信息处理装置、信息处理方法和程序
文献发布时间:2023-06-19 19:20:08
技术领域
本技术涉及信息处理装置、信息处理方法和程序,并且即使当在移动体的可通过区域改变的环境中移动体的密度增加时,也能够有效地操作移动体。
背景技术
在相关技术中,使用移动体的系统已经用于各种目的,例如物品的输送、设施的检查、安全等。为了使移动体移动,必须在不与环境上的静态障碍物和动态障碍物(包括其他移动机器人)碰撞的情况下到达目的地。因此,例如,在专利文献1中,指示多个机器人操作的任意环境的地图的生成和更新以及由环境中的一个或多个机器人使用的数据的提供由管理器执行。
引用列表
专利文献
专利文献1:WO 2009/102970 A
发明内容
本发明要解决的问题
顺便说一句,在由现有方法生成的路线地图中,不可能确定彼此通过是否可能。因此,例如,在另一移动体在狭窄的直线道路上从相反方向接近的情况下,或者在正交的狭窄交叉路口处,另一移动体突然出现并且同时从侧面进入交叉路口的情况下,出现两个移动体不能彼此面对同时移动的情况(也称为失速)。
本技术的目的是提供一种信息处理装置、信息处理方法和程序,即使当在移动体的可通过区域改变的环境中移动体的密度增加时,也能够有效地操作移动体。
问题的解决方案
根据本技术的第一方面,提供了一种信息处理装置,该信息处理装置包括路线地图生成单元,该路线地图生成单元被配置成在存在障碍物的环境中,在可移动区域(即,移动体能够移动的区域)中的障碍物之间,设置由具有距障碍物中的两个不同障碍物相等距离的点群形成的边界线,以及根据从障碍物中的每一个到边界线的距离以及在环境中移动的移动体的尺寸来针对边界线确定车道的数目。
在该技术中,在存在障碍物的环境中,路线地图生成单元对可移动区域(即,移动体能够移动的区域)执行例如Voronoi区域划分,设置由具有距障碍物之间的障碍物相等距离的点群形成的边界线,根据距障碍物的距离和在障碍物之间移动的移动体的尺寸来针对边界线确定车道的数目,以及基于边界线和针对边界线确定的车道的数目来生成具有车道数目信息的路线地图。车道的数目与可以同时通过的移动体的数目对应,并且移动体的尺寸是垂直于移动方向的移动体宽度的最大值,并且可以包括余量。
路线地图生成单元在边界线的分支点和端点处以及边界线的车道数目的变化点处设置节点,并且在节点之间的距离短于第一阈值的情况下,在节点之间设置新的一个节点来代替节点之间的距离短于第一阈值的两个节点。此外,在节点之间的距离大于比第一阈值大的第二阈值的情况下,路线地图生成单元在节点之间的边界线上新设置节点,并且通过新设置的节点将节点之间的边缘划分为边缘。此外,在节点之间的边缘与边界线之间的最大分隔距离大于分隔距离阈值的情况下,路线地图生成单元在节点之间的边界线上新设置节点,并且通过新设置的节点将节点之间的边缘划分为边缘。路线地图生成单元将针对边界线确定的车道的数目设置为与边界线对应的边缘的车道数目信息,并且将连接至节点的边缘中的最小车道数目设置为节点的车道数目信息,并且生成拓扑图作为路线地图,在拓扑图中,节点通过边缘连接并且具有车道数目信息。此外,路线地图生成单元可以提供与针对边界线确定的车道的数目对应的边缘,并且在边缘的相对端处设置节点,以生成其中节点和边缘的车道的数目为1的车道地图作为路线地图。路线地图生成单元根据可移动区域的变化来更新路线地图。
此外,信息处理装置还包括路线计划单元,其通过使用具有车道数目信息的路线地图来计划移动体的路线,并且路线计划单元为每个移动体计划路线,使得移动体的数目不超过由车道数目信息指示的车道的数目。此外,路线地图生成单元可以通过使用与具有不同尺寸的多个移动体对应的基本车道宽度来确定车道的数目作为移动体的尺寸,并且路线计划单元可以通过使用具有由具有多个不同尺寸的每个移动体占用的基本车道宽度的车道的数目来计划路线。
根据本技术的第二方面,提供了一种信息处理方法,包括:在存在障碍物的环境中,在可移动区域(即,移动体能够移动的区域)中的障碍物之间,设置由具有距障碍物中的两个不同障碍物相等距离的点群形成的边界线;以及根据从障碍物中的每一个到边界线的距离以及在环境中移动的移动体的尺寸来针对边界线确定车道的数目。
根据本技术的第三方面,提供了一种使计算机生成路线地图的程序,该程序使计算机执行:
在存在障碍物的环境中,在可移动区域(即,移动体能够移动的区域)中的障碍物之间,设置由具有距障碍物中的二个不同的障碍物相等距离的点群形成的边界线的步骤;
根据从障碍物中的每一个到边界线的距离和在环境中移动的移动体的尺寸,针对边界线确定车道的数目的步骤;以及
基于边界线和针对边界线确定的车道的数目来生成具有车道数目信息的路线地图的步骤。
注意,本技术的程序例如是可以通过以计算机可读格式提供的存储介质(例如,光盘、磁盘或半导体存储器)或通信介质(例如,网络)提供给能够执行各种程序代码的通用计算机的程序。通过以计算机可读格式提供这样的程序,在计算机上实现对应于程序的处理。
附图说明
图1是示出移动体控制系统的配置的图。
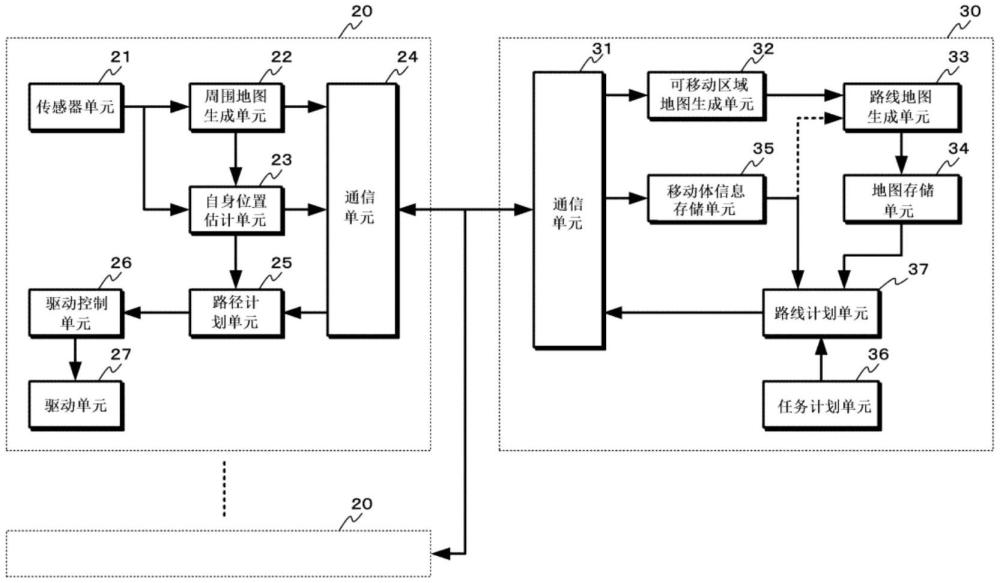
图2是示出移动体和服务器的配置的图。
图3是示出生成路线地图的操作的流程图。
图4是示出可移动区域地图的图。
图5是示出Voronoi区域划分的划分结果的图。
图6是示出分配了车道数目信息的边界线的图。
图7是示出在执行处理4-1和处理4-3的情况下的处理结果的图。
图8是用于说明在区域AR上执行处理4-4和处理4-5的情况的图。
图9是示出在执行处理4-4和处理4-5的情况下的处理结果的图。
图10是示出在执行处理4-6和处理4-7的情况下的处理结果的图。
图11是用于说明车道地图的生成的图。
图12是示出车道地图的图。
具体实施方式
在下文中,将描述用于实施本技术的模式。注意,将按以下顺序给出描述。
1.移动体控制系统的配置
2.移动体和服务器的配置
3.移动体和服务器的操作
3-1.关于路线地图的生成
3-2.关于路线计划的生成
3-3.关于路线地图和路线计划的生成的修改示例
3-4.关于车道地图的使用
4.应用示例
<1.移动体控制系统的配置>
图1示出了移动体控制系统的配置。移动体控制系统10包括多个移动体20和服务器30。
在移动体控制系统10中,由服务器30接收使用移动体20执行的移动任务,并且服务器30生成用于执行移动任务的路线计划并且将路线计划提供给移动体20。移动体20规划路径以沿着由从服务器30提供的路线计划指示的路线移动,并且执行移动任务。
移动任务是涉及诸如机器人或自动导引车辆(AGV)的移动体20的移动的任务,并且移动任务可以由任意移动体、具有预定功能或能力的移动体、指定移动体等来执行。此外,移动任务可以简单地是到达某个点并且执行任务(例如检查),或者可以是执行到另一点的其他移动(例如传送)。
服务器30执行任务计划以确定从用户等输入的移动任务被分配给哪个移动体(或者是否改变现有分配)。在任务计划中,可以使用各种方法而没有特别的限制。例如,在使用任意移动体的情况下,使用选择最靠近移动任务的目的地的空移动体的方法,在没有空移动体的情况下选择具有最少数目的分配任务的移动体的方法等。
当确定移动任务被分配到的移动体时,服务器30基于此时的路线地图生成路线计划。路线地图被表达为例如拓扑图,该拓扑图包括作为环境中的中间目的地候选的中继节点组和连接可直接通过的中继节点的边缘组。在使用路线地图的方法中,最初执行用于确定移动体在当前位置与最终目的地之间经过哪个中继节点或边缘的路线计划,并且根据路径计划执行到下一个节点的移动,使得与不使用节点的情况下计算从当前位置到最终目的地的路径并且执行移动的情况相比,减少了路径的计算量。Dijkstra算法等通常被用作路线计划方法。路线计划可以是在不改变另一移动体的路线计划的情况下添加目标移动体的路线计划的方法,或者可以优化整个路线计划,包括重新评估另一移动体的路线计划。
<2.移动体和服务器的配置>
接下来,将描述移动体(例如,无轨自动引导车辆)和服务器的配置。图2示出了移动体和服务器的配置。
移动体20包括传感器单元21、周围地图生成单元22、自身位置估计单元23、通信单元24、路径计划单元25、驱动控制单元26和驱动单元27。
传感器单元21包括外部传感器和内部传感器。传感器单元21的外部传感器获取关于移动体的周围环境的信息(例如,关于周围对象等的信息)。作为外部传感器,例如,使用距离测量传感器(光检测和测距,或激光成像检测和测距(LIDAR)传感器、飞行时间(TOF)、立体摄像装置等)。外部传感器生成指示到周围对象的距离的感测数据(也称为“距离测量数据”),并且将感测数据输出至周围地图生成单元22和自身位置估计单元23。此外,传感器单元21的内部传感器获取关于移动体本身的信息(例如,指示移动体的位置和取向、其变化等的信息)。作为内部传感器,例如使用位置传感器、角度传感器、加速度传感器、陀螺仪传感器等。内部传感器向自身位置估计单元23输出所生成的感测数据(也称为“内部感测数据”)。
周围地图生成单元22基于由传感器单元21生成的距离测量数据来生成指示位于附近的对象的地图信息。周围地图生成单元22将所生成的地图信息输出至通信单元24和路径计划单元25。
自身位置估计单元23基于由传感器单元21生成的内部感测数据或内部感测数据以及由外部传感器生成的距离测量数据来估计自身位置,并且将指示所估计的自身位置的自身位置信息输出至通信单元24和路径计划单元25。
通信单元24被连接至网络并且执行与服务器30的无线通信。无线通信可以包括例如使用LTE、WCDMA(注册商标)、5G等中的任何一个的蜂窝通信,并且可以包括使用Wi-Fi、蓝牙(注册商标)等中的任何一个的近场通信。通信单元24执行与服务器30的无线通信,并且将由周围地图生成单元22生成的地图信息和由自身位置估计单元23估计的自身位置发送至服务器30。注意,移动体20的通信单元24可以将指示移动体20的尺寸、性能等的移动体信息发送至服务器30。通信单元24接收从服务器30发送的例如路线计划的信息,并且将接收到的信息输出至路径计划单元25。
路径计划单元25通过使用由周围地图生成单元22生成的地图信息和自身位置估计单元23的估计结果来计划移动体20的路径,使得移动体20沿着由从服务器30提供的路线计划指示的路线移动。在路线计划中,如稍后将描述的,基于指示移动体可以通过的路线的路线地图和分配给移动体的移动任务,顺序地指示到目的地的节点,并且路径计划单元25确定从当前位置到第一节点的路径以及从当前节点到下一个节点的路径。路径计划单元25使用例如A*算法或快速探索随机树(RRT)算法作为路径搜索算法来执行对移动体20的周围环境的识别以及对下一个节点或目的地的路径搜索,并且通过重复确定此时的最佳移动速度、角速度等,即使当存在动态障碍物时,也可以在避免碰撞的同时执行移动操作。路径计划单元25将所确定的路径输出至驱动控制单元26。
驱动控制单元26产生驱动信号,使得移动体20在由路径计划单元25确定的路径上移动,并且将驱动信号输出至驱动单元27。
驱动单元27通过使用车轮、驱动源(例如,马达)等来配置,并且基于来自驱动控制单元26的驱动信号利用驱动源来驱动车轮以使移动体20移动。
服务器30包括通信单元31、可移动区域地图生成单元32、路线地图生成单元33、地图存储单元34、移动体信息存储单元35、任务计划单元36和路线计划单元37。
通信单元31被配置成能够执行与移动体20的通信单元24的无线通信。无线通信可以包括如上所述的蜂窝通信,或者可以包括近场通信。通信单元31执行与移动体20的无线通信,并且接收由移动体20生成的地图信息和指示所估计的自身位置的自身位置信息。通信单元31将接收到的地图信息和自身位置信息输出至可移动区域地图生成单元32。此外,通信单元31接收移动体信息并且将移动体信息输出至移动体信息存储单元35。此外,通信单元31将由路线计划单元37生成的路线计划发送至移动体20。
可移动区域地图生成单元32对由每个移动体20生成的地图信息进行整合,以生成指示移动体20可以在整个环境中通过的区域的可移动区域地图。可移动区域地图生成单元32将所生成的可移动区域地图输出至路线地图生成单元33。此外,可移动区域地图生成单元32可以基于由与移动体分开设置的外部传感器获取的感测数据来生成可移动区域地图,或者可以从外部装置等获取预先生成的可移动区域地图。此外,可移动区域地图生成单元32根据可移动区域的改变来更新可移动区域地图。例如,当确定移动体20可以通过的可移动区域由于障碍物的安装、移动、移除等而改变时,可移动区域地图生成单元32自动地更新可移动区域地图。
路线地图生成单元33基于由可移动区域地图生成单元32生成的可移动区域地图,生成具有与通路和通路宽度相关的车道数目信息的路线图。注意,稍后将描述路线地图的生成的细节。此外,路线地图生成单元33在可移动区域地图生成单元32确定可移动区域被改变并且更新了可移动区域地图的情况下,自动更新路线地图。
地图存储单元34存储由路线地图生成单元33生成的路线地图。此外,移动体信息存储单元35存储每个移动体的移动体信息。如上所述,可以通过与移动体20的通信来获取移动体信息,或者用户可以预先输入移动体信息。
任务计划单元36接收由用户等做出的移动任务请求,并且确定执行移动任务的移动体。此外,任务计划单元36将指示移动体和分配给移动体的移动任务的任务分配信息输出至路线计划单元37。
路线计划单元37针对每个移动体生成用于执行所分配的移动任务的路线计划。在路线计划的生成中,基于路线地图生成单元33生成的路线地图中所指示的通路和车道数目信息来确定到目的地的路线,并且例如,生成顺序地指示移动路线上的节点的列表。此外,路线计划单元37确定路线,使得在由多个移动体执行移动任务的情况下增加整个系统的移动效率。此外,在更新路线地图的情况下或者在提供新任务分配信息的情况下,路线计划单元37执行更新路线计划的处理。例如,在更新移动路线的车道数目信息的情况下,或者在执行新接收的移动任务的移动体的移动路线交叠的情况下,路线计划单元37考虑更新的车道数目信息、另一移动体的路线等来生成新的路线计划。路线计划单元37经由通信单元31将针对每个移动体生成的路线计划发送至相应的移动体20。
<3.移动体和服务器的操作>
在存在障碍物的环境中,服务器在可移动区域(即,移动体能够移动的区域)中的障碍物之间,设置由具有距障碍物相等距离的点群形成的边界线,并且根据距每个障碍物的距离以及在障碍物之间移动的移动体的尺寸来针对边界线确定车道数目。此外,服务器基于边界线和针对边界线确定的车道的数目来生成具有车道数目信息的路线地图。例如,服务器在边界线的分支点和端点处以及边界线的车道数目的变化点处设置节点,并且自动生成节点通过边缘连接的拓扑图作为路线地图。
此外,服务器选择执行移动任务的移动体,将行进方向上的节点顺序地分配给所选择的移动体,并且释放移动体所经过的节点,并且通过根据由节点和边缘确定的车道的数目限制同时存在的移动体的数目来生成路线计划。此外,在更新路线地图的情况下,服务器基于更新的路线地图和每个移动体的当前位置再次生成路线计划。服务器将所生成的路线计划发送至移动体。移动体计划路径以沿着由服务器生成的路线计划所指示的路线移动,并且执行移动任务。
<3-1.关于路线地图的生成>
接下来,将描述包括车道数目信息的路线地图的生成。图3是示出生成路线地图的操作的流程图。
在步骤ST1中,可移动区域地图生成单元生成可移动区域地图。可移动区域地图生成单元32例如对由每个移动体生成的地图信息进行整合,以生成指示在整个环境中移动体可以通过的区域的可移动区域地图,并且使处理进行到步骤ST2。注意,可移动区域地图生成单元32可以基于由与移动体分开设置的外部传感器获取的感测数据来生成可移动区域地图,或者可以从外部装置等获取可移动区域地图。注意,图4示出了可移动区域地图,并且检测到的障碍物由线(或点)指示。障碍物是指存在于环境中的对象,并且除了支架、纸板盒、桌子和椅子之外例如还包括诸如人或自动移动机器人的移动体。此外,还包括限定环境的对象(诸如墙或柱),作为障碍物。
在步骤ST2中,路线地图生成单元提取指示可移动区域的骨架的边界线。路线地图生成单元33从在步骤ST1中生成的可移动区域地图中提取指示可移动区域的骨架的边界线。使用例如Voronoi区域划分方法来提取指示骨架的边界线。二维的Voronoi区域划分是当在平面上预先设置多个点时基于“哪个是最近的点”将平面划分为区域的方法。路线地图生成单元33对整个可移动区域执行Voronoi区域划分,提取由具有与两个不同的障碍物的距离相同的特征的点群形成的边界线作为指示骨架的边界线,并且使处理进行到步骤ST3。注意,图5示出了Voronoi区域划分的划分结果,并且是使用图4所示的可移动区域地图执行步骤ST2的处理的情况。
在步骤ST3中,路线地图生成单元生成车道数目信息。路线地图生成单元33针对在步骤ST2中提取的边界线,生成指示与可以同时通过的移动体的数目对应的车道的数目的车道数目信息。例如,在指示骨架的边界线上的每个点处,在到障碍物的距离W小于移动体的尺寸的一半的值(下文中称为“尺寸R”)的情况下,移动体不能通过。因此,路线地图生成单元33删除移动体不能通过的边界线。注意,移动体的尺寸是垂直于移动方向的移动体宽度的最大值。此外,在移动体是无轨自动导引车(AGV)等的情况下,移动体宽度是包括待传送物品的尺寸。此外,移动体的尺寸可以包括余量。注意,包括待传送的物品的移动体宽度可以由所分配的移动任务来确定,并且例如,当通过移动任务明显地传送何种物品时,可以基于待传送的物品和移动体的形状来计算移动体宽度。
在分离了边界线的情况下,路线地图生成单元33仅留下具有最长总距离的边界线,并且删除其余的其他边界线。此外,路线地图生成单元33针对其余边界线生成车道数目信息。例如,在从边界线到障碍物的距离W等于或大于尺寸R的N倍且小于尺寸R的(N+1)倍的情况下,路线地图生成单元33将边界线上的车道数目信息设定为车道的数目N。路线地图生成单元33将所生成的车道数目信息分配给边界线,并且使处理进行到步骤ST4。
图6示出了分配了车道数目信息的边界线,并且示出了对图5所示的Voronoi区域划分的划分结果执行步骤ST3的处理的情况。在图6中,指示移动体不能通过的通路的边界线被删除,并且在其余的边界线被分离的情况下,仅留下具有最长总距离的边界线,而删除了其他的其余边界线。注意,在图6中,用粗线指示具有车道数目为“二”的边界线,用细线指示具有车道数目为“一”的边界线。
在步骤ST4中,路线地图生成单元生成拓扑图。路线地图生成单元33将节点分配给分配了车道数目信息的边界线,并且通过边缘连接节点以生成拓扑图。路线地图生成单元33对分配了车道数目信息的边界线执行以下处理以生成拓扑图。
·处理4-1:在边界线的端点、分支点和车道数目的改变点处设置节点。
·处理4-2:代替节点之间的边界线,设置用直线连接节点的边缘。
图7示出了在执行处理4-1和处理4-2的情况下获得的处理结果,并且示出了在具有图6所示的车道数目信息的边界线上执行处理的情况。
·处理4-3:在节点之间的距离小于第一阈值Lth1的情况下,通过在节点之间设置新的一个节点来代替节点之间距离短于第一阈值Lth1的两个节点,来执行节点组合处理。注意,第一阈值Lth1是即使当两个节点组合为一个节点时,移动体的移动路径中的差小于预定量的距离。
·处理4-4:在节点之间的边缘与边界线之间的最大分隔距离大于分隔距离阈值DSth的情况下,在节点之间的边界线上新设置节点,并且节点之间的边缘通过新设置的节点被划分为边缘。
·处理4-5:在边缘长度长于第二个阈值Lth2(Lth1 图8是用于说明在图7所示的区域AR上执行处理4-4和处理4-5的情况的图。注意,图8的(a)示出了处理前的状态,并且图8的(b)示出了处理后的状态。例如,在连接节点Nd1和节点Nd2的边缘与边界线之间的最大分隔距离为距离DSa且大于分隔距离阈值DSth的情况下,在节点Nd1与节点Nd2之间的边界线上新设置节点Nda,并且然后将连接节点Nd1和节点Nd2的边缘划分为连接节点Nd1和节点Nda的边缘以及连接节点Nda和节点Nd2的边缘。此外,在连接节点Nd4和节点Nd5的边缘与边界线之间的最大分隔距离为距离DSc且大于分隔距离阈值DSth的情况下,在节点Nd4与节点Nd5之间的边界线上新设置节点Ndc,并且然后将连接节点Nd4和节点Nd5的边缘划分为连接节点Nd4和节点Ndc的边缘以及连接节点Ndc和节点Nd5的边缘。 此外,例如,在连接节点Nd3和节点Nd4的边缘长于第二阈值Lth2的情况下,在节点Nd3和节点Nd4的边界线上新设置节点Ndb,并且然后将连接节点Nd3和节点Nd4的边缘划分为连接节点Nd3和节点Ndb的边缘以及连接节点Ndb和节点Nd4的边缘。类似地,在连接节点Nd6和节点Nd7的边缘和连接节点Nd6和节点Nd8的边缘长于第二阈值Lth2的情况下,在节点Nd6与节点Nd7之间的边界线和节点Nd6与节点Nd8之间的边界线上新设置节点Ndd和Nde以执行节点划分。 因此,当对图7的处理结果执行处理4-4和处理4-5时,得到图9的处理结果。 ·处理4-6:将每个边缘的车道数目信息设置为针对对应于边缘的边界线确定的车道的数目N。 ·处理4-7:将每个节点的车道数目信息设置为连接至节点的边缘中的最小车道数目。 图10示出了在对图9所示的处理结果执行处理4-6和处理4-7的情况下获得的处理结果。 路线地图生成单元33例如通过使用在步骤ST1中生成的可移动区域地图执行从步骤ST2至步骤ST4的处理,生成具有图10中示出的车道数目信息的拓扑图,并且将该拓扑图作为路线地图存储在地图存储单元34中。 <3-2.关于路线计划的生成> 接下来,将描述路线计划的生成。如上所述,由路线地图生成单元33生成并且存储在地图存储单元34中的路线地图是由节点和边缘配置的拓扑图,并且边缘长度被限制为一定距离或更小。此外,在路线地图中,指示可以同时存在多少移动体的车道数目信息被分配给每个节点。 路线计划单元37通过使用由路线地图生成单元33生成的拓扑图(路线地图)按时间序列中的步骤的数目来生成路线计划。也就是说,时间序列拓扑图之一指示将来时刻的拓扑图,并且移动体可以通过在时间序列中的一个步骤期间继续移动而移动到由边缘连接的相邻节点。 在路线计划中,每个时间序列步骤的拓扑图以时间序列排列。 ·拓扑图通过新的边缘连接,该新的边缘连接与相邻拓扑图之间的原始拓扑图的相同位置对应的节点。在这种情况下,指示移动体在一个时间序列步骤期间在相同节点处等待。 ·拓扑图由新的边缘连接,该新的边缘连接由原始拓扑图的边缘连接的相邻节点。在这种情况下,指示移动体在一个时间序列步骤期间移动到相邻节点。 以这种方式,通过如上所述用边缘连接在时间方向上相邻的拓扑图,可以配置通过在每个时间序列步骤中组合拓扑图而形成的时间序列拓扑图。 路线计划单元37以满足移动体在一个时间序列步骤中总是移动到下一个时间序列步骤的拓扑图上的任何节点的限制的形式跟踪时间序列拓扑图上的节点,并且以移动体到达作为目的地的位置处的节点的形式生成路径计划。此外,路线计划单元37通过限制移动体的数目以不超过由分配给节点和边缘的车道数目信息指示的车道的数目来设置路线,并且释放移动体已经通过的节点。 在添加新的移动体的路线计划的情况下,作为最简单的方法,例如,排除由于另一移动体的路线计划而在时间序列拓扑图上已经达到车道数目上限的节点,并且选择满足移动体在一个时间序列步骤中总是移动到下一个时间序列步骤的拓扑图的任何节点的限制的路线。例如,当通过使用Dijkstra的算法搜索路线时,路线计划单元37仅限制满足上述限制的路线作为搜索目标。 此外,作为用于添加新的移动体的路线计划的另一种方法,可以再次共同执行所有移动体的路线计划。具体地,通过全搜索等选择路线计划,该路线计划满足“移动体在一个时间序列步骤中总是移动到下一个时间序列步骤的拓扑图的任何节点”的限制条件以及“与车道的数目或更多对应的移动体不应存在于特定时间序列拓扑图的节点上”的限制。例如,路线计划单元37使用文献“Optimal Multi-Robot Path Planning on Graphs:Complete Algorithms and Effective Heuristics,Jingjin Yu Steven M.LaValle,2015”中描述的方法。 路线计划单元37将针对每个移动体的所生成的路线计划发送至相应的移动体,并且移动体基于由路线计划单元37生成的路线计划执行移动控制并且完成移动任务。 如上所述,当生成具有车道数目信息的路线地图时,即使在障碍物的布局动态改变并且移动体的可通过区域改变的环境中,也基于具有车道数目信息的路线地图来生成路线计划,使得即使在使用许多移动体时,也可以在不引起失速等的情况下处理移动任务。此外,不仅生成具有车道数目信息的路线地图,而且根据可移动区域的变化自动更新路线地图。因此,不需要根据障碍物的布局的改变来手动地重置路线地图,并且可以以低成本容易地执行有效的操作。 <3-3.关于路线地图和路线计划的生成的修改示例> 顺便说一下,在使用多个移动体的情况下,可以使用具有不同形状的移动体。在这种情况下,将具有不同形状的移动体的移动体信息存储在移动体信息存储单元35中,根据具有不同形状的移动体的宽度确定基本车道宽度,并且使用基本车道宽度计算车道的数目。此外,在路线计划中,基于由具有不同形状的移动体占据的车道的数目来计划移动体的路线。在这种情况下,车道的数目与可以同时通过的移动体的数目对应,但并不总是指示可以通过的移动体的数目,并且使用基本车道宽度计算的车道的数目被用作能够计算可以同时通过的移动体的数目的数目,如稍后所描述的。 接下来,将描述在移动体控制系统10中使用例如三种类型的移动体MOa、MOb和MOc的情况。移动体MOa的宽度是移动体宽度MWa,移动体MOb的宽度是移动体宽度MWb,并且移动体MOc的宽度是移动体宽度MWc。移动体MOa移动时所需的余量是宽度ma,移动体MOb移动时所需的余量是宽度mb,并且移动体MOc移动时所需的余量是宽度mc。注意,移动体宽度是如上所述包括待传送的物品的尺寸的尺寸。在这种情况下,当移动体MOa移动时占用宽度(MWa+ma)。类似地,当移动体MOb移动时占用宽度(MWb+mb),并且当移动体MOc移动时占用宽度(MWc+mc)。因此,计算满足式(1)、式(2)和式(3)的基本车道宽度BW。注意,被占用的车道的数目Ka、Kb和Kc是自然数,并且余量的宽度ma、mb和mc是小于基本车道宽度BW的值。 MWa+ma=Ka×BW...(1) MWb+mb=Kb×BW...(2) MWc+mc=Kc×BW...(3) 例如,在宽度(MWa+ma)=40cm、宽度(MWb+mb)=60cm和宽度(MWc+mc)=100cm的情况下,将作为每个宽度的最大公约数的20cm设置为基本车道宽度BW。在这种情况下,在移动体MOa的移动中占用两行(Ka=2),在移动体MOb的移动中占用三行(Kb=3),在移动体MOc的移动中占用五行(Kc=5)。 在使用具有不同形状的移动体的情况下,路线地图生成单元33基于根据存储在移动体信息存储单元35中的每个移动体的移动体信息确定的基本车道宽度BW来计算每个节点的车道的数目。具体地,在图3的步骤ST3中,以基本车道宽度BW的一半的尺寸作为尺寸R来计算车道的数目N。 在使用具有不同形状的移动体的情况下,路线计划单元37针对每个移动体设置占用车道的数目,并且生成路线计划,使得在每个节点处的占用车道的总数不超过在任何时间的车道的数目。 具体地,如上所述,基本车道宽度BW是20cm,移动体MOa的占用车道的数目是两行(Ka=2),移动体MOb的占用车道的数目是三行(Kb=3),并且移动体MOc的占用车道的数目是五行。在这种情况下,在具有六个车道的节点中,可以存在三个移动体MOa(占用车道的总数=2×3行)、两个移动体MOb(占用车道的总数=3×2行)、一个移动体MOc(占用车道的总数=1×5行),或者一个移动体MOa和一个移动体MOb(占用车道的总数=2+3行)。然而,移动体MOc和其他移动体MOa和MOb不能同时存在(占用车道的总数>6行)。因此,路线计划单元37基于每个移动体所占用的车道的数目来设置路线,以不超过节点的车道的数目。例如,在新执行移动体MOb的路线计划的情况下,当移动体MOb的占用车道的数目是三行时,在排除具有两个或更少的空车道的节点的同时搜索路线,并且生成路线计划。 <3-4.关于车道地图的使用> 顺便说一下,在上述实施方式中,已经描述了其中将车道数目信息分配给节点和边缘的拓扑图被生成为路线地图的情况。然而,还可以通过提供与车道的数目相同的数目的边缘以在相对端设置节点,并且使用其中节点和边缘的车道的数目是1的车道地图作为路线地图来生成路线计划。 在车道地图的生成中,执行以下处理。 ·处理5-1:在具有车道数目N的边缘的相对端节点附近生成新的N个节点(下文中称为“路点(WP)”),并且通过用边缘连接WP来将车道的数目设置为“1”。 ·处理5-2:WP在网格中通过边缘连接(以循环方式通过边缘连接),并且车道的数目被设置为“1”。 图11是用于说明车道地图的生成的图,其中,图11的(a)示出了其中将车道数目信息分配给节点和边缘的拓扑图,并且图11的(b)示出了与拓扑图对应的车道地图。当对其中将车道数目信息分配给节点和边缘的拓扑图执行处理5-1和处理5-2时,可以生成其中WP和边缘的车道数目为“1”的车道地图。 图12示出了使用图10所示的路线地图生成的车道地图。在路线地图的车道数目信息中,为车道的数目为“1”的通路设置一个边缘,为车道的数目为“2”的通路设置两个边缘。 路线计划单元37通过以与使用包括车道数目信息的路线地图的情况类似的方式使用车道地图来计划路线。 在路线计划单元37基于路线地图生成路线计划的情况下(在不使用车道地图的情况下),由于路线被确定为使得N个或更少的移动体可以通过具有N个车道的节点,所以保证了存在N个或更少的移动体的并行运行或N个或更少的移动体彼此通过所需的空间。然而,在实际并行运行或彼此通过时,必须执行控制,使得不会由于移动体的路径计划而发生接触或碰撞。例如,在彼此通过的情况下,当移动体在通过通路的中心的同时检测到另一移动体的存在时,移动体需要通过减速或方向改变来执行碰撞避免操作,这导致移动速度的降低等。 然而,在基于车道地图生成路线计划的情况下,路线计划单元37可以指定每个移动体通过的车道,使得可以并行行驶或彼此通过。因此,移动体不太可能执行减速操作或避让操作,从而不会由于路径计划而引起接触或碰撞,并且与不使用车道地图的路线计划相比,移动速度较少降低,并且可以有效地处理移动任务。 <4.应用示例> 根据本公开内容的技术可以应用于各种领域。例如,可以将根据本公开内容的技术实现为安装在任何类型的移动体上的装置(诸如汽车、电动车辆、混合动力电动车辆、摩托车、自行车、个人移动装置、轮船或机器人)。此外,可以将根据本公开内容的技术实现为安装在工厂生产过程中使用的设备、建筑领域中使用的设备或农业、林业等中使用的设备上的装置。当根据本公开内容的技术应用于这样的领域时,即使在移动体的可通过区域根据工作状况而改变的环境中,也可以使用多个设备有效地执行工作等。 说明书中描述的一系列处理可以由硬件、软件或者硬件和软件二者的组合配置来执行。在通过软件执行处理的情况下,将记录了处理序列的程序安装在包含专用硬件的计算机中的存储器中,并且执行该程序。替选地,可以在能够执行各种类型处理的通用计算机中安装和执行程序。 例如,程序可以被预先记录在作为记录介质的硬盘、固态驱动器(SSD)或只读存储器(ROM)中。替选地,程序可以临时地或永久地存储(记录)在可移除记录介质中,可移除记录介质例如软盘、致密盘只读存储器(CD-ROM)、磁光盘(MO)、数字多功能光盘(DVD)、蓝光光盘(BD)(注册商标)、磁盘或者半导体存储卡。这种可移除存储介质可以作为所谓的封装软件被提供。 此外,除了将程序从可移除记录介质安装至计算机之外,还可以经由诸如局域网(LAN)或因特网的网络将程序无线地或者通过有线从下载站点传输至计算机。在计算机中,如上所述传输的程序可以被接收并且安装在诸如内置硬盘的记录介质中。 注意,在本说明书中描述的效果仅仅是示例而非限制,并且可以提供未描述的附加效果。此外,本技术不应被解释为限于上述技术的实施方式。本技术的实施方式以例示的形式公开了本技术,并且明显的是,在不脱离本技术主旨的情况下,本领域技术人员可以对实施方式进行修改或替换。也就是说,为了确定本技术的主旨,应当考虑权利要求。 此外,本技术的信息处理装置还可以具有以下配置。 (1)一种信息处理装置,包括路线地图生成单元,所述路线地图生成单元被配置成在存在障碍物的环境中,在作为移动体能够移动的区域的可移动区域中的所述障碍物之间,设置由具有距所述障碍物中的两个不同障碍物相等距离的点群形成的边界线,以及根据从所述障碍物中的每一个到所述边界线的距离以及在所述环境中移动的所述移动体的尺寸来针对所述边界线确定车道的数目。 (2)根据(1)所述的信息处理装置,其中,所述车道的数目与能够同时通过的移动体的数目对应。 (3)根据(1)或(2)所述的信息处理装置,其中,所述路线地图生成单元对所述可移动区域执行Voronoi区域划分并且设置所述边界线。 (4)根据(1)至(3)中任一项所述的信息处理装置,其中,所述移动体的尺寸是垂直于移动方向的移动体宽度的最大值。 (5)根据(1)至(4)中任一项所述的信息处理装置,其中,所述移动体的尺寸包括余量。 (6)根据(1)至(5)中任一项所述的信息处理装置,其中,所述路线地图生成单元基于所述边界线和针对所述边界线确定的所述车道的数目来生成包括车道数目信息的路线地图。 (7)根据(1)至(6)中任一项所述的信息处理装置,其中,所述路线地图生成单元在所述边界线的分支点和端点处以及所述边界线的所述车道的数目的变化点处设置节点,并且生成其中所述节点通过边缘连接的拓扑图作为所述路线地图。 (8)根据(7)所述的信息处理装置,其中,在所述节点之间的距离短于第一阈值的情况下,所述路线地图生成单元在所述节点之间设置新的一个节点来代替所述节点之间的距离短于所述第一阈值的两个节点。 (9)根据(7)或(8)所述的信息处理装置,其中,在所述节点之间的边缘与所述边界线之间的最大分隔距离大于分隔距离阈值的情况下,所述路线地图生成单元在所述节点之间的所述边界线上新设置节点,并且将所述节点之间的边缘划分为通过新设置的节点的边缘。 (10)根据(8)或(9)所述的信息处理装置,其中,在所述节点之间的距离长于比所述第一阈值长的第二阈值的情况下,所述路线地图生成单元在所述节点之间的所述边界线上新设置节点,并且将所述节点之间的边缘划分为通过新设置的节点的边缘。 (11)根据(7)至(10)中任一项所述的信息处理装置,其中,所述路线地图生成单元将针对所述边界线确定的所述车道的数目设置为与所述边界线对应的边缘的车道数目信息。 (12)根据(7)至(11)中任一项所述的信息处理装置,其中,所述路线地图生成单元将连接至所述节点的边缘中的最小车道数目设置为所述节点的车道数目信息。 (13)根据(7)至(10)中任一项所述的信息处理装置,其中,所述路线地图生成单元提供与针对所述边界线确定的所述车道的数目相同的边缘的数目,并且在所述边缘的相对端处设置节点,以生成其中所述节点和所述边缘的车道的数目为1的车道地图作为所述路线地图。 (14)根据(6)至(13)中任一项所述的信息处理装置,其中,所述路线地图生成单元根据所述可移动区域的变化来更新所述路线地图。 (15)根据(6)至(14)中任一项所述的信息处理装置,还包括路线计划单元,所述路线计划单元被配置成通过使用包括所述车道数目信息的所述路线地图来计划所述移动体的路线。 (16)根据(15)所述的信息处理装置,其中,所述路线计划单元针对每个移动体计划路线,使得所述移动体的数目不超过由所述车道数目信息指示的车道的数目。 (17)根据(15)或(16)所述的信息处理装置,其中,所述路线地图生成单元通过使用与具有多个不同尺寸的移动体对应的基本车道宽度作为所述移动体的尺寸来确定所述车道的数目,并且 所述路线计划单元通过使用具有由具有多个不同尺寸的每个移动体占用的所述基本车道宽度的所述车道的数目来计划路线。 附图标记列表 10移动体控制系统 20移动体 21传感器单元 22周围地图生成单元 23自身位置估计单元 24、31通信单元 25路径计划单元 26驱动控制单元 27驱动单元 30服务器 32可移动区域地图生成单元 33路线地图生成单元 34地图存储单元 35移动体信息存储单元 36任务计划单元 37路线计划单元
- 信息处理方法、信息处理装置和信息处理程序
- 信息处理方法、信息处理装置以及信息处理程序
- 装置、信息处理装置、程序和信息处理方法
- 生物信息处理装置、生物信息处理方法和程序
- 信息处理方法、信息处理装置以及记录有程序的记录介质
- 信息处理服务器、信息处理方法、信息处理程序、记录了信息处理程序的记录介质、便携终端、便携式计算机的信息处理方法、便携终端用程序、以及记录了便携终端用程序的记录介质
- 信息处理方法、用于使计算机实施该信息处理方法的程序、实施该信息处理方法的信息处理装置及信息处理系统