一种有自动上纸管功能的自动落筒机器人
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及涤纶长丝运输技术领域,尤其涉及一种有自动上纸管功能的自动落筒机器人。
背景技术
我国涤纶长丝的产量逐年提高,作为涤纶长丝关键的生产设备卷绕机的使用数量在不断增加,生产速度也在不断提高,现在先进的卷绕头卷绕速度已经可以达到6000m/min,今后还会往更快的方向发展,卷绕机的卷绕夹头在20世纪80年代以前,夹头长度局限于60毫米之内,20世纪90年代以后,夹头长度从900、1200、1400毫米增大到了1500-1600毫米,夹头的长度越长,可以安装的纸管数量就越多,从而可以同时卷绕更多根丝条,正是由于卷绕机的上述发展特点,人工处理卷装越来越难以跟上生产的节奏且难以保证产品的质量;因此国内涤纶长丝生产企业正逐步减小对劳动力的依赖,大量使用自动化运输系统。
自动落筒机器人是自动化运输系统的重要组成部分,现有技术的自动落筒机器人,只能先由自动落筒机器人的承接杆完成落丝及卷装卸载功能之后,再由承接杆去承接纸管,最后由承接杆完成上纸管工序,这样就导致自动落筒机器人在完成落丝之后,还需要进行卷装的卸载,才可以对自动落筒机器人进行上纸管,再次经过转运,再次和卷绕机锭轴对中,最后才可以完成对刚刚发出满卷信号的,已经完成落丝的卷绕机进行上纸管,来回的运动不仅加重了自动落筒机器人工作频率,也同时降低了卷绕机的工作效率。
发明内容
针对现有技术中所存在的不足,本发明提供了一种有自动上纸管功能的自动落筒机器人,其解决了现有技术没有一种能在完成落丝承接后马上进行上纸管自动落筒机器人的技术问题。
根据本发明的实施例记载的一种有自动上纸管功能的自动落筒机器人,包括天轨系统、安装在天轨系统上的悬臂框架与安装在悬臂框架上的承接机构,所述悬臂框架一侧设有的上纸管机构,所述上纸管机构包括:
移动基座,与所述承接机构连接,进而移动基座能跟随承接机构一起沿悬臂框架运动;
纸管侧挡基座,安装在所述移动基座上,且与所述移动基座之间安装有一级驱动装置,所述一级驱动装置能带动纸管侧挡基座沿移动基座长度方向做直线运动;
纸管推座,安装在所述纸管侧挡基座上,且与所述纸管侧挡基座之间安装有二级驱动装置,所述二级驱动装置能带动纸管推座沿移动基座长度方向做直线运动。
进一步的,所述移动基座上并排安装有至少一个纸管侧挡基座。
进一步的,所述悬臂框架水平安装有若干个移动基座。
进一步的,所述移动基座上设有沿移动基座长度方向设置的一级滑轨,所述纸管侧挡基座安装在一级滑轨上,所述一级驱动装置包括一级电机与一级齿条,所述一级齿条沿移动基座长度方向安装在移动基座上,所述一级电机安装在纸管侧挡基座上,所述一级电机与一级齿条通过齿轮啮合连接。
进一步的,所述纸管侧挡基座由一块挡板分为储存空间与二级移动空间,所述储存空间用于放置纸管,所述移动空间用于安装二级驱动装置,所述纸管侧挡基座一端还设有采用一块隔板隔离出一级移动空间,所述一级驱动装置安装在一级移动空间内。
进一步的,所述储存空间内对称设置有两块倾斜的定位板,所述储存空间靠近一级驱动装置一端设有停止块。
进一步的,所述移动空间的挡板侧设有沿移动基座长度方向设置的二级滑轨,所述纸管推座安装在二级滑轨上,所述二级驱动装置包括二级电机与二级齿条,所述二级齿条沿移动基座长度方向安装在移动空间的侧壁上,所述二级电机安装在纸管推座上,所述二级电机与二级齿条通过齿轮啮合连接。
进一步的,所述纸管推座包括L形板与纸管推块,所述纸管推块安装在L形板一侧,所述L形板安装在二级滑轨上,所述二级电机固定在L形板上。
进一步的,所述移动基座上覆盖有防护罩,所述防护罩和承接机构通过连接件连接。
进一步的,每个所述移动基座上覆盖有防护罩,所述防护罩和承接机构或响铃的防护罩之间通过连接件连接。
本发明的技术原理为:在悬臂框架一侧的上纸管机构,在承接机构完成承接后,天轨系统平移一定距离,使得上纸管机构直接对正卷绕头,然后通过一级驱动装置驱动纸管侧挡基座靠近卷绕头,然后由二级驱动装置驱动纸管推座推动放置在纸管侧挡基座上的纸管,让纸管被推入卷绕头,完成上纸管,然后卷绕机即可继续工作。
相比于现有技术,本发明具有如下有益效果:采用上纸管机构与承接机构和天轨系统与悬臂框架的配合工作,达到了完成承接之后,马上进行上纸管,其解决了现有技术没有一种能在完成落丝承接后马上进行上纸管自动落筒机器人的技术问题,提高了卷绕机工作效率和降低了自动落筒机器人工作频率的技术效果。
附图说明
图1为本发明实施例1的自动落筒机器人结构示意图。
图2为本发明实施例1的滑轮连接结构示意图。
图3为本发明实施例1的上纸管机构结构示意图。
图4为本发明实施例1的上纸管机构后视图。
图5为本发明实施例1的移动基座俯视图。
图6为本发明实施例1的纸管侧挡基座结构示意图。
图7为本发明实施例的防护罩连接结构示意图。
图8为本发明实施例2的自动落筒机器人结构示意图。
图9为本发明实施例3的自动落筒机器人结构示意图。
图10为本发明实施例4的自动落筒机器人结构示意图。
上述附图中:100、天轨系统;110、地轨系统;111、滑轮;120、水平传动机构;200、悬臂框架;210、竖直轨道;220、竖直驱动机构;300、承接机构;400、上纸管机构;410、移动基座;411、一级滑轨;412、防护罩;413、连接件;420、纸管侧挡基座;421、挡板;422、储存空间;422-1、定位板;422-2、防撞块;423、二级移动空间;423-1、二级滑轨;424、隔板;424-1、距离传感器;425、一级移动空间;430、一级驱动装置;431、一级电机;432、一级齿条;440、纸管推座;441、L形板;442、纸管推块;450、二级驱动装置;451、二级电机;452、二级齿条。
具体实施方式
下面结合附图及实施例对本发明中的技术方案进一步说明。
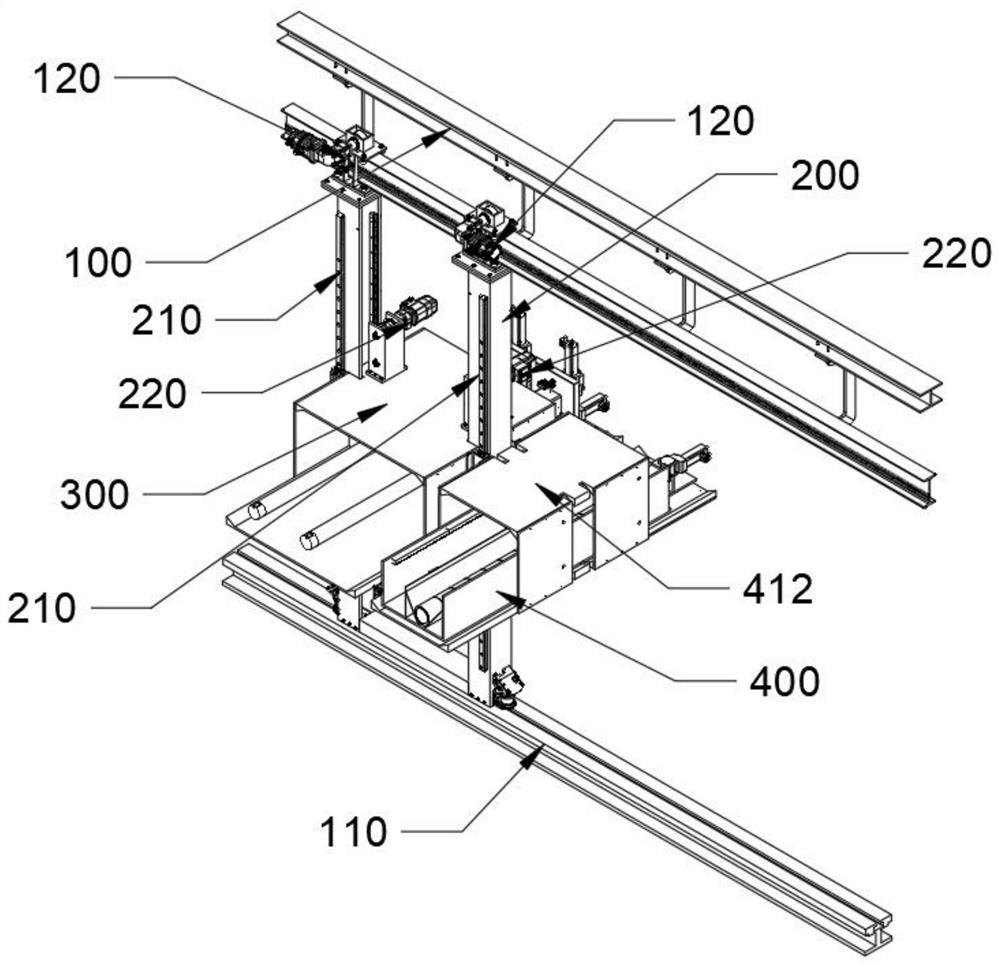
如图1所示的有自动上纸管功能的自动落筒机器人,包括天轨系统100、安装在天轨系统100上的悬臂框架200与安装在悬臂框架200上的承接机构300,悬臂框架200一侧设有的上纸管机构400。
具体的如图1-2所示,悬臂框架200下侧还设置有地轨系统110,地轨系统110与天轨系统100平行,悬臂框架200与天轨系统100之间安装有水平传动机构120,使得水平传动机构120能带动整个悬臂框架200沿天轨系统100长度方向做往复运动,悬臂框架200与地轨系统110之间采用滑轮111连接,起到稳定整个悬臂框架200的作用。
如图1所示,悬臂框架200为方形框体,悬臂框架200竖直方向上设有竖直轨道210,承接机构300两侧分别与竖直轨道210连接,使得承接机构300能沿竖直轨道210方向做往复运动,悬臂框架200与承接装置之间安装有竖直驱动机构220,用于承接机构300的竖直移动。
实施例1
如图3所示的上纸管机构400包括:
移动基座410与承接机构300连接,进而移动基座410能跟随承接机构300一起沿悬臂框架200运动。
一个纸管侧挡基座420安装在移动基座410上,且与移动基座410之间安装有一级驱动装置430,一级驱动装置430能带动纸管侧挡基座420沿移动基座410长度方向做直线运动。
纸管推座440安装在纸管侧挡基座420上,且与纸管侧挡基座420之间安装有二级驱动装置450,二级驱动装置450能带动纸管推座440沿移动基座410长度方向做直线运动。
具体的如图4-5所示,移动基座410上螺钉固定有沿移动基座410长度方向设置的一级滑轨411,纸管侧挡基座420安装在一级滑轨411上,使得纸管侧挡基座420能沿一级滑轨411方向滑动,一级驱动装置430包括一级电机431与一级齿条432,其中一级齿条432沿移动基座410长度方向螺钉安装在移动基座410上,一级电机431螺钉安装在纸管侧挡基座420上,一级电机431与一级齿条432通过齿轮啮合连接,即一级电机431的转轴上键连接齿轮,齿轮与一级齿条432啮合,使得一级电机431能驱动整个纸管侧挡基座420沿一级滑轨411方向运动。
如图6所示,纸管侧挡基座420由一块挡板421分为储存空间422与二级移动空间423,储存空间422用于放置纸管,移动空间用于安装二级驱动装置450,纸管侧挡基座420一端焊接固定有隔板424隔离出一级移动空间425,一级驱动装置430的一级电机431安装在一级移动空间425内。
如图6所示,储存空间422内焊接固定有对称设置的两块倾斜的定位板422-1,储存空间422靠近一级驱动装置430一端螺钉固定有防撞块422-2,用于对纸管进行限位,隔板424上胶固定有距离传感器424-1,用于二次检验纸管是否完全卸载。
如图6所示,移动空间的挡板421侧螺钉固定有沿移动基座410长度方向设置的二级滑轨423-1,纸管推座440安装在二级滑轨423-1上,使得纸管推座440只能沿二级滑轨423-1方向滑动,二级驱动装置450包括二级电机451与二级齿条452,其中二级齿条452沿移动基座410长度方向采用螺钉安装在移动空间的侧壁上,二级电机451螺钉安装在纸管推座440上,二级电机451与二级齿条452通过齿轮啮合连接,即二级电机451的转轴上键连接齿轮,齿轮与二级齿条452啮合,使得二级电机451能驱动整个纸管推座440沿二级滑轨423-1方向运动。
一级电机431与二级电机451都为步进电机,通过步进电机让纸管侧挡基座420与纸管推座440进行准确的距离移动,然后通过测距传感器进行二次校验,避免因为磨损造成的移动距离不准确的情况。
如图4所示,纸管推座440包括L形板441与纸管推块442,其中纸管推块442一体成型在L形板441一侧,L形板441安装在二级滑轨423-1上,二级电机451螺钉固定在L形板441上,纸管推块442能推动纸管至卷绕头上。
如图7所示,移动基座410上覆盖有防护罩412,即防护罩412采用螺钉固定在移动基座410上,防护罩412和承接机构300通过连接件413连接,具体为防护罩412和承接机构300通过螺栓穿过连接件413固定。
实施例2
如图8所示,本实施例与实施例1的区别在于:悬臂框架200水平安装有至少两个移动基座410,且移动基座410都设置在悬臂框架200一侧,防护罩412和相邻的防护罩412之间也通过连接件413连接。
实施例3
如图9所示,本实施例与实施例1的区别在于:移动基座410上并排安装有至少两个纸管侧挡基座420。
实施例4
如图10所示,本实施例与实施例1的区别在于:悬臂框架200水平安装有至少两个移动基座410,且移动基座410对称设置在悬臂框架200两侧。
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种有自动上纸管功能的自动落筒机器人
- 一种有自动上纸管功能的自动落筒机器人