一种车载视觉传感器的清洁装置
文献发布时间:2023-06-23 06:30:03
技术领域
本发明涉及汽车零部件技术领域,具体为一种车载视觉传感器的清洁装置。
背景技术
随着汽车工业的发展,在汽车上安装了越来越多的视觉传感器,以使得汽车越来越智能化。在汽车行驶过程中,需要将这些视觉传感器保持清洁,以避免影响其功能,车载多波段立体视觉传感器是应用于无人驾驶领域的重要传感器之一,其具备可见光与红外波段的立体成像与测距功能,其至少包含两个可见光相机与两个红外相机,并具备多波段融合功能以及一定的感知功能。
在现有技术中,当视觉传感器上附着有大量灰尘时需要对其进行清洁,否则会影响视觉传感器的使用,而现有的一般通过驱动电机带动刷把进行来回对其进行清洁,虽然能够对其进行清洁,但由于刷把的运动轨迹较为单一还是不能够对其进行完全清洁,还存在少量灰尘无法被清除导致效果不佳;鉴于此,我们提出了一种车载视觉传感器的清洁装置。
发明内容
针对现有技术的不足,本发明提供了一种车载视觉传感器的清洁装置,解决了上述背景技术提到的问题。
为实现以上目的,本发明通过以下技术方案予以实现:一种车载视觉传感器的清洁装置,包括传感器,所述传感器上固定安装有固定框架,所述固定框架外壁上固定安装有安装板,所述安装板的外壁上固定安装有电机,所述电机的输出端上固定连接有螺纹杆,所述螺纹杆贯穿固定框架的内部,所述螺纹杆与螺纹块的内部螺纹连接,所述螺纹块的外壁上固定安装有连接杆,所述连接杆的端部设置有清洁机构,所述固定框架的内部设置有传动机构,所述传感器的外侧设置有调节机构,所述清洁机构包括有:
套筒,所述套筒位于固定框架的外侧;
滑块,所述滑块与套筒的内壁滑动连接,所述滑块的外壁与连接杆的端部固定连接;
承载弹簧,所述承载弹簧的一端与滑块的外壁固定连接,所述承载弹簧的另一端与套筒的内壁固定连接。
可选的,所述套筒上固定安装有凸杆,所述套筒的底壁上固定安装有刷把,所述刷把设置为弹性材质。
可选的,所述固定框架的外壁与弯杆的一端固定连接,所述弯杆的另一端上固定连接有横板,所述横板的底壁上固定安装有凸块,所述凸块在横板的底壁上呈阵列分布。
可选的,所述传动机构包括有固定箱,所述固定箱固定安装在固定框架的内壁上。
可选的,所述固定箱的内部贯穿有挤压杆,所述挤压杆的外壁上套接有复位弹簧,所述复位弹簧的一端与固定箱的内壁固定连接,所述复位弹簧的另一端与挤压杆的外壁固定连接。
可选的,所述挤压杆贯穿导向板的内部,所述导向板固定安装在固定箱的内壁上,所述挤压杆的端部固定连接有连动杆,所述连动杆为弯折状。
可选的,所述挤压杆的外壁上固定安装还有齿条,所述齿条与半齿轮之间啮合,所述半齿轮套接在螺纹杆的外壁上。
可选的,所述调节机构包括有固定筒,所述固定筒固定安装在连动杆的端部,所述固定筒的内壁上滑动连接有滑板。
可选的,所述滑板的底壁上转动连接有调节杆,所述调节杆与扭簧的一端固定连接,所述扭簧的另一端与滑板的底壁弹性连接,所述调节杆的端部固定安装有推板,所述推板位于刷把的外侧。
可选的,所述调节杆的外壁上固定安装有限位尺,所述固定筒的内壁上固定安装有卡尺,所述卡尺与限位尺之间相互卡接,所述推板的内壁与压缩弹簧的一端固定连接,所述压缩弹簧的另一端上固定连接有承载板,所述承载板的外壁上固定安装有固定板,所述固定板的外壁上转动连接有滚轮。
本发明提供了一种车载视觉传感器的清洁装置。具备以下有益效果:
1、该车载视觉传感器的清洁装置通过清洁机构中的套筒带动凸杆向右运动的过程中被凸块挤压,进而使套筒带动刷把向右运动的清洁过程中进行上下运动,使刷把对传感器清洁效果更佳。
2、该车载视觉传感器的清洁装置通过传动机构中的半齿轮与齿条之间的间断性啮合使齿条带动挤压杆做左右往返运动,最后通过内部传动使调节杆端部固定连接有的推板不断对刷把的外壁进行挤压,使刷把在进行清洁工作时与传感器的外壁进行紧密贴合,使清洁效果更佳。
3、该车载视觉传感器的清洁装置通过调节杆带动限位尺进行转动与卡尺之间卡接被解除,进而能够对推板到刷把之间的距离进行调节,同时压缩弹簧的设置使滚轮向推板的内部进行收缩,防止对刷把的挤压力过大导致其发生折断,在保证刷把进行清洁的同时对其进行防护。
附图说明
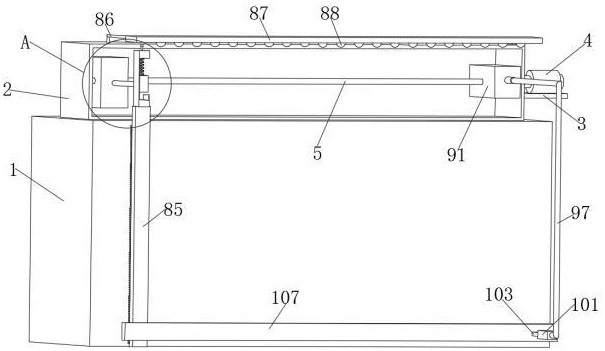
图1为本发明整体正视的结构示意图;
图2为本发明图1中A结构放大示意图;
图3为本发明传动机构结构示意图;
图4为本发明调节机构结构示意图;
图5为本发明推板内部结构示意图;
图6为本发明图5中B结构的放大示意图。
图中:1、传感器;2、固定框架;3、安装板;4、电机;5、螺纹杆;6、螺纹块;7、连接杆;8、清洁机构;81、套筒;82、滑块;83、承载弹簧;84、凸杆;85、刷把;86、弯杆;87、横板;88、凸块;9、传动机构;91、固定箱;92、挤压杆;93、复位弹簧;94、导向板;95、齿条;96、半齿轮;97、连动杆;10、调节机构;101、固定筒;102、滑板;103、调节杆;104、扭簧;105、限位尺;106、卡尺;107、推板;108、压缩弹簧;109、承载板;1010、固定板;1011、滚轮。
实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-图6,本发明提供一种技术方案:一种车载视觉传感器的清洁装置,包括传感器1,传感器1以全部图像中捕获光束的数千个清晰度,图像的质感和细致度通常以分辨率来考量,以像素数量表明,捕获图像后,传感器1将与储存在存储空间中的标准图像开展相对比较剖析,最后通过对数据进行分析后进行预警,传感器1上固定安装有固定框架2,固定框架2外壁上固定安装有安装板3,安装板3的外壁上固定安装有电机4,电机4的输出端上固定连接有螺纹杆5,需要对传感器1进行清洁时,通过启动电机4带动螺纹杆5进行转动,螺纹杆5贯穿固定框架2的内部,螺纹杆5与螺纹块6的内部螺纹连接,通过螺纹杆5与螺纹块6之间的螺纹连接,使螺纹块6带动连接杆7向右运动,螺纹块6的外壁上固定安装有连接杆7,连接杆7的端部设置有清洁机构8,固定框架2的内部设置有传动机构9,传感器1的外侧设置有调节机构10。
本实施例中,连接杆7的端部设置有清洁机构8,通过清洁机构8中的套筒81带动凸杆84向右运动的过程中被凸块88挤压,进而使套筒81带动刷把85向右运动的清洁过程中进行上下运动,使刷把85对传感器1清洁效果更佳。
本实施例中,固定框架2的内部设置有传动机构9,通过传动机构9中的半齿轮96与齿条95之间的间断性啮合使齿条95带动挤压杆92做左右往返运动,最后通过内部传动使调节杆103端部固定连接有的推板107不断对刷把85的外壁进行挤压,使刷把85在进行清洁工作时与传感器1的外壁进行紧密贴合,使清洁效果更佳。
本实施例中,传感器1的外侧设置有调节机构10,通过调节杆103带动限位尺105进行转动与卡尺106之间卡接被解除,进而能够对推板107到刷把85之间的距离进行调节,同时压缩弹簧108的设置使滚轮1011向推板107的内部进行收缩,防止对刷把85的挤压力过大导致其发生折断,在保证刷把85进行清洁的同时对其进行防护。
上述清洁机构8包括有套筒81,套筒81位于固定框架2的外侧,通过连接杆7带动与滑块82连接有的套筒81向右运动,套筒81的内壁上滑动连接有滑块82,滑块82的外壁与连接杆7的端部固定连接,滑块82的外壁与承载弹簧83的一端固定连接,承载弹簧83的另一端与套筒81的内壁固定连接,套筒81上固定安装有凸杆84,通过套筒81带动固定安装有的凸杆84向右运动过程中被凸块88挤压,使凸杆84带动套筒81向下运动,套筒81的底壁上固定安装有刷把85,套筒81带动底壁上固定安装有的刷把85向右运动对传感器1进行清洁工作,刷把85设置为弹性材质,固定框架2的外壁与弯杆86的一端固定连接,弯杆86的另一端上固定连接有横板87,横板87的底壁上固定安装有凸块88,凸块88在横板87的底壁上呈阵列分布,通过凸杆84不断被成列分布的凸块88挤压,使套筒81带动刷把85向右运动的过程中进行上下运动,使刷把85在进行工作时运动轨迹不再单一,进而使刷把85对传感器1清洁效果更佳。
上述传动机构9包括有固定箱91,固定箱91固定安装在固定框架2的内壁上,固定箱91的内部贯穿有挤压杆92,挤压杆92的外壁上套接有复位弹簧93,复位弹簧93的一端与固定箱91的内壁固定连接,复位弹簧93的另一端与挤压杆92的外壁固定连接,通过复位弹簧93的弹力使挤压杆92向左运动进行复位,挤压杆92贯穿导向板94的内部,导向板94固定安装在固定箱91的内壁上,挤压杆92的端部固定连接有连动杆97,通过半齿轮96与齿条95之间的间断性啮合,使挤压杆92带动连动杆97端部固定连接有的固定筒101做左右往返运动,连动杆97为弯折状,挤压杆92的外壁上固定安装还有齿条95,齿条95与半齿轮96之间啮合,半齿轮96进行转动,通过半齿轮96与齿条95之间的啮合使齿条95带动挤压杆92向右运动,半齿轮96套接在螺纹杆5的外壁上,通过螺纹杆5带动半齿轮96进行转动。
上述调节机构10包括有固定筒101,固定筒101固定安装在连动杆97的端部,固定筒101的内壁上滑动连接有滑板102,滑板102的底壁上转动连接有调节杆103,调节杆103与扭簧104的一端固定连接,扭簧104的另一端与滑板102的底壁弹性连接,通过扭簧104的弹力使调节杆103带动推板107之间进行复位,调节杆103的端部固定安装有推板107,推板107位于刷把85的外侧,调节杆103的外壁上固定安装有限位尺105,通过调节杆103带动限位尺105进行转动与卡尺106之间卡接被解除,进而能够对推板107到刷把85之间的距离进行调节,固定筒101的内壁上固定安装有卡尺106,卡尺106与限位尺105之间相互卡接,通过限位尺105与卡尺106之间的卡接,使固定筒101带动调节杆103端部固定连接有的推板107带动内部设置有的滚轮1011对刷把85的外壁进行挤压,最后使刷把85与传感器1的外壁进行紧密贴合,使清洁效果更佳,推板107的内壁与压缩弹簧108的一端固定连接,压缩弹簧108的另一端上固定连接有承载板109,通过压缩弹簧108的设置使滚轮1011向推板107的内部进行收缩,防止对刷把85的挤压力过大导致其发生折断,承载板109的外壁上固定安装有固定板1010,固定板1010的外壁上转动连接有滚轮1011。
工作时(或使用时),当需要对传感器1进行清洁时,通过启动电机4带动螺纹杆5进行转动,进而通过螺纹杆5与螺纹块6之间的螺纹连接,使螺纹块6带动连接杆7向右运动,进而通过连接杆7带动与滑块82连接有的套筒81向右运动,最后使套筒81带动底壁上固定安装有的刷把85向右运动对传感器1进行清洁工作,同时通过套筒81带动固定安装有的凸杆84向右运动,凸杆84向右运动的过程中被凸块88挤压,进而使凸杆84带动套筒81向下运动,最后通过凸杆84不断被凸块88挤压,进而使套筒81带动刷把85向右运动的过程中进行上下运动,使刷把85对传感器1清洁效果更佳,在进行清洁的过程中通过螺纹杆5带动半齿轮96进行转动,通过半齿轮96与齿条95之间的啮合使齿条95带动挤压杆92向右运动,再通过复位弹簧93的弹力使挤压杆92向左运动进行复位,最后通过半齿轮96与齿条95之间的间断性啮合,使挤压杆92带动连动杆97端部固定连接有的固定筒101做左右往返运动,再通过限位尺105与卡尺106之间的卡接,使固定筒101带动调节杆103端部固定连接有的推板107不断向右运动,进而使推板107带动内部设置有的滚轮1011对刷把85的外壁进行挤压,进而使刷把85在进行清洁工作的同时不断被挤压与传感器1的外壁进行紧密贴合,使清洁效果更佳,通过压缩弹簧108的设置使滚轮1011能够在挤压使进行收缩,防止对刷把85的挤压力过大导致其发生折断,同时通过调节杆103带动限位尺105进行转动与卡尺106之间卡接被解除,进而能够通过调节杆103带动推板107进行位置的调节,使推板107到刷把85之间的距离被调节,再通过扭簧104的弹力使调节杆103带动推板107之间进行复位,进而使撞击力度被调节使清洁效果达到最佳。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种视觉传感器网络多目标跟踪方法、装置及系统
- 一种基于视觉传感器足式机器人足端多维力感知装置
- 一种车载通信设备的升级方法、装置和车载通信设备
- 一种自动调节出风量大小的清洁型车载空调
- 车载视觉传感器的清洁装置和汽车
- 车载光学表面的清洁装置和系统以及具有清洁装置的车载光学传感器