,与开放切口相比,微创技术具有如创伤较小、疼痛较少、疤痕较小、感染风险较小、恢复较快等益处,但也认识到,这类微创技术通常难以实施。目前,将工具进入受试者体内的插入过程在很大程度上取决于外科医生操作和对准工具的经验。应当理解,手动过程的冗长且耗时的部分是工具或针的对准和操作。
此外,在使用微创技术期间,延长过程时间通常会增加受试者围术期并发症的风险。此外,由于暴露于放射性成像,延长过程时间通常会增加手术人员的健康风险。此外,应当理解,鉴于手术室通常需求恒定,延长过程时间给医院带来了负担。
鉴于诸如上述现有过程等技术所面临的挑战,正在开发机器人系统以促进或协助此类过程。例如,目前正在开发许多由图像引导系统和机动化针插入驱动器辅助的自动化机器人系统。机器人系统也遇到了当前从业者在将器械引入受试者体内时面临的一些限制。
当前申请人的于2016年7月21日公开的美国专利公开2016/0206383(其公开内容通过引用并入于本文)描述了用于引导器械的系统和装置。
期望提供鉴于从业者使用的当前系统的用于将器械引导到受试者体内改进的装置和方法来。
发明内容
本公开内容的实施方式的一个方面涉及一种器械支架,该器械支架用于执行使用于进入受试者内的靶标(例如,肿瘤、肾结石、脓肿或其他项)的器械(例如,针、空心针、工具、线)对准的过程。所述器械支架可以是保持器械的任何装置。
所述器械支架被配置为由刚性臂或关节臂支撑,并且被定位使得所述器械可以被插入所述受试者中以击中靶标。
所述器械支架包括具有用于插入所述器械的入口点的第一层和具有用于供所述器械从所述支架中离开的出口点的第二层。所述入口点和所述出口点都可以位于所述第二层内。
所述器械包括引导通道,以引导所述器械连接在所述入口点与所述出口点之间。
所述过程借助于成像系统(例如,C臂、超声、CT扫描、MRI)进行,该成像系统在显示器上连续显示所述器械和所述靶标。备选地,所述成像系统(例如,X射线机)可以在显示器上显示所述器械和所述靶标的快照。所述器械支架的所述第一层和第二层配备有标记,所述标记在所述过程中可以在所述成像系统的所述显示器上被看到。所述标记可以覆盖所述整个层。在对准使得所述器械在插入所述受试者时将与所述靶标碰撞时,所述第一层上的所述标记被设计为与所述第二层的所述标记形成预定义图案。备选地,插入所述第二层中的器械可以作为所述第二层上的标记,以与所述第一层上的所述标记对准。
本公开内容可以应用于用于参考将与医学成像装置结合使用的器械位置的任何方法。
因此,根据本公开内容的示例性实施方式,提供了一种用于使用于进入受试者内靶标的器械对准的器械支架,该器械支架包括:第一层;第二层;具有入口点和出口点的器械引导部,所述器械引导部连接在所述第一层和所述第二层之间并且被配置为将所述器械从所述入口点引导到所述出口点;其中所述第一层和所述第二层包括成像系统可见的第一层标记和第二层标记;并且其中,当对准所述第一层和所述第二层使得所述器械将与所述靶标碰撞时,如在所述成像系统的显示器上所看到的,所述第一层标记被设计为与所述第二层标记相对于所述靶标形成预定义图案。
在本公开内容的示例性实施方式中,所述第一层标记包括第一几何形状,并且所述第二层标记包括与所述第一几何形状不同的第二几何形状。可选地,所述第一几何形状包括线,并且所述第二几何形状包括一对或多对箭或箭头,并且在所述预定义图案中,所述一对或多对箭或箭头指向所述线,该线位于所述一对或多对箭或箭头之间。可选地,在所述预定义图案中,在所述一对或多对箭或箭头与所述线之间存在间隙。备选地,所述第一几何形状包括表示度量单位的线性刻度的线,并且所述第二几何形状包括线,并且在所述预定义图案中,所述第二几何形状的所述线与所述第一几何形状的中线对准。备选地,所述第一几何形状包括一对或多对箭或箭头,并且所述第二几何形状包括以所述出口点为中心的两条十字形的线,并且在所述预定义图案中,所述一对或多对箭或箭头指向所述第二几何形状的所述线,使得每条线位于所述一对或多对箭或箭头之间。可选地,在所述预定义图案中,在所述一对或多对箭或箭头与所述第二几何形状的所述线之间存在间隙。备选地,所述第一几何形状包括表示度量单位的线性刻度的两组或更多组线,并且所述第二几何形状包括以所述出口点为中心的两条十字形的线,并且在所述预定义图案中,所述第二几何形状的每条线与表示度量单位的线性刻度的每组线的中线对准。备选地,所述第一层标记包括以所述入口点为中心的十字,并且所述第二层标记包括以出口点为所述中心的十字,并且在所述预定义图案中,所述第一层标记的所述十字和所述第二层标记的所述十字重合。可选地,所述器械支架还包括从所述第二层延伸的突起。
在本公开内容的示例性实施方式中,所述器械是空心针。或者,所述器械是长形的工具。在本公开内容的示例性实施方式中,所述器械支架包括用于装配定位臂的手柄。可选地,所述手柄被配置为使所述器械支架能够相对于所述定位臂旋转。在本公开内容的示例性实施方式中,所述第一层或所述第二层包括附加标记,其不是所述预定义图案的一部分,以在对准时由用户识别所述第一层或所述第二层。可选地,所述靶标经皮定位。在本公开内容的示例性实施方式中,所述器械支架对所述成像系统是透明的。可选地,所述器械引导部垂直于所述第一层和所述第二层。在本公开内容的示例性实施方式中,所述器械引导部与所述第一层和所述第二层形成预选角度。
根据本公开内容的示例性实施方式,还提供了一种将器械与受试者内的靶标对准的方法,该方法包括:在定位臂上提供如上所述的器械支架;定位成像系统以在显示器上显示所述靶标和所述器械支架;并且对准所述器械支架,使得所述第一层标记和所述第二层标记相对于所述靶标在所述成像系统的所述显示器上形成预定义图案。
在本公开内容的示例性实施方式中,将所述器械对准以经皮进入所述受试者体内的所述靶标。可选地,所述定位臂是定位于所述受试者上方的关节臂。
根据本公开内容的示例性实施方式,还提供了一种用于使用于进入受试者内靶标的器械对准的器械支架,该器械支架包括:第一层;第二层,所述第二层通过柱与所述第一层连接;具有入口点和出口点的器械引导部,所述器械引导部位于所述第二层内并被配置为将所述器械从所述入口点引导至所述出口点;其中所述第一层包括形成成像系统可见的第一层标记的标记;并且其中,当对准所述第一层和所述第二层使得所述器械将与所述靶标碰撞时,如在所述成像系统的显示器上所看到的,所述第一层标记被设计为与在所述第二层内的由所述成像系统可见的所述器械相对于所述靶标形成预定义图案。
在本公开内容的示例性实施方式中,所述第一层标记包括第一几何形状。可选地,所述第一几何形状包括表示度量单位的线性刻度的线,并且在所述预定义图案中,所述器械对准所述第一几何形状的中线。备选地,所述第一几何形状包括一对或多对箭或箭头,并且在所述预定义图案中,所述一对或多对箭或箭头指向所述器械,该器械位于所述一对或多对箭或箭头之间。可选地,在所述预定义图案中,在所述一对或多对箭或箭头与所述器械之间存在间隙。可选地,所述器械支架还包括从所述第二层延伸的突起。
在本公开内容的示例性实施方式中,所述器械是空心针。备选地,所述器械是长形的工具。在本公开内容的示例性实施方式中,所述器械支架包括用于装配定位臂的手柄。可选地,所述手柄被配置为使所述器械支架能够相对于所述定位臂旋转。在本公开内容的示例性实施方式中,所述第一层或所述第二层包括附加标记,其不是所述预定义图案的一部分,以在对准时由用户识别所述第一层或所述第二层。可选地,所述靶标经皮定位。在本公开内容的示例性实施方式中,所述器械支架对所述成像系统是透明的。
根据本公开内容的示例性实施方式,还提供了一种将器械与受试者内的靶标对准的方法,该方法包括:在定位臂上提供如上所述的器械支架;将所述器械插入所述器械支架;定位成像系统以在显示器上显示所述靶标、所述器械支架和所述器械;并且对准所述器械支架,使得所述第一层标记和所述器械相对于所述靶标在所述成像系统的所述显示器上形成预定义图案。
在本公开内容的示例性实施方式中,将所述器械对准以经皮进入所述受试者体内的所述靶标。可选地,所述定位臂是定位于所述受试者上方的关节臂。
附图说明
本公开内容将通过结合附图进行的以下详细描述来理解并更好地领会。出现在多于一个图中的相同结构、元件或部件在它们所出现的所有图中通常用相同或相似的数字标记,其中:
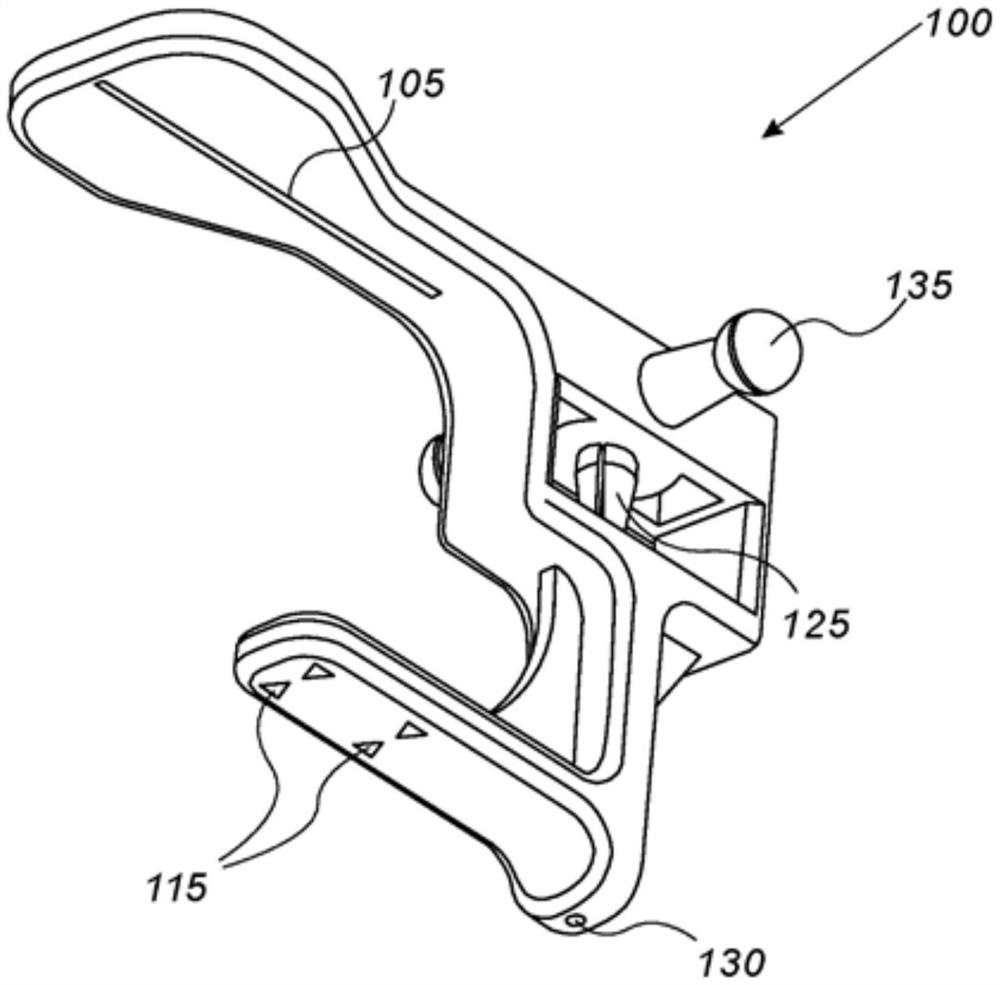
图1A是根据本公开内容的示例性实施方式的器械支架的仰视立体图;
图1B是根据本公开内容的示例性实施方式的器械支架的俯视立体图;
图2A是根据本公开内容的示例性实施方式的第一可替选器械支架的仰视立体图;
图2B是根据本公开内容的示例性实施方式的第一可替选器械支架的俯视立体图;
图2C是根据本公开内容的示例性实施方式的第一可替选器械支架的俯视图;
图3A是根据本公开内容的示例性实施方式的第二可替选器械支架的侧视立体图;
图3B是根据本公开内容的示例性实施方式的第二可替选器械支架的仰视图;
图3C至图3D是根据本公开内容的示例性实施方式的在第二可替选器械支架上的标记的第一示例的示图,并且图3E是由在第二可替选器械支架上的示例性标记形成的预定义图案的示图;
图3F至图3G是根据本公开内容的示例性实施方式的在第二可替选器械支架上的标记的第二其他示例的示图,并且图3H是由在第二可替选器械支架上的示例性标记形成的预定义图案的示图;
图4A是根据本公开内容的示例性实施方式的第三可替选器械支架的仰视立体图;
图4B是根据本公开内容的示例性实施方式的第三可替选器械支架的俯视立体图;
图4C是根据本公开内容的示例性实施方式的第三可替选器械支架的俯视图;
图5A至图5G是根据本公开内容的示例性实施方式的对准器械支架的过程的示意图;
图6A至图6F是根据本公开内容的另一示例性实施方式的对准器械支架的第一可替选过程的示意图;以及
图7A至图7D是根据本公开内容的示例性实施方式的对准器械支架的第二可替选过程的示意图。
现在详细地具体参考附图,需要强调的是,所示的细节是作为示例并且出于对本公开内容的实施方式的说明性讨论的目的。在这方面,关于附图进行的描述使得本领域技术人员容易理解如何可以实践本公开内容的实施方式。
在一个或多个附图中出现的相同或重复或等同或相似的结构、元件或部件通常标有相同的附图标记,可选地还用一个或多个附加字母来区分相似的实体或实体的变体,并且可以不对其重复标记和/或描述。隐含对先前呈现的元件的引用,而不必进一步引用它们所出现的附图或描述。
图中所示部件和特征的尺寸是为了表达方便或清楚而选择的,并且不一定按比例或真实的视角示出。为了方便或清楚起见,一些元件或结构未示出或仅部分和/或以不同的视角或从不同的视点示出。
具体实施方式
图1A是根据本公开内容的示例性实施方式的器械支架100的仰视立体图,并且图1B是器械支架100的俯视立体图。器械支架100用于保持用于经皮进入受试者的身体的器械310(例如,如图3A和图4A至图4C所示)。在本公开内容的示例性实施方式中,定位臂510(例如,如图5A至图5G、图6A至图6F和图7A至图7D所示的刚性臂或关节臂)支撑器械支架100,并且用于将器械支架100锁定在受试者上方的特定位置和方位,从而可以将器械310(例如,空心针或其他类型的探针)插入器械支架中并准确地引导至受试者体内。可选地,器械支架100包括手柄135以装配定位臂510。手柄135由定位臂510保持,以保持器械支架100稳定或相对于定位臂510旋转。手柄135可以是在器械支架100主体的任何部分(包括沿第一层140或第二层145)连接到器械支架100的成对的球形突起。此外,器械支架100包括三维标记,用于协助将器械310对准以经皮进入靶标。将理解,可以使用任何数量的标记来形成三维标记。
在本公开内容的示例性实施方式中,在成像系统520(图5A至图5G、图6A至图6F和图7A至图7D)(例如,X射线或C臂)下执行器械支架100的定位,该成像系统520可以透视器械支架100和受试者的身体以对准器械310,以使其瞄准受试者体内的期望点,例如使空心针对准以到达受试者肾脏内的结石。可选地,器械310对于成像系统520不是透明的,从而在成像系统520的显示器上察看。例如,器械支架100可以由塑料制成,以使其透明,并且器械310可以由金属制成,以对成像系统520不透明。
在本公开内容的示例性实施方式中,器械支架100包括第一层140和第二层145,它们通过器械引导部125连接在一起,该器械引导部125被配置为保持器械310以进入受试者。器械引导部还适于在穿透患者皮肤时防止器械310弯曲。可选地,器械引导部125垂直于两层(140、145)或形成预选角度。
在本公开内容的示例性实施方式中,第一层140包括用于将器械310插入第一层140的入口点120和对成像系统520不透明的第一层标记105(或多个标记),以识别第一层140并使其相对于第二层145对准。可选地,第一层标记105可以是线。在本公开内容的一些实施方式中,第一层140、第二层145和器械引导部125形成为单个模具。在本公开内容的一些实施方式中,器械引导器125、入口点120和对应的出口点130可以全部位于单个平面中,并且不一定位于手柄135之间。
在本公开内容的示例性实施方式中,第二层145包括供器械310离开器械支架100的出口点130,并且包括一个或多个对成像系统520不透明的第二层标记115,以使成像系统520能够识别第二层145,并且使得用户能够使第二层145相对于第一层140对准。可选地,第二层标记115包括一对或两对箭头。可选地,所述一对或两对箭头是三角形的,并且对准,使得它们各自的顶点彼此面对。可选地,器械引导部125通过器械支架100的主体并且可选地垂直于第一层140和第二层145,或以预选角度将器械310从入口点120引导至出口点130。
在本公开内容的示例性实施方式中,当对准第一层140和第二层145使得在器械插入受试者中时将与靶标560碰撞时,如在成像系统520的显示器550(例如,参见图5A和图5B)上在靶标560附近所看到的,第一层标记105被设计为与第二层标记115形成预定义图案。本领域技术人员将理解,器械也可以按照从业者相关过程所要求的方式刺入、进入、触碰、刺穿、穿刺或以其他方式与靶标相互作用。
在本公开内容的一些实施方式中,不是预定义图案部分的额外的透明标记108被放置在第一层140或第二层145上,以使器械支架100的用户能够更好地抓握器械支架100和/或察看器械支架100。
图2A是根据本公开内容的示例性实施方式的第一可替选器械支架200的仰视立体图,图2B是第一可替选器械支架200的俯视透视图,并且图2C是第一可替选器械支架200的俯视图。如在器械支架100中,器械支架200包括手柄235,该手柄235用于通过定位臂510保持器械支架200或相对于定位臂510旋转器械支架200。手柄235可以是成对的球形突起,其形成器械支架200一部分或在器械支架200主体的任何部分(包括沿第一层240或第二层245)连接至器械支架200。器械支架200也包括第一层240和第二层245,该第一层240和第二层245通过器械引导部225连接,该器械引导部225被配置为保持器械310以进入受试者。可选地,器械引导部225垂直于两层(240、245)或形成预选角度。
在本公开内容的示例性实施方式中,连接第一层240和第二层245的器械支架200的主体260包括用于将器械310插入器械支架200中的入口点220。优选地,第一层240和第二层245之间的距离为5至10厘米,并且理想地为6厘米左右。
在本公开内容的示例性实施方式中,第一层240包括以线的形式的第一层标记205,其表示度量单位(例如,厘米或英寸)的线性刻度。优选地,第一层标记205的线之间的距离为2毫米,其中整个第一层标记205标记的总距离为16毫米。本领域技术人员将理解,第一层标记205的线之间的距离可以是任何距离,只要成像系统可以精确地区分线即可,并且第一层标记205的线之间的距离应相对于第一层240和第二层245之间的距离成比例地变化。第一层标记205(或多个标记)对于成像系统不透明,以识别第一层240并使其相对于第二层245对准。可选地,第一层标记205包括一对或多对箭头255。可选地,所述一对或两对箭头255是三角形的,并且对准,使得它们各自的顶点彼此面对。可选地,一对或两对箭头255位于表示度量单位的线性刻度的线的中线的上方或下方,使得一对或多对箭头255的顶点之间的间隙与表示度量单位的线性刻度的线的中线对准。
在本公开内容的示例性实施方式中,第二层245包括出口点230,器械310从该出口点离开器械支架200,并且包括对成像系统520不透明的第二层标记215,以使成像系统520能够识别第二层245,并且使用户能够将其相对于第一层240对准。优选地,第二层标记215为线形。第一层标记205和第二层标记215由材料,例如可以在成像系统520的显示器上看到的不透射线的材料(例如,金属材料)形成。
在本公开内容的示例性实施方式中,当对准第一层240和第二层245使得器械310在插入受试者中时将与靶标560碰撞时,如在成像系统520的显示器550(参见图6C)上在靶标附近所看到的,第一层标记205被设计为与第二层标记215形成预定义图案。在预定义图案中,第二层标记215将与第一层标记205的中线对准(参见图2C)。优选地,包括第二层标记215的线的厚度与包括第一层标记205的线的厚度不同,以协助用户区分包括第一层标记205和第二层标记215的线。优选地,包括第二层标记215的线比包括第一层标记205的线窄。优选地,在预定义图案中,第二层标记215将在第一层标记205中的一对或两对箭头255之间对准。优选地,在预定义图案中,在第二层标记215与第一层标记205中的一对或两对箭头255的顶点之间存在间隙,以协助用户对准第一层240和第二层245。优选地,在预定义图案中,第二层标记215与第一层标记205中的一对或两对箭头255的顶点之间的间隙为0.1毫米至0.5毫米,并且理想地为0.2毫米。
在本公开内容的示例性实施方式中,存在从第二层245延伸的突起250。可选地,突起250垂直于第二层245或与第二层245形成预选角度。优选地,突起250位于出口点230的周围,器械310从出口点230离开器械支架200。突起250减小器械支架200的出口点230与患者皮肤表面之间的距离,以防止器械310在穿透患者皮肤时弯曲。优选地,在与患者的皮肤表面接触的情况下,为了安全起见,突起250是圆形的。优选地,突起250在2毫米至10毫米,并且理想地在5毫米左右。可选地,器械引导部225通过器械支架200的主体260并且可选地垂直于第一层240和第二层245,或以预选角度将器械310从入口点220引导至出口点230。
图3A是根据本公开内容的示例性实施方式的第二可替选器械支架300的侧视立体图,并且图3B是第二可替选器械支架300的仰视图。如在先前的实施方式中,器械支架300包括手柄335以装配定位臂510。手柄335用于通过定位臂510保持器械支架300或相对于定位臂510旋转器械支架300。手柄335可以是在器械支架300主体的任何部分(包括沿第一层340或第二层345)连接到器械支架300的成对的球形突起。如在先前的实施方式中,器械支架300也包括第一层340和第二层345,它们通过垂直于两层(340、345)并被配置为保持器械310以进入受试者的器械引导部325连接在一起。可选地,第一层340包括用于将器械310插入第一层340的入口点320。同样地,第一层340包括以入口点320为中心的十字形式的第一层标记305。可选地,第一层标记305可以包括一对或多对箭头。可选地,一对或多对箭头是三角形的,并且对准,使得它们各自的顶点彼此面对。可选地,第一层标记305可以包括表示度量单位(例如,厘米或英寸)的线性刻度的一组或多组线。可选地,第一层标记305可以在表示度量单位的线性刻度的一组或多组线上额外包括数值,以指示某些线与表示度量单位的线性刻度的一组或多组线的中线的偏差。
在本公开内容的示例性实施方式中,第二层345包括出口点330(器械310从出口点330离开器械支架300至第二层345),并且包括呈十字形的第二层标记315,其中出口点330位于十字形第二层标记315的中心,以使成像系统520能够识别第二层345,并且使用户能够使其相对于第一层340对准。第一层标记305和第二层标记315由材料,例如可以在成像系统520的显示器上看到的不透射线的材料(例如,金属材料)形成。可选地,器械引导部325通过到达第一层340和第二层345的器械支架300的主体将器械310从入口点320引导至出口点330。可选地,器械引导部325垂直于第一层340和第二层345或形成预定角度。
在本公开内容的示例性实施方式中,当对准第一层340和第二层345使得器械310在插入受试者中时将与靶标560碰撞时,如在成像系统520的显示器550上所看到的,第一层标记305被设计为与第二层标记315重合,在靶标上方形成十字。
备选地,当对准第一层340和第二层345使得器械310在插入受试者中时将与靶标560碰撞时,如在成像系统520的显示器550上所看到的,第一层标记305被设计为与第二层标记315形成预定义图案。可选地,在预定义图案中,第二层标记315的每条线将在第一层标记305的一对或多对箭头之间对准,并且在第二层标记315的线和第一层标记305的箭或箭头的顶部之间存在间隙。可选地,在预定义图案中,第二层标记315的每条线将与表示第一层标记305的度量单位的线性刻度的一组或多组线的每条线的中线对准。
图3C至图3D是根据本公开内容的示例性实施方式的在第二可替选器械支架300上的标记示例的图示,并且图3E是由在第二可替选器械支架300上的示例性标记形成的预定义图案的图示。图3C是被实现作为图3A的第一层标记305的标记的第一示例,其包括四对三角形箭头,每对三角形箭头被对准,使得它们各自的顶点以径向布置彼此面对。图3D是被实现作为第二层标记315的标记的第二示例,其包括十字准线标记。图3E示出了在对准本公开内容的装置的过程中,如在成像系统520的显示器550上所看到的,由实施第一示例和第二示例(图3C、图3D)的第一层标记305和第二层标记315形成的预定义图案。如可以看出,根据第一示例和第二示例,第二层标记315的十字准线的线在第一层标记305的四对箭头的每对之间对准。
图3F至图3G是根据本公开内容的示例性实施方式的在第二可替选器械支架300上的标记的其他示例的图示,并且图3H是由第二可替选器械支架300上的示例性标记形成的预定义图案的图示。图3F是被实现作为图3A的第一层标记305的标记的第三示例,其包括四对三角形箭头,每对三角形箭头被对准,使得它们各自的顶点以径向布置和正方形彼此面对,其中两组线表示正方形的两个相邻边上的度量单位的线性刻度,两组线中的每组的中线表示位于正方形的至少两个相邻边上的成对三角形箭头的顶点之间对准的度量单位的线性刻度。图3G是被实现作为第二层标记315的标记的第四示例,其包括十字准线标记。图3H示出了在对准本公开内容的装置的过程中,如在成像系统520的显示器550上所看到的,由实施第三示例和第四示例(图3F和图3G)的第一层标记305和第二层标记315形成的预定义图案。如可以看出,根据第三示例和第四示例,第二层标记315的十字准线的线在第一层标记305的四对箭头的每对之间并且与表示第一层标记305的度量单位的线性刻度的两组线的每条线的中线对准。
图4A是根据本公开内容的示例性实施方式的第三可替选器械支架400的仰视立体图,图4B是第三可替选器械支架400的俯视立体图,并且图4C是第三可替选器械支架400的俯视图。如在先前的实施方式中,器械支架400包括手柄435以装配定位臂510。手柄435用于通过定位臂510保持器械支架400或相对于定位臂510旋转器械支架400。手柄435可以是在器械支架400的主体的任何部分(包括沿第一层440或第二层445)连接到器械支架400的成对的球形突起。如在先前的实施方式中,器械支架400也包括第一层440和第二层445,它们通过柱460连接在一起。优选地,存在从第二层445延伸的突起450。优选地,在与患者的皮肤表面接触的情况下,为了安全起见,突起450是圆形的。优选地,突起450为2毫米至10毫米,并且理想地为5毫米左右。可选地,突起450垂直于第二层445或与第二层445形成预选角度。可选地,柱460垂直于两层(440、445)。柱460可以是任何形状,包括直线或圆形。
在本公开内容的示例性实施方式中,第二层445包括用于插入器械310的入口点420、供器械310离开器械支架400的出口点430、以及引导器械310从入口点420到出口点430的器械引导部425。第一层440包括第一层标记405。第一层标记405由材料,例如可以在成像系统520的显示器上看到的不透射线的材料(例如,金属材料)形成。可选地,第一层标记405是以表示度量单位(例如,厘米或英寸)的线性刻度的线的形式。可选地,第一层标记405也包括一对或多对箭头455。
在本公开内容的示例性实施方式中,器械310由材料,例如可以在成像系统520的显示器上看到的不透射线的材料(例如,金属材料)形成。一旦插入到器械支架400中,器械310就使成像系统能够识别第二层445,并使用户能够将其相对于第一层440对准。优选地,当器械310与第一层标记405的中线对准时,第二层445相对于第一层440对准。优选地,当器械310在第一层标记405中的一对或两对箭头455之间对准时,第二层445相对于第一层440对准。优选地,当第一层440与第二层445对准时,在器械310和第一层标记405中的一对或两对箭头455的顶点之间存在间隙。优选地,器械310与第一层标记405中的一对或两对箭头455的顶点之间的间隙为0.1毫米至0.5毫米,并且理想地为0.2毫米。
在本公开内容的示例性实施方式中,第一层标记和第二层标记可以反之亦然,并且不限于箭头和线或十字。它们可以是任何一种二维几何形状,包括但不限于圆形/半圆形、三角形、正方形、矩形、多边形、椭圆形等,只要其可以适当地用于对准和匹配即可。
此外,两层的标记可以对准,以建立穿过所有标记的公共轴线。标记还可以对准器械和靶标,使得所有三个(标记、器械、靶标)将位于同一轴线上。在建立轴线时,器械被设置为遵循仅沿该轴线移动。
图5A至图5G是根据本公开内容的示例性实施方式的对准器械支架100的过程的示意图。在本公开内容的示例性实施方式中,如图5A所示,受试者505被置于手术台530上,其中器械支架100被安装在受试者505上方的定位臂510上。定位臂510通常被附接到手术台530,并且成像系统520最初以相对于竖直方向呈角度α定位。在成像系统520的帮助下,从业者察看显示器550,并选择相对于α的成角度平面(例如,以角度X),这将使器械310能够最佳插入以击中靶标560(例如,肾结石)。此外,从业者选择穿刺角度,使器械310在选定的成角度平面中倾斜,以准确地击中靶标560。
在本公开内容的示例性实施方式中,从业者将成像系统520旋转至所需角度(X+α),并察看如在显示器550上出现的器械支架100。
如图5B所示,从业者使用定位臂510将器械支架100的第一层标记105对准,以指向靶标560,并且位于第二层标记115的中心。可选地,第一层标记105为线的形式,并且第二层标记115为两对箭头的形式。当器械支架100与所选平面对准时,第一层标记105的线将居中地在第二层标记115的箭头之间。
如图5C所示,从业者将器械310(例如,空心针)插入器械支架100中。最初,器械310是不可见的,因为它垂直于第一层标记105,并且未对准以准确地通过靶标。
如图5D所示,从业者在受试者505的皮肤上确定入口点,并用器械支架100旋转器械310,使其与入口点对准。然后,从业者将器械310插入受试者505的皮肤约3mm,以建立枢转点。或者,从业者可以将器械310停在受试者505皮肤上的入口点的正上方,并且在稍后阶段仅插入器械。
如图5E所示,从业者将成像系统520返回至α度位置,以验证器械310指向靶标。可选地,当用成像系统520从α角度察看时,器械310或其虚拟延伸线可以被识别为未通过靶标。
如图5F所示,将定位臂510向前或向后移动以倾斜器械支架100和器械310,使得器械310将与靶标560对准,或者使得器械的延伸线将与靶标560对准。
如图5G所示,一旦将器械310在3D上对准靶标,从业者就可以察看显示器550,并将器械310轻轻推向靶标560,直到器械310击中靶标560。可选地,器械可以用于破碎靶标和/或从患者体内将其真空吸除。
图6A至图6F是根据本公开内容的示例性实施方式的对准器械支架200的第一可替选过程的示意图。在本公开内容的示例性实施方式中,如图6A所示,受试者505被置于手术台530上,其中器械支架200被安装在受试者505上方的定位臂510上。
定位臂510通常被附接到手术台530,并且成像系统520最初以相对于竖直方向呈角度α定位。在成像系统520的帮助下,从业者察看显示器550,并选择相对于α的成角度平面(例如,以角度X),这将使器械310能够最佳插入以击中靶标560(例如,肾结石)。此外,从业者选择穿刺角度,使器械310在选定的成角度平面中倾斜,以准确地击中靶标560。
在本公开内容的示例性实施方式中,从业者将成像系统520旋转至所需角度(X+α),并察看如在显示器550上出现的器械支架200。或者,如果器械支架400被安装在定位臂510上,从业者将成像系统520旋转到所需角度(X+α),将器械310插入器械支架400,并察看如在显示器550上出现的器械支架400和器械310。
从业者用成像系统520拍摄快照,该快照清楚地显示靶标560、器械支架200的第一层标记205和器械支架200的第二层标记215。或者,如果使用器械支架400,从业者使用成像系统520拍摄快照,该快照显示靶标560、器械支架400的第一层标记405和器械支架400内的器械310。
从业者读取器械支架200的第二层标记215与器械支架200的第一层标记205的中线和靶标560的偏差。或者,如果使用器械支架400,从业者读取器械支架400内的器械310与器械支架400的第一层标记405的中线的偏差。
如图6B所示,从业者可以使用偏差作为引导来移动定位臂510,以对准器械支架200的第二层标记215,以指向靶标560,并且位于第一层标记205的中心。可选地,第二层标记215是以线的形式,并且第一层标记205是以表示度量单位(例如,厘米或英寸)的线性刻度的线的形式。当器械支架200与所选平面对准时,第二层标记215的线将居中地位于第一层标记205的中线上。
或者,如果使用器械支架400,从业者使用偏差作为引导来移动定位臂,使器械310在器械支架400内对准,以指向靶标,并且位于第一层标记405的中心。可选地,第一层标记405是以表示度量单位(例如,厘米或英寸)的线性刻度的线的形式。可选地,第一层标记405也包括一对或多对箭头。当器械支架400与所选平面对准时,器械支架400内的器械310将居中地位于第一层标记405的中线上。
如图6C所示,从业者将器械310(例如,空心针)插入器械支架200中,在受试者505的皮肤上确定入口点,并且用器械支架200旋转器械310,使其与入口点对准。然后,从业者将器械310插入受试者505的皮肤约3mm,以建立枢转点。或者,从业者可以将器械310停在受试者505皮肤上的入口点的正上方,并且在稍后阶段仅插入器械310。
如图6D所示,从业者将成像系统520返回至α度位置,以验证器械310指向靶标。可选地,当用成像系统520从α角度察看时,器械310或其虚拟延伸线可以被识别为未通过靶标。
如图6E所示,将定位臂510向前或向后移动以倾斜器械支架200和器械310,使得器械310将与靶标560对准,或者使得器械的延伸线将与靶标560对准。
如图6F所示,一旦将器械310在3D上对准靶标,从业者就可以察看显示器550,并将器械310轻轻推向靶标560,直到器械310击中靶标560。可选地,器械可以用于破碎靶标和/或从患者体内将其真空吸除。
图7A至图7D是根据本公开内容的示例性实施方式的对准第二可替选器械支架300的第二可替选过程的示意图。在本公开内容的示例性实施方式中,从业者选择穿刺角度、插入点780并且在受试者505的皮肤上标记插入点780。图7A示出了具有相对于插入点780的轴线的坐标系770。轴线包括颅部方向(头端)、尾部方向(后端)、内侧方向(受试者的中心)和外侧方向(相对于受试者入口点的外端)。在本公开内容的示例性实施方式中,从业者在正中面(颅部-尾部)和横向平面(内侧-外侧)两者中旋转成像系统520,以与显示器550中的插入点780和靶标560对准。从业者还配置其上安装有器械支架300的定位臂510,以使器械310朝向靶标560对准。定位臂510被设计为具有多个自由度,使得器械支架300可以沿任何方向定向。同样地,关节臂包括各种锁定旋钮790,以锁定定位臂510的元件,并防止它们在将器械310推入受试者505的体内之前移动。
如图7B所示,从业者移动定位臂510,以将器械支架300的第一层标记305与第二层标记315对准,其中使标记的插入点780和靶标560尽可能准确。
如图7C所示,从业者可以使用定位臂510的特征来微调器械310相对于靶标560的位置,然后锁定定位臂510,使得当通过器械支架300将器械310推入受试者505的体内时,器械310可以被保持稳定并且不会未对准。
如图7D所示,一旦器械支架300和器械310对准,从业者就可以推动器械310以经皮到达靶标并对其进行处理。例如,提取肾结石或递送药物。
应理解,上述方法和装置可以以许多方式发生变化,包括省略或增加步骤、改变步骤顺序和所用装置的类型。应理解,不同的特征可以以不同的方式组合。特别地,在本公开内容的每个实施方式中,在特定实施方式中以上所示的所有特征并非都是必需的。以上特征的进一步组合也被认为在本公开内容的一些实施方式的范围内。
本领域技术人员将理解,本发明不限于上文特别示出和描述的内容。相反,本发明的范围仅由所附权利要求书限定。
- 用于引导作业器械的引导装置以及带有引导装置的土壤压实装置
- 用于引导器械的装置和方法