一种智能采茶机器人
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及一种智能采茶机器人,属于机器人技术领域。
技术背景
茶叶是我国重要的经济作物,茶产业在国民经济中具有重要地位,我国许多茶叶的产量都居于世界前列。茶芽采摘是茶叶生产中最耗时、最费力的环节。
由于茶芽采摘具有季节性较强、作业时间短、作业环境差、劳动强度大的特点,在采茶时令来临前招募采茶工会很困难,若长期雇用采茶工则会导致人工投入成本过高。目前,茶芽收获期间需要投入的劳动力约占整个生产过程的80-90%,人工成本投入高且效率低下。
此外,名优茶叶采摘对采法要求更高,名优茶均取自茶树的嫩芽,通常为单芽或者一芽一叶,采摘茶芽时需用捏住芽叶向上提拔的方法,不可以用指甲掐断的方式采摘茶芽,如果新芽在抓取机构内的方向倾斜,在抓取并提拔过程中新芽破坏率高,所以抓取机构的位置调节精确性非常重要,传统采茶机器人不满足精确性的要求,采摘出来的茶叶品相参差不齐,无法达到名优茶的标准。故高端茶叶的采摘严重依赖于手工。
以上因素给茶芽的收获带来了极大的困难。因此,亟需一种采茶设备用于保证名优茶叶品质,同时提高茶叶采摘效率,以代替人工和传统的机械设备进行采茶。
发明内容
本发明的目的是提供一种智能采茶机器人,实现采茶过程的对机械臂的精确调节,保证夹爪对新芽的抓取方向准确。
本发明的技术方案通过如下方式实现:
一种智能采茶机器人,所述的采摘执行装置包括升降机构、旋转机构和机械臂;所述的升降机构固定在行走装置上,旋转机构固定在升降机构上,机械臂与旋转机构滑动连接。
作为本发明更优的技术方案:所述的采摘执行装置还包括滑轨,滑轨固定旋转机构上,机械臂固定在滑轨的滑动件上。
作为本发明更优的技术方案:所述的机械臂末端连接有抓取机构。所述的抓取机构位软体夹爪。
作为本发明更优的技术方案:所述的行走模块为AGV小车。
作为本发明更优的技术方案:所述的行走模块上安装有激光雷达。
作为本发明更优的技术方案:所述的升降机构为剪叉式升降平台,所述的剪叉式升降平台的下平台连接在行走装置上,其上平台与旋转机构连接。
作为本发明更优的技术方案:所述的旋转机构为电动转台,所述的电动转台通过法兰于滑轨上的滑轨固定座连接,电动转台的底座与上平台固定连接。
作为本发明更优的技术方案:所述的行走模块上安装有蓄电池和主控计算机。
作为本发明更优的技术方案:所述的升降机构的升降台电机、旋转机构的电动转台电机和滑轨的滑轨电机、机械臂的机械臂电机、图像识别装置均与控制器连接。
作为本发明更优的技术方案,所述的图像识别装置位深度相机。
有益效果如下:
本发明的将采摘执行装置搭载在AGV上,通过升降机构、旋转机构和机械臂的连接配合实现采茶过程精确调节,尤其适用于名优茶叶采摘,保证抓取机构对新芽的抓取方向准确,进而保证茶叶的品质,适应不同高度,不同位置的茶树,并且占地面积小,结构简单,可靠性高。
附图说明
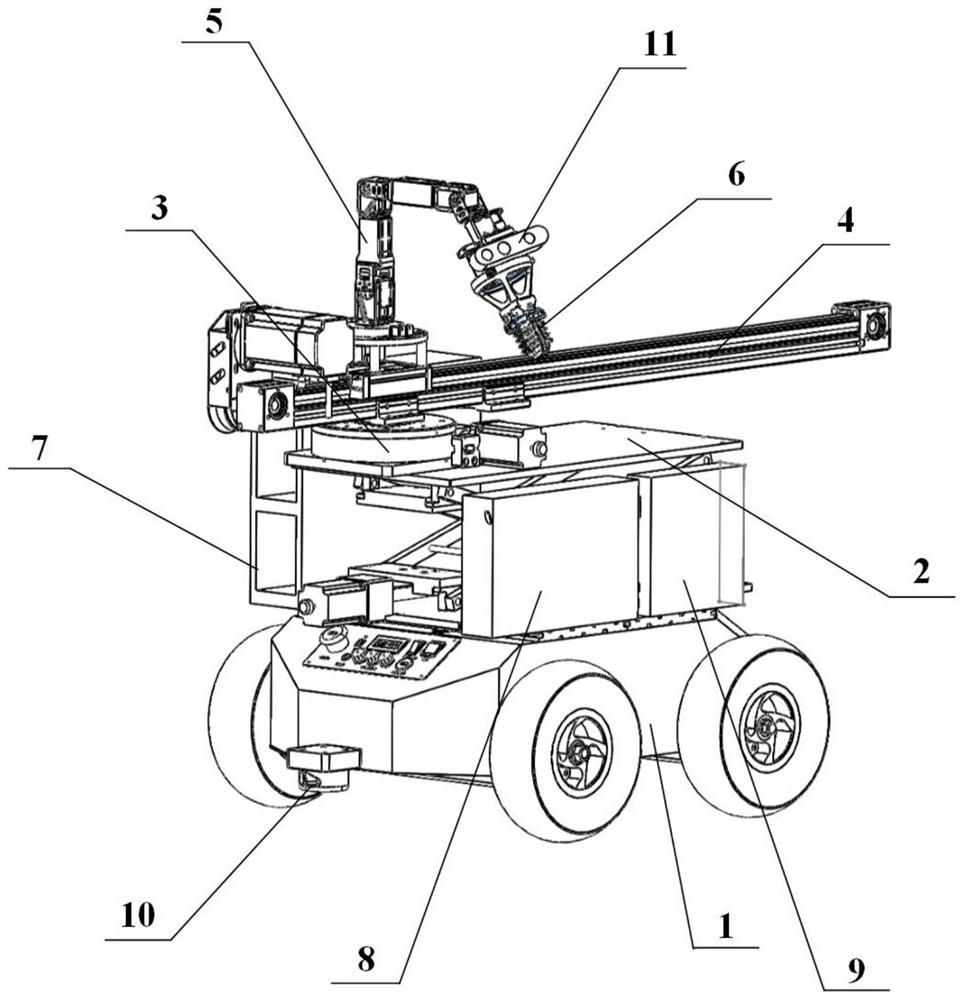
图1是本发明的智能采茶机器人的结构示意图;
图2是本发明的智能采茶机器人的升降机构的结构示意图;
图3是本发明的智能采茶机器人的旋转机构的结构示意图;
图4是本发明的智能采茶机器人的滑轨的结构示意图;
图5是本发明的智能采茶机器人的机械臂的结构示意图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明具体实施例及相应的附图对本发明技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
下面结合附图和实施例对本发明进一步详细的说明。
如图1所示,本发明提供一种智能采茶机器人,包括行走装置1、采摘执行装置和图像识别装置11,所述的图像识别机构11设置在采摘执行机构上;所述的采摘执行装置包括升降机构2、旋转机构3和机械臂5;所述的升降机构2固定在行走装置1上,旋转机构3固定在升降机构2上,机械臂5与旋转机构3滑动连接。所述的采摘执行装置还包括滑轨4,滑轨4固定旋转机构3上,机械臂5固定在滑轨4的滑动件18上。
所述的采摘执行装置中的升降机构3作用是采摘茶芽时将采茶机器人的作业平台升至茶蓬的高度,并在茶芽采摘工作结束时将上部机械臂5等设备收回至起始位置;当采茶机器人的作业平台上升至茶蓬高度后,旋转机构3进行旋转并带动滑轨4移至茶蓬正上方;如图4所示,直线导轨20上安装的滑动件18,如图5所示,固定连接六自由度机械臂5的底座21(参见图5),机械臂本体23末端通过固定块24与抓取机构6连接,当进行茶芽采摘时,机械臂5沿滑轨方向在茶蓬上方完成茶芽采摘工作;采用机械臂5末端固定抓取机构6为软体夹爪,可使设备在采摘茶芽时能够模仿人采摘茶芽时的提拔动作,而非掐断茶芽,破坏茶芽品相。
本发明的智能采茶机器人工作过程为:AGV搭载采摘执行装置行驶至茶垄头处;升降机构带动机械臂上的夹爪上升至茶蓬位置,旋转机构带动滑轨旋转至茶蓬上方,机械臂沿平移滑轨回归至初始位置,机械臂调整到初始位姿,柔性软体夹爪泄压;夹爪到达茶芽位置后开始茶芽采摘,夹爪夹取茶芽,并进行提采茶芽,茶芽收集装置吸取被采下来的茶芽,将其回收到茶芽收集箱内。
在一些实施例中:图像识别装置11为深度相机,该深度相机固定于机械臂5的末端侧面,当采茶机器人准备工作就绪后,打开相机进行茶芽图像采集,结合图像处理中的目标检测识别算法,来检测识别出图像中的茶叶嫩芽,并定位茶芽的坐标位置,再结合跟踪算法来指导夹爪到达茶芽位置,进而完成后续的采摘工作。
在一些实施例中:所述的抓取机构6为软体夹爪。
在一些实施例中:所述的行走模块1为AGV小车。智能采茶机器人行走主要由激光导航AGV小车实现。AGV小车前后各配有一个激光雷达10,结合SLAM重建的算法,使小车能够在茶垄间进行无人导航行走。
在一些实施例中:如图2所示,所述的升降机构2为剪叉式升降平台,所述的剪叉式升降平台的下平台26连接在行走装置1上,其上平台25与旋转机构3连接。
在一些实施例中:如图3所示,所述的旋转机构3为电动转台,所述的电动转台通过法兰15与滑轨4上的滑轨固定座17连接,电动转台的底座14与上平台25固定连接。
在一些实施例中:所述的行走模块1上安装有主控计算机9。AGV小车上方中间位置搭载升降机构,升降机构左侧固定着智能采茶设备的控制箱。主控计算机9通过向控制器7发送串口命令,来实现对采茶机器人采摘执行装置的控制。
在一些实施例中:所述的行走模块1上安装有蓄电池8,智能采茶机器人中的激光导航AGV小车与小车上部的采摘执行装置独立供电。采茶机器人的车体内和车上方各配有一块蓄电池,分别用来给AGV和车上方的采茶设备供电。此外小车控制面板也配有供电口,当小车上部的电池电量耗尽后,可用小车继续给上方的采摘执行装置继续供电,尽可能增大了智能采茶机器人的续航能力。
在一些实施例中:所述的升降机构2的升降台电机12、旋转机构3的电动转台电机16和滑轨4的滑轨电机19、机械臂5的机械臂电机22、图像识别装置11均与控制器7连接。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 一种智能采茶机器人及应用其采茶的方法
- 一种智能采茶机器人及其采茶方法